TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025138114
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024036954
出願日
2024-03-11
発明の名称
農作業車
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
59/042 20060101AFI20250917BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
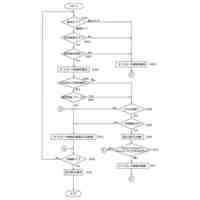
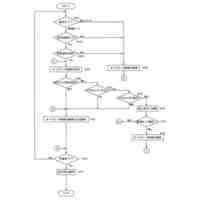
【課題】本発明は、設定した作業経路を手動或いは自動で操縦しながら機体の後に装着した作業機を作動させて農作業をする場合に、作業機が所望の農作業を行えない状態であることを走行開始前に作業者に知らせることで、無駄に作業走行を行うのを防ぐことを課題とする。
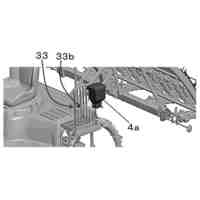
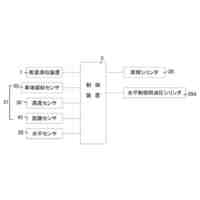
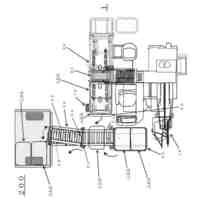
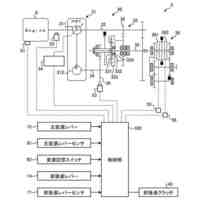
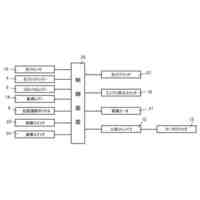
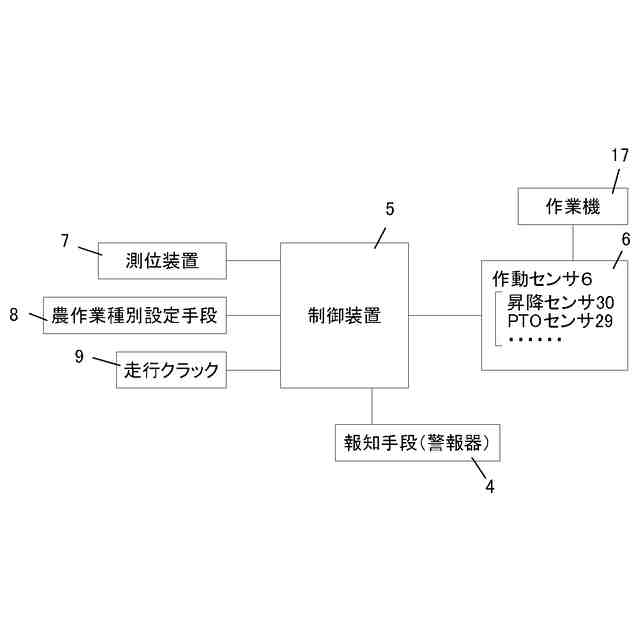
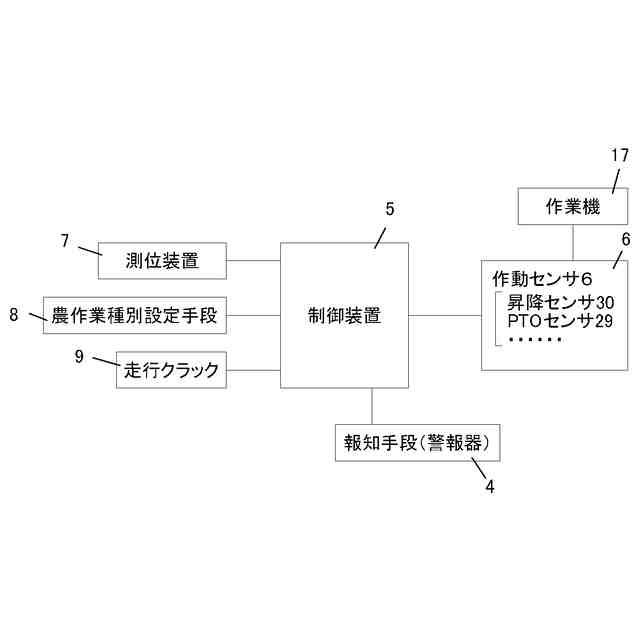
【解決手段】農作業車10に搭乗した作業者が機体を操縦して作業機17で所望の農作業を行う農作業車において、作業機17で行う農作業種別を制御装置5に入力する作業種別設定手段8と作業機17の作動を検出する作動センサ6を設け、走行クラッチ9の入力時に作動センサ6が作業種別設定に適した作業機17の作動を検出しないと制御装置5が作業者への報知手段4を作動することを特徴とする農作業車とする。
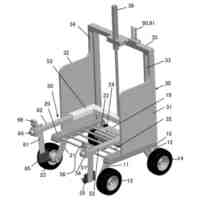
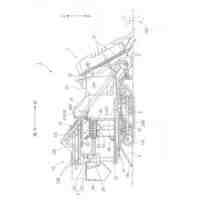
【選択図】図2
特許請求の範囲
【請求項1】
農作業車(10)に搭乗した作業者が機体を操縦して作業機(17)で所望の農作業を行う農作業車において、作業機(17)で行う農作業種別を制御装置(5)に入力する作業種別設定手段(8)と作業機(17)の作動を検出する作動センサ(6)を設け、走行クラッチ(9)の入力時に作動センサ(6)が作業種別設定に適した作業機(17)の作動を検出しないと制御装置(5)が作業者への報知手段(4)を作動することを特徴とする農作業車。
続きを表示(約 510 文字)
【請求項2】
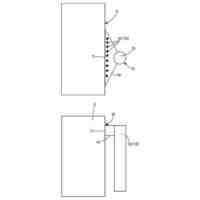
作業機(17)を機体に対して降下させて行う農作業の場合、作動センサ(6)が作業機(17)の昇降を検出する昇降センサ(30)で、該昇降センサ(30)が走行クラッチ(9)の入力時に作業機(17)が所定高さ以上であることを検出すると、制御装置(5)が作業者への報知手段(4)を作動することを特徴とする請求項1に記載の農作業車。
【請求項3】
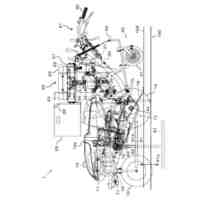
作業機(17)をPTO軸(15)で駆動する場合に作動センサ(6)がPTO軸(15)の駆動を検出するPTOセンサ(29)で、該PTOセンサ(29)が走行クラッチ(9)の入力時に停止を検出すると制御装置(5)が作業者への報知手段(4)を作動することを特徴とする請求項1に記載の農作業車。
【請求項4】
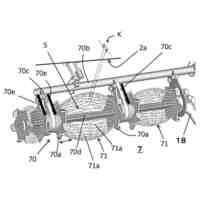
作業機(17)の駆動を復路走行時に往路走行時とは逆駆動して集草作業を行う集草作業の場合に作動センサ(6)が集草具の逆回転を検出するPTOセンサ(29)で、復路走行時の走行クラッチ(9)の入力時にPTOセンサ(29)が逆回転を検出しないと制御装置(5)が作業者への報知手段(4)を作動することを特徴とする請求項1に記載の農作業車。
発明の詳細な説明
【技術分野】
【0001】
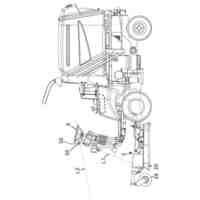
本発明は、農作業を行う作業機を機体に装着して作業しながら農地を走行する農作業車に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
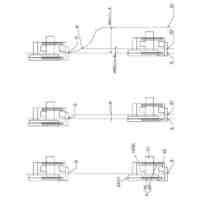
圃場に設定した作業経路を自立で走行しながら農作業を行う農作業車の自律走行システムが特許第7065170号公報に記載されている。この農作業車は、転回等の作業状態を変更する場合には事前に警報を出して機体の周囲に居る補助作業者に注意を促して危害が及ぶのを避けるようにしている。
【先行技術文献】
【特許文献】
【0003】
特許第7065170号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
機体後側に作業機を装着して前進走行で作業を行う農作業車では、うっかりして作業機が作業に適した状態になっていないままで作業走行を開始することがあると、所望の農作業が行われていないことに気付くまで無駄に走行してしまう。
【0005】
本発明は、設定した作業経路を手動或いは自動で操縦しながら機体の後に装着した作業機を作動させて農作業をする場合に、作業機が所望の農作業を行えない状態であることを走行開始前に作業者に知らせることで、無駄に作業走行を行うのを防ぐことを課題とする。
【課題を解決するための手段】
【0006】
上記本発明の課題は、次の技術手段により解決される。
【0007】
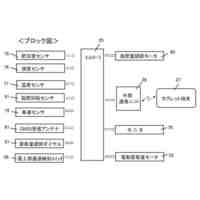
請求項1の発明は、農作業車10に搭乗した作業者が機体を操縦して作業機17で所望の農作業を行う農作業車において、作業機17で行う農作業種別を制御装置5に入力する作業種別設定手段8と作業機17の作動を検出する作動センサ6を設け、走行クラッチ9の入力時に作動センサ6が作業種別設定に適した作業機17の作動を検出しないと制御装置5が作業者への報知手段4を作動することを特徴とする農作業車とする。
【0008】
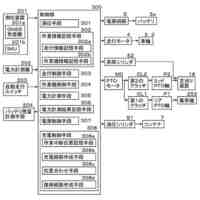
請求項2の発明は、作業機17を機体に対して降下させて行う農作業の場合、作動センサ6が作業機17の昇降を検出する昇降センサ30で、該昇降センサ30が走行クラッチ9の入力時に作業機17が所定高さ以上であることを検出すると、制御装置5が作業者への報知手段4を作動することを特徴とする請求項1に記載の農作業車の作業警報装置とする。
【0009】
請求項3の発明は、作業機17をPTO軸15で駆動する場合に作動センサ6がPTO軸15の駆動を検出するPTOセンサ29で、該PTOセンサ29が走行クラッチ9の入力時に停止を検出すると制御装置5が作業者への報知手段4を作動することを特徴とする請求項1に記載の農作業車の作業警報装置とする。
【0010】
請求項4の発明は、作業機17の駆動を復路走行時に往路走行時とは逆駆動して集草作業を行う集草作業の場合に作動センサ6が集草具の逆回転を検出するPTOセンサ29で、復路走行時の走行クラッチ9の入力時にPTOセンサ29が逆回転を検出しないと制御装置5が作業者への報知手段4を作動することを特徴とする請求項1に記載の農作業車の作業警報装置とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
屋外作業車
5日前
井関農機株式会社
圃場作業機
12日前
井関農機株式会社
水田作業機
22日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
歩行型耕運機
1か月前
井関農機株式会社
根菜類収穫機
23日前
井関農機株式会社
乗用型苗植機
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ