TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132853
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024030690
出願日
2024-02-29
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
61/00 20060101AFI20250903BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】クルーズコントロール中の作業機の過負荷を防止できるとともに、安全性を向上できる作業車両を提供すること。
【解決手段】実施形態の一態様に係る作業車両は、走行車体と、作業機と、走行用モーターと、走行用モーターコントローラーと、作業用モーターと、作業用モーターコントローラーと、バッテリと、車両コントローラーと、クルーズコントロール指示部とを備える。作業車両は、車両コントローラーが走行車体のクルーズコントロールを制御する。車両コントローラーは、作業機の作業負荷に応じて走行車体のクルーズコントロール中の車速を調整するとともに、走行車体が前進時である場合のみクルーズコントロールを開始し、走行車体が後進時および停止時である場合においてはクルーズコントロールを開始しない。
【選択図】図2
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体に取り付けられた作業機と、
前記走行車体を駆動する走行用モーターと、
前記走行用モーターの駆動を制御する走行用モーターコントローラーと、
前記作業機を駆動する作業用モーターと、
前記作業用モーターの駆動を制御する作業用モーターコントローラーと、
前記走行用モーターおよび前記作業用モーターへ電力を供給するバッテリと、
前記走行用モーターコントローラーおよび前記作業用モーターコントローラーを制御する車両コントローラーと、
前記走行車体のクルーズコントロールの開始を指示するクルーズコントロール指示部とを備え、
前記車両コントローラーが前記走行車体のクルーズコントロールを制御する作業車両であって、
前記車両コントローラーは、前記作業機の作業負荷に応じて前記走行車体のクルーズコントロール中の車速を調整するとともに、前記走行車体が前進時である場合のみクルーズコントロールを開始し、前記走行車体が後進時および停止時である場合においてはクルーズコントロールを開始しない作業車両。
続きを表示(約 900 文字)
【請求項2】
前記作業機による作業出力のオンオフを切り替える作業出力指示部を備え、
前記車両コントローラーは、
クルーズコントロールが適用可能な最高車速が設定され、設定された前記最高車速以内でクルーズコントロールを行い、
前記作業用モーターの電流値に基づいて作業負荷を算出し、
前記作業機による作業出力がオンの場合、算出した作業負荷に応じて前記最高車速以内で車速調整を行う負荷制御を行い、前記負荷制御を適用しながらクルーズコントロールを行う請求項1に記載の作業車両。
【請求項3】
前記車両コントローラーは、
作業負荷の閾値である第1閾値と、前記第1閾値よりも小さい作業負荷の閾値である第2閾値とが設定され、
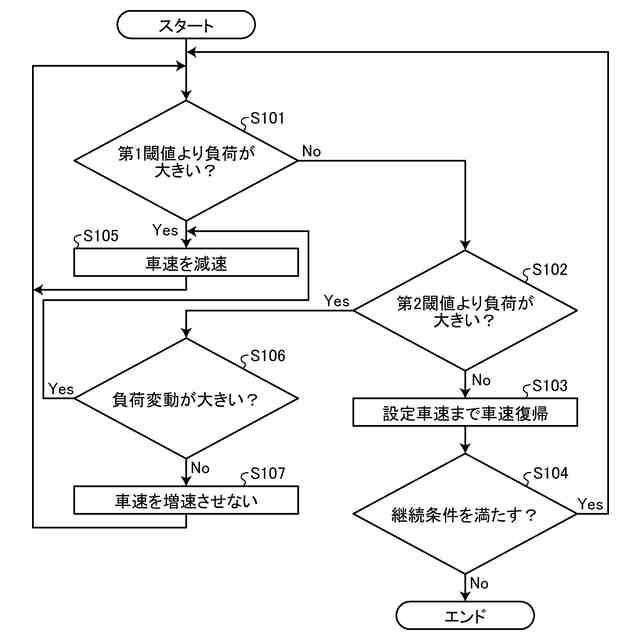
クルーズコントロール中に前記作業機の作業負荷が前記第1閾値の作業負荷を超えている場合、一定の減速度で車速を下げていき、
クルーズコントロール中に前記作業機の作業負荷が前記第2閾値の作業負荷を超えている場合、単位時間当たりの負荷変動を算出して、前記単位時間当たりの負荷変動が所定値よりも大きい場合に、一定の減速度で車速を下げていく請求項1または請求項2に記載の作業車両。
【請求項4】
前記作業機は、前記作業用モーターの最大出力を変更可能な作業モードを複数備え、
前記車両コントローラーは、前記作業モード毎に、作業負荷に応じて前記走行車体を減速および増速させる際の減速度および加速度を異なる値に変更可能である請求項1または請求項2に記載の作業車両。
【請求項5】
前記車両コントローラーは、
作業負荷に応じたクルーズコントロールの設定値が設定可能であり、
前記設定値に基づいて、作業負荷が上昇して前記走行車体を減速させる際の減速度を調整可能であるとともに、作業負荷が低下して前記走行車体の車速を復帰させる際の加速度を調整可能であり、
クルーズコントロールの設定車速をクルーズコントロール中に変更可能である請求項1または請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、自動操舵運転を行う作業車両の制御システムを備えた作業車両が知られている(たとえば、特許文献1参照)。
【0003】
制御システムは、作業車両の目標経路を記憶する記憶装置を備える。また、制御システムは、測位装置によって特定された作業車両の位置、および記憶装置に記憶された目標経路に基づいて、作業車両が目標経路に沿って走行するように作業車両の操舵を制御する制御装置を備える。制御装置は、ユーザによって設定された基準速度で走行させるクルーズコントロール機能を備える。
【先行技術文献】
【特許文献】
【0004】
特開2022-141259号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の作業車両のクルーズコントロールでは、作業機の作業負荷が高い場合でも一定速で作業するため過負荷になりやすい。また、作業車両は、前進時、後進時、停止時の走行状態に応じてクルーズコントロールを行う方がより安全性が高い。しかしながら、上記の従来技術では、クルーズコントロールの詳細な制御内容の開示がなく、作業機の過負荷を防止する制御および作業車両の走行状態に応じた制御についての開示がない。
【0006】
本発明は、上記に鑑みてなされたものであって、クルーズコントロール中の作業機の過負荷を防止できるとともに、安全性を向上できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
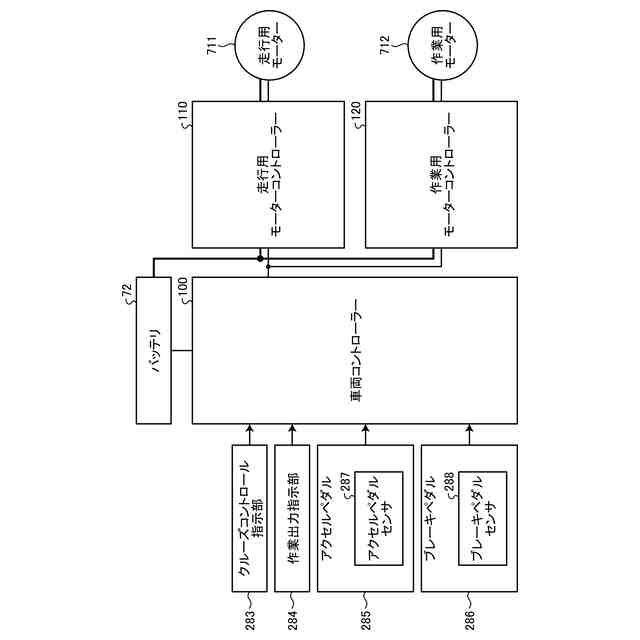
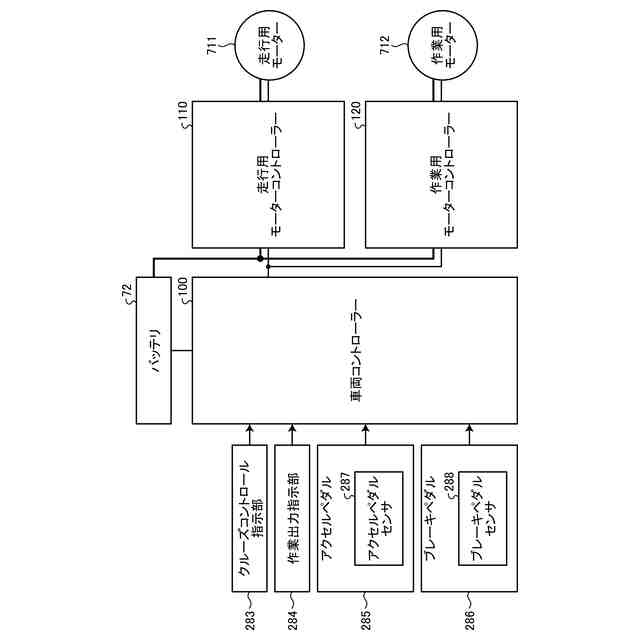
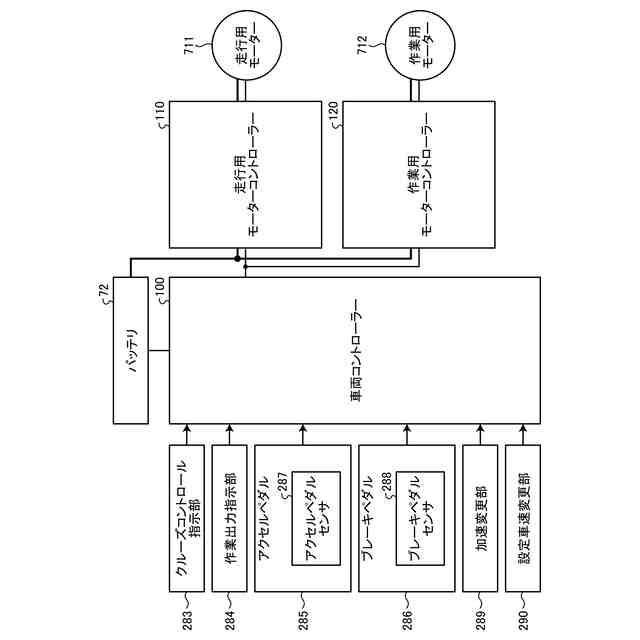
上述した課題を解決し、目的を達成するために、走行車体(2)と、前記走行車体(2)に取り付けられた作業機(3)と、前記走行車体(2)を駆動する走行用モーター(711)と、前記走行用モーター(711)の駆動を制御する走行用モーターコントローラー(110)と、前記作業機(3)を駆動する作業用モーター(712)と、前記作業用モーター(712)の駆動を制御する作業用モーターコントローラー(120)と、前記走行用モーター(711)および前記作業用モーター(712)へ電力を供給するバッテリ(72)と、前記走行用モーターコントローラー(110)および前記作業用モーターコントローラー(120)を制御する車両コントローラー(100)と、前記走行車体のクルーズコントロールの開始を指示するクルーズコントロール指示部(283)とを備え、前記車両コントローラー(100)が前記走行車体(2)のクルーズコントロールを制御する作業車両(1)であって、前記車両コントローラー(100)は、前記作業機(3)の作業負荷に応じて前記走行車体(2)のクルーズコントロール中の車速を調整するとともに、前記走行車体(2)が前進時である場合のみクルーズコントロールを開始し、前記走行車体(2)が後進時および停止時である場合においてはクルーズコントロールを開始しない。
【発明の効果】
【0008】
実施形態に係る充電システムによれば、クルーズコントロール中の作業機の過負荷を防止できるとともに、安全性を向上できる。
【図面の簡単な説明】
【0009】
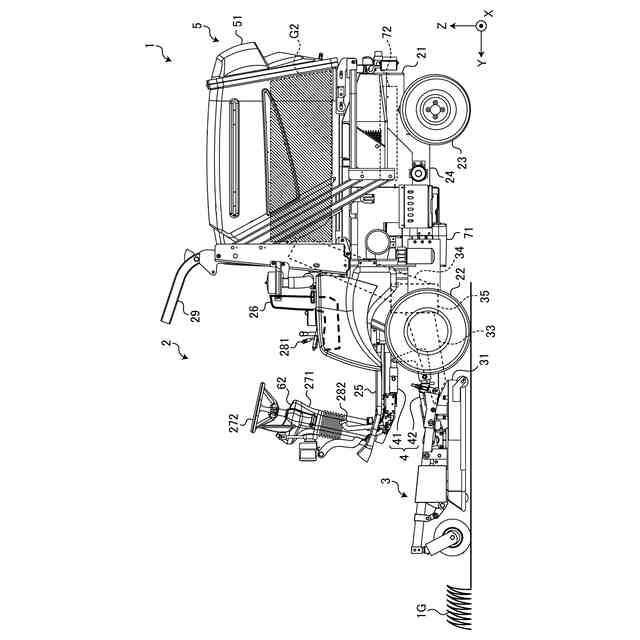
図1は、実施形態に係る作業車両の全体構成を示す図である。
図2は、実施形態に係る作業車両における制御系の一例を示すブロック図である。
図3は、実施形態に係る作業車両における作業負荷に応じたクルーズコントロール制御の処理手順を示すフローチャートである。
図4は、実施形態に係る作業車両における制御系の一例を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ