TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135636
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033470
出願日
2024-03-06
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
B60L
3/00 20190101AFI20250911BHJP(車両一般)
要約
【課題】加速度で負荷を検出する場合に比べて、急加速を抑制する応答性を向上させること。
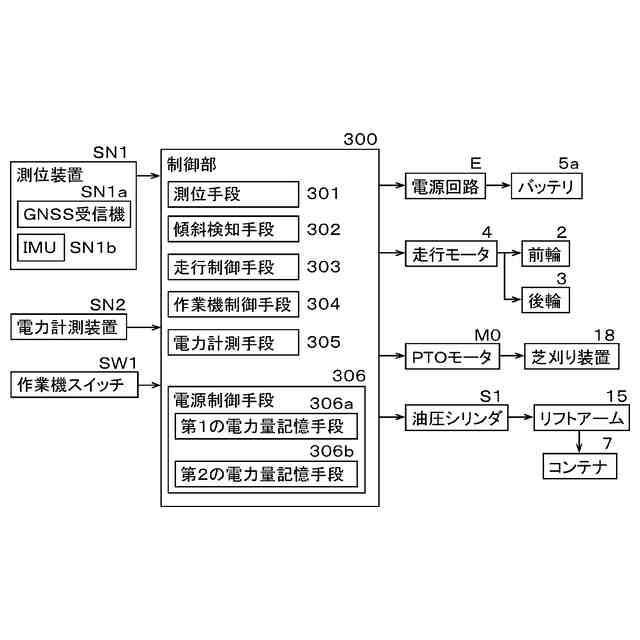
【解決手段】制御部(300)が、走行装置(2,3)を作動し且つ作業機(18)を作動しない場合には第1の電力量(A1)を上限として電力を電動機(4,M0)に供給し、走行装置(2,3)を作動し且つ作業機(18)を作動する場合には第2の電力量(A2)を上限として電力を電動機(4,M0)に供給することで、加速度で負荷を検出する場合に比べて、急加速を抑制する応答性を向上させることができる。
【選択図】図2
特許請求の範囲
【請求項1】
車両本体(1a)と、
前記車両本体(1a)に支持され、圃場に対して作業を行う作業機(18)と、
前記車両本体(1a)の走行装置(2,3)を駆動する第1の電動機(4)と、前記作業機(18)を駆動する第2の電動機(M0)と、を有する電動機(4,M0)と、
前記電動機(4,M0)へ供給する電源を制御する制御部(300)であって、前記走行装置(2,3)を作動し且つ前記作業機(18)を作動しない場合には予め定められた第1の電力量(A1)を上限として電力を前記電動機(4,M0)に供給し、前記走行装置(2,3)を作動し且つ前記作業機(18)を作動する場合には前記第1の電力量(A1)よりも大きく且つ予め定められた第2の電力量(A2)を上限として電力を前記電動機(4,M0)に供給する前記制御部(300)と、
を備えたことを特徴とする作業車両。
続きを表示(約 500 文字)
【請求項2】
前記車両本体(1a)の傾斜角を検知する傾斜検知手段(302)と、
前記傾斜角が予め定められた閾値に達する場合には、前記電動機(4,M0)に供給される電力量を、前記第1の電力量(A1)および前記第2の電力量(A2)よりも低い電力量に制限する前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記第2の電動機(M0)での消費電力を計測する電力計測手段(305)と、
予め定められた標準用の第2の電力量の下限値(A2b1)と、予め定められた軽負荷用の第2の電力量の下限値(A2b2)と、を有し、前記作業機(18)の作動中の前記電力計測手段(305)の計測結果に基づいて、計測された消費電力が前記標準用の第2の電力量の下限値(A2b1)に達しない場合に、前記電動機(4,M0)に供給する電力の下限値を、前記標準用の第2の電力量の下限値(A2b1)から前記軽負荷用の第2の電力量の下限値(A2b2)に低下するように制御する前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関し、特に、走行装置や作業機を電動で駆動する作業車両に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
動力源に電動モータを使用するフォークリフトにおいて、検出加速度の検出値として第1上限値と第2上限値を設け、検出加速度が第2上限値以上の場合に走行モータに供給される電流値を低下させることで、フォークリフトの急加速を抑制し、検出加速度が第1上限値以下の場合に走行モータの電流値を目標電流値になるようにすることで、フォークリフトの加速の応答性を向上させる技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2002-95113号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
フォークリフトでは、荷物の重さによって負荷が変わり、加速度の検出での判別では応答性が悪い問題がある。したがって、荷物が比較的軽量の状況では第2上限値に達していない状況でも急加速する恐れがある。芝刈り機等の作業機を装備した作業車両において急加速すると、比較的強度のあるフォークに比べて、強度の弱い部品の多い作業機が破損しやすい問題がある。また、フォークリフトよりも芝刈り機の方が速度上限が高速の場合があり、運転者の危険性も高い問題もある。
【0005】
本発明は、加速度で負荷を検出する場合に比べて、急加速を抑制する応答性を向上させることを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、車両本体(1a)と、前記車両本体(1a)に支持され、圃場に対して作業を行う作業機(18)と、前記車両本体(1a)の走行装置(2,3)を駆動する第1の電動機(4)と、前記作業機(18)を駆動する第2の電動機(M0)と、を有する電動機(4,M0)と、前記電動機(4,M0)へ供給する電源を制御する制御部(300)であって、前記走行装置(2,3)を作動し且つ前記作業機(18)を作動しない場合には予め定められた第1の電力量(A1)を上限として電力を前記電動機(4,M0)に供給し、前記走行装置(2,3)を作動し且つ前記作業機(18)を作動する場合には前記第1の電力量(A1)よりも大きく且つ予め定められた第2の電力量(A2)を上限として電力を前記電動機(4,M0)に供給する前記制御部(300)と、を備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記車両本体(1a)の傾斜角を検知する傾斜検知手段(302)と、前記傾斜角が予め定められた閾値に達する場合には、前記電動機(4,M0)に供給される電力量を、前記第1の電力量(A1)および前記第2の電力量(A2)よりも低い電力量に制限する前記制御部(300)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記第2の電動機(M0)での消費電力を計測する電力計測手段(305)と、予め定められた標準用の第2の電力量の下限値(A2b1)と、予め定められた軽負荷用の第2の電力量の下限値(A2b2)と、を有し、前記作業機(18)の作動中の前記電力計測手段(305)の計測結果に基づいて、計測された消費電力が前記標準用の第2の電力量の下限値(A2b1)に達しない場合に、前記電動機(4,M0)に供給する電力の下限値を、前記標準用の第2の電力量の下限値(A2b1)から前記軽負荷用の第2の電力量の下限値(A2b2)に低下するように制御する前記制御部(300)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【発明の効果】
【0009】
請求項1記載の発明によれば、制御部(300)が、走行装置(2,3)を作動し且つ作業機(18)を作動しない場合には第1の電力量(A1)を上限として電力を電動機(4,M0)に供給し、走行装置(2,3)を作動し且つ作業機(18)を作動する場合には第2の電力量(A2)を上限として電力を電動機(4,M0)に供給することで、加速度で負荷を検出する場合に比べて、急加速を抑制する応答性を向上させることができる。
【0010】
請求項2記載の発明によれば、請求項1記載の発明の効果に加えて、制御部(300)が、傾斜角が閾値に達する場合に電動機(4,M0)に供給される電力量を、第1の電力量(A1)および第2の電力量(A2)よりも低い電力量に制限することで、電力量を制限しない場合に比べて、急加速を抑制できる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ