TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149030
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049457
出願日
2024-03-26
発明の名称
穀稈の刈取作業方法
出願人
井関農機株式会社
代理人
弁理士法人永井国際特許事務所
主分類
A01D
41/12 20060101AFI20251001BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動操作されているコンバインが圃場を区画する畦等に接触するのを防止することができる穀稈の刈取作業方法を提供する。
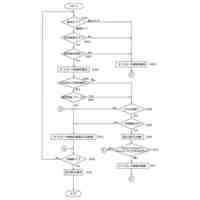
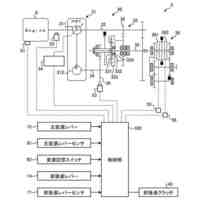
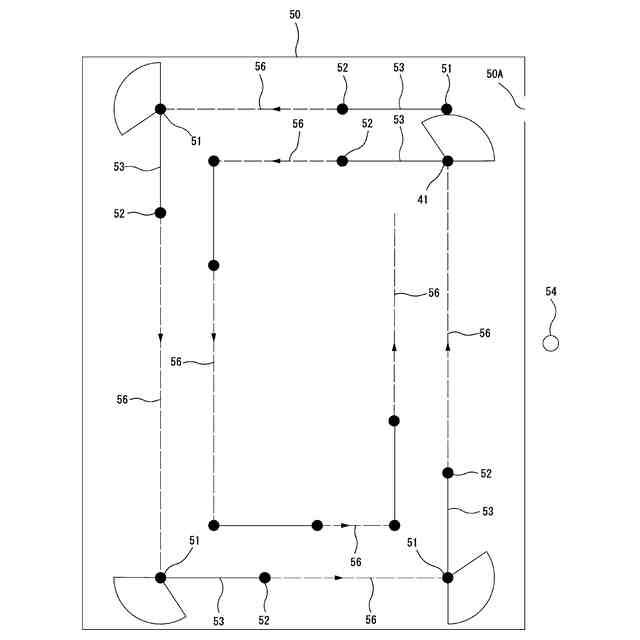
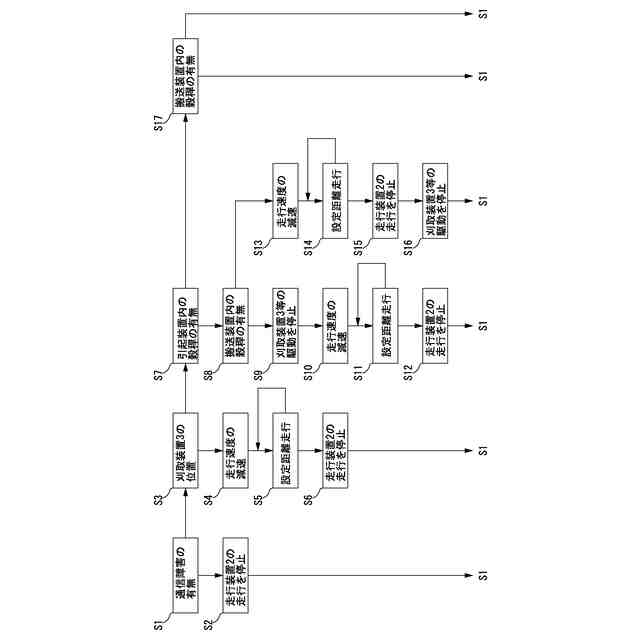
【解決手段】操縦部(5)にコンバインを自動操舵させる設定経路(55,56)を設定するコントローラ(40)を設け、コントローラ(40)は、コンバインの自動操舵中に、刈取装置(3)の穀稈を引起す引起装置内に穀稈が無く、刈取装置(3)の穀稈を脱穀装置(4)に搬送する搬送装置内に穀稈が無い場合には、刈取装置(3)の駆動を停止させた後に、走行装置(2)の走行を停止させ、コントローラ(40)は、コンバインの自動操舵中に、引起装置内に穀稈が無く、搬送装置内に穀稈が有る場合には、走行装置(2)の走行を停止させた後に、刈取装置(3)の駆動を停止させる。
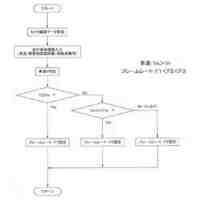
【選択図】図9
特許請求の範囲
【請求項1】
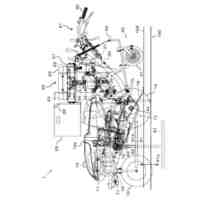
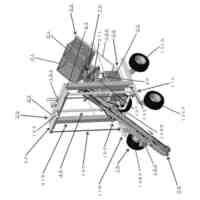
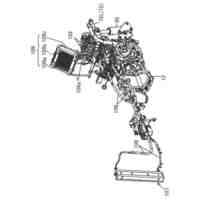
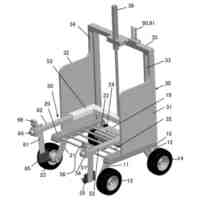
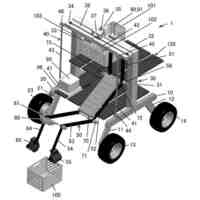
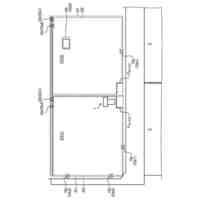
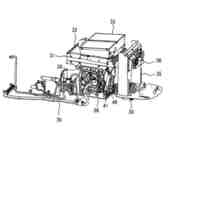
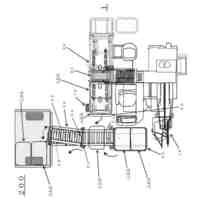
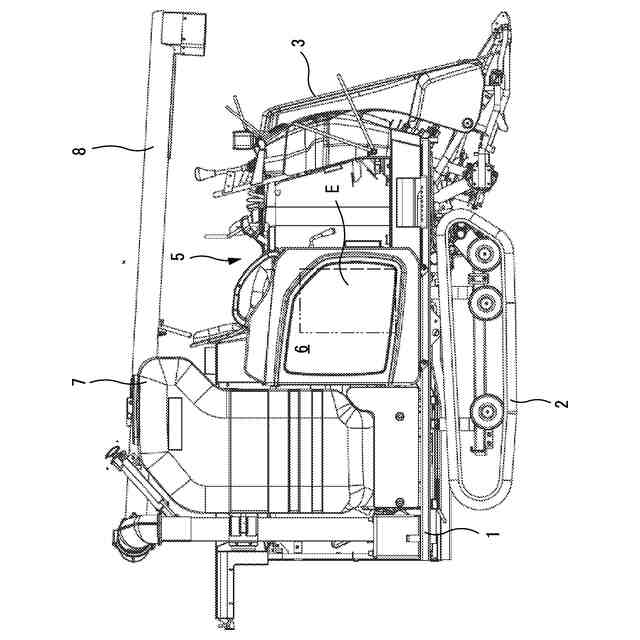
エンジン(E)を搭載した機体フレーム(1)の下側に圃場を走行する走行装置(2)と、該機体フレーム(1)の前側に穀稈を刈取る刈取装置(3)と、該刈取装置(3)の後方左側に脱穀処理を行う脱穀装置(4)と、前記刈取装置(3)の後方右側に作業者が搭乗する操縦部(5)と、該操縦部(5)の後側にグレンタンク(7)を設けたコンバインを使用して圃場の穀稈を刈取る穀稈の刈取作業方法において、
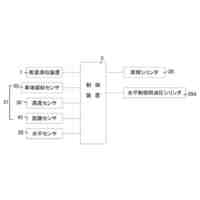
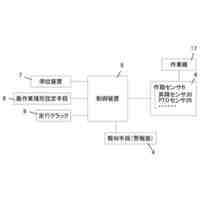
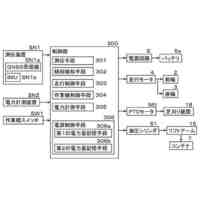
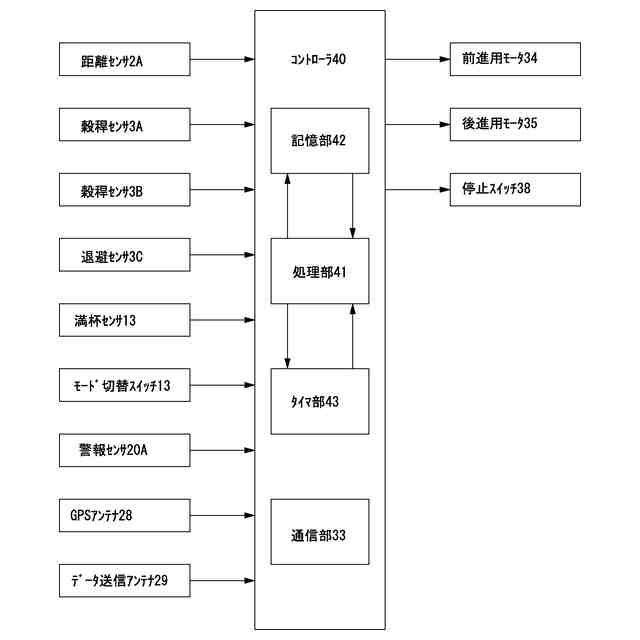
前記操縦部(5)にコンバインを自動操舵させる設定経路(55,56)を設定するコントローラ(40)を設け、
前記コントローラ(40)は、前記コンバインの自動操舵中に、前記刈取装置(3)の穀稈を引起す引起装置内に穀稈が無く、前記刈取装置(3)の穀稈を脱穀装置(4)に搬送する搬送装置内に穀稈が無い場合には、前記刈取装置(3)の駆動を停止させた後に、前記走行装置(2)の走行を停止させ、
前記コントローラ(40)は、前記コンバインの自動操舵中に、前記引起装置内に穀稈が無く、前記搬送装置内に穀稈が有る場合には、前記走行装置(2)の走行を停止させた後に、前記刈取装置(3)の駆動を停止させることを特徴とする穀稈の刈取作業方法。
続きを表示(約 610 文字)
【請求項2】
前記コントローラ(40)は、前記刈取装置(3)が穀稈を刈取る作業姿勢から待避姿勢に上昇している場合には、前記走行装置(2)の走行を停止させる請求項1記載の穀稈の刈取作業方法。
【請求項3】
前記コントローラ(40)は、前記コンバインを監視する基地局(22)との通信に通信障害が発生した場合には、前記走行装置(2)の走行を停止させる請求項1記載の穀稈の刈取作業方法。
【請求項4】
前記走行装置(2)の走行を停止させる前に、前記走行装置(2)の走行速度を減速し、前記走行装置(2)が予め設定した設定距離走行させる請求項1~3のいずれか1項に記載の穀稈の刈取作業方法。
【請求項5】
前記走行装置(2)の走行を停止させる前に、前記走行装置(2)の走行速度を減速し、前記走行装置(2)が予め設定した設定時間走行させる請求項1~3のいずれか1項に記載の穀稈の刈取作業方法。
【請求項6】
前記コントローラ(40)は、前記コンバインがグレンタンク(7)内の穀粒を排出する排出位置(54)に到着するまでの第1到着時間(T1)が、前記コンバインを監視する基地局(22)から送信される搬送車両が排出位置(54)に到着するまでの第2到着時間(T2)よりも短い場合には、前記走行装置(2)の走行速度を減速させる請求項1記載の穀稈の刈取作業方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動操舵されるコンバインによる穀稈の刈取作業方法に関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、穀稈の刈取作業方法では、予め設定された設定経路に沿って自動操舵されるコンバインのエンジンに過度な負荷が加わるのを抑制してエンジンが作動不良に陥るのを防止する技術が知られている。(特許文献1)
【先行技術文献】
【特許文献】
【0003】
特開2023-161275号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の穀稈の刈取作業方法では、測位衛星から位置情報の受信する時間に遅れが有るために、実際の圃場に植立された条長さと設定経路の条長さの間に、大きなズレが発生した場合には、自動操作されているコンバインが圃場を区画する畦等に接触する恐れがあった。
【0005】
そこで、本発明は、自動操作されているコンバインが圃場を区画する畦等に接触するのを防止することができる穀稈の刈取作業方法を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決した本発明は次のとおりである。
すなわち、請求項1記載の発明は、エンジン(E)を搭載した機体フレーム(1)の下側に圃場を走行する走行装置(2)と、該機体フレーム(1)の前側に穀稈を刈取る刈取装置(3)と、該刈取装置(3)の後方左側に脱穀処理を行う脱穀装置(4)と、前記刈取装置(3)の後方右側に作業者が搭乗する操縦部(5)と、該操縦部(5)の後側にグレンタンク(7)を設けたコンバインを使用して圃場の穀稈を刈取る穀稈の刈取作業方法において、
前記操縦部(5)にコンバインを自動操舵させる設定経路(55,56)を設定するコントローラ(40)を設け、前記コントローラ(40)は、前記コンバインの自動操舵中に、前記刈取装置(3)の穀稈を引起す引起装置内に穀稈が無く、前記刈取装置(3)の穀稈を脱穀装置(4)に搬送する搬送装置内に穀稈が無い場合には、前記刈取装置(3)の駆動を停止させた後に、前記走行装置(2)の走行を停止させ、前記コントローラ(40)は、前記コンバインの自動操舵中に、前記引起装置内に穀稈が無く、前記搬送装置内に穀稈が有る場合には、前記走行装置(2)の走行を停止させた後に、前記刈取装置(3)の駆動を停止させることを特徴とする穀稈の刈取作業方法である。
【0007】
請求項2記載の発明は、前記コントローラ(40)は、前記刈取装置(3)が穀稈を刈取る作業姿勢から待避姿勢に上昇している場合には、前記走行装置(2)の走行を停止させる請求項1記載の穀稈の刈取作業方法である。
【0008】
請求項3記載の発明は、前記コントローラ(40)は、前記コンバインを監視する基地局(22)との通信に通信障害が発生した場合には、前記走行装置(2)の走行を停止させる請求項1記載の穀稈の刈取作業方法である。
【0009】
請求項4記載の発明は、前記走行装置(2)の走行を停止させる前に、前記走行装置(2)の走行速度を減速し、前記走行装置(2)が予め設定した設定距離走行させる請求項1~3のいずれか1項に記載の穀稈の刈取作業方法である。
【0010】
請求項5記載の発明は、前記走行装置(2)の走行を停止させる前に、前記走行装置(2)の走行速度を減速し、前記走行装置(2)が予め設定した設定時間走行させる請求項1~3のいずれか1項に記載の穀稈の刈取作業方法である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
田植え機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
3日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
エンジン
3日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
3日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ