TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025091667
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207061
出願日
2023-12-07
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20250612BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
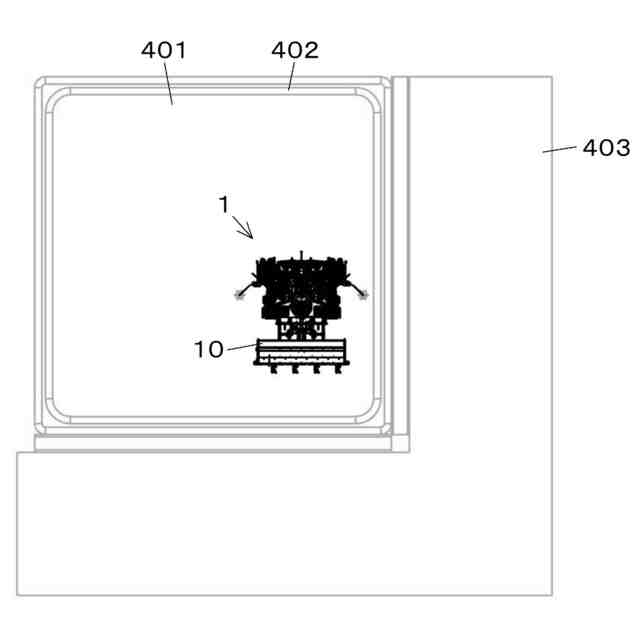
【課題】従来の構成に比べて、畦や道路の位置を精度良く計測すること。
【解決手段】圃場(401)とは高さが異なり且つ地図データにおいて圃場(401)の外縁部に沿って連続的な長さを有する畦(402)を判別手段(305)で判別し、判別手段(305)で判別された畦(402)の位置に基づいて、地図データにおける畦(402)の位置を更新手段(306)で更新することで、従来の構成に比べて、畦や道路の位置を精度良く計測することができる。
【選択図】図6
特許請求の範囲
【請求項1】
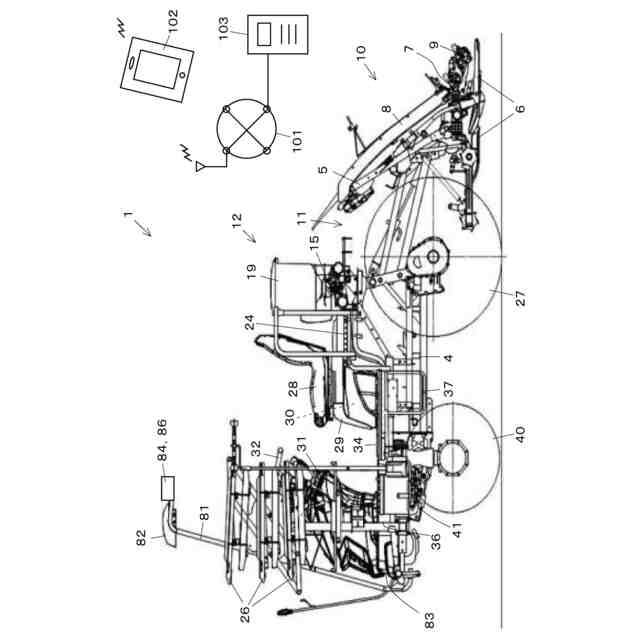
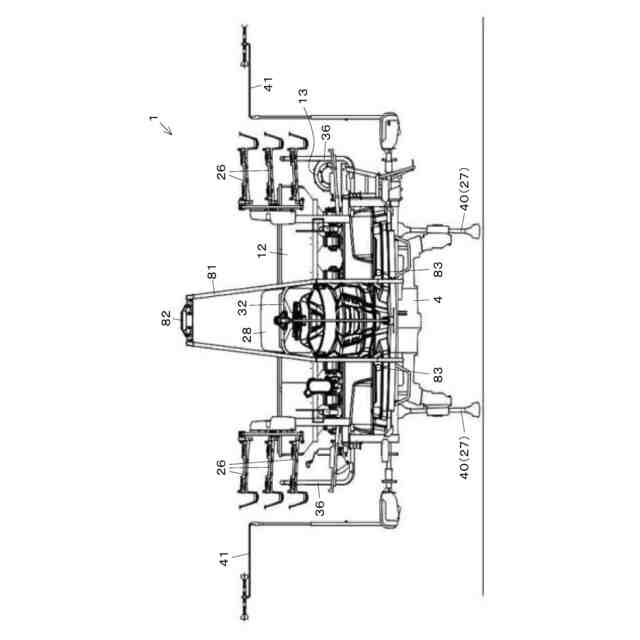
走行車体(4)に設けられて圃場に作物を移植する作業機(10)と、
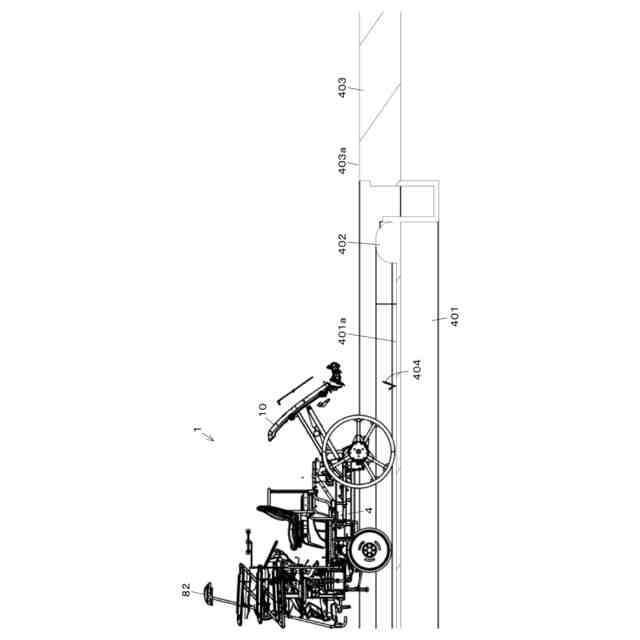
前記走行車体(4)に支持され且つ前記走行車体(4)の外部の物体および圃場面(401a)までの距離を計測する測距装置(83)と、
圃場(401)と圃場外の道路(403)とを含む地図データと、前記測距装置(83)での距離の計測結果と、に基づいて、前記圃場(401)とは高さが異なり且つ前記地図データにおいて前記圃場(401)の外縁部に沿って連続的な長さを有する畦(402)、を判別する判別手段(305)と、
前記判別手段(305)で判別された前記畦(402)の位置に基づいて、前記地図データにおける前記畦(402)の位置を更新する更新手段(306)と、
を備えたことを特徴とする作業車両。
続きを表示(約 730 文字)
【請求項2】
前記判別手段(305)で判別された前記畦(402)の位置に基づいて、前記畦(402)の手前で旋回可能な位置を算出する旋回位置算出手段(310a)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記走行車体(4)に支持され且つ前記走行車体(4)の外部を撮像して外部の物体を検出する撮像装置(84,86)と、
前記撮像装置(84,86)での検出結果に基づいて、圃場(401)に移植された作物(404)の高さと作物(404)の位置を判別する作物判別手段(308)と、
前記作物(404)の高さに基づいて作物(404)の倒伏状態を判別すると共に、前記作物(404)の位置に基づいて欠株状態を判別する作物状態判別手段(309)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項4】
前記走行車体(4)の現在位置を計測する測位装置(82)と、
前記走行車体(4)に支持され且つ前記走行車体(4)の外部を撮像して外部の物体を検出する撮像装置(84,86)と、
前記走行車体(4)に支持され且つ前記圃場面(401a)に接触して、前記走行車体(4)の走行に伴ってマーカ跡を形成するマーカ(41)と、
前記測位装置(82)での計測が不能になった場合に、前記撮像装置(84,86)および前記測距装置(83)の少なくとも一方での前記マーカ跡の検出結果に基づいて、前記マーカ跡を基準とする走行経路に沿って前記走行車体(4)を自律走行させる自律走行制御手段(303)と、
を備えたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、苗移植機等の作物を圃場に移植する作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
圃場に苗を移植する作業車両において、作業機の周囲の障害物との距離をミリ波レーダや赤外線レーダ、ステレオカメラで計測して、障害物を回避する技術が公知である(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2019-129760号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、ミリ波レーダーを使用して障害物や稲、穀稈等の検出も行うことが可能であるが、圃場面や畦、道路等の検出は行われていない。
畦は、人が畦際を歩く際に変形したり、損壊することがあったり、変形、損壊した部分を補修する際に、元の状態とは異なる状態になっている事がある。また、道路も舗装されていない道では、道路際の一部が損壊したり補修したりされていることがあり、地図データとは異なる部分が存在する場合がある。したがって、畦や道路は、登録されている地図情報と、実際の状態との間で差が存在することがある。よって、地図情報に基づいて自動走行を行う場合に、旋回時に、地図情報とは異なっている畦や道路に車体の一部が接触して、畦や道路を損壊させたり、作業車両が損壊したり、旋回が予定通りにできず圃場を荒らしてしまったり、等の問題が発生する恐れがある。
【0005】
本発明は、従来の構成に比べて、畦や道路の位置を精度良く計測することを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、走行車体(4)に設けられて圃場に作物を移植する作業機(10)と、前記走行車体(4)に支持され且つ前記走行車体(4)の外部の物体および圃場面(401a)までの距離を計測する測距装置(83)と、前記圃場(401)と前記圃場外の道路(403)とを含む地図データと、前記測距装置(83)での距離の計測結果と、に基づいて、前記圃場(401)とは高さが異なり且つ前記地図データにおいて前記圃場(401)の外縁部に沿って連続的な長さを有する前記畦(402)、を判別する判別手段(305)と、前記判別手段(305)で判別された前記畦(402)の位置に基づいて、前記地図データにおける畦(402)の位置を更新する更新手段(306)と、を備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記判別手段(305)で判別された前記畦(402)の位置に基づいて、前記畦(402)の手前で旋回可能な位置を算出する旋回位置算出手段(310a)を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記走行車体(4)に支持され且つ前記走行車体(4)の外部を撮像して外部の物体を検出する撮像装置(84,86)と、前記撮像装置(84,86)での検出結果に基づいて、圃場(401)に移植された作物(404)の高さと作物(404)の位置を判別する作物判別手段(308)と、前記作物(404)の高さに基づいて作物(404)の倒伏状態を判別すると共に、前記作物(404)の位置に基づいて欠株状態を判別する作物状態判別手段(309)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記走行車体(4)の現在位置を計測する測位装置(82)と、前記走行車体(4)に支持され且つ前記走行車体(4)の外部を撮像して外部の物体を検出する撮像装置(84,86)と、前記走行車体(4)に支持され且つ前記圃場面(401a)に接触して、前記走行車体(4)の走行に伴ってマーカ跡を形成するマーカ(41)と、前記測位装置(82)での計測が不能になった場合に、前記撮像装置(84,86)および前記測距装置(83)の少なくとも一方での前記マーカ跡の検出結果に基づいて、前記マーカ跡を基準とする走行経路に沿って前記走行車体(4)を自律走行させる自律走行制御手段(303)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【発明の効果】
【0010】
請求項1記載の発明によれば、圃場(401)とは高さが異なり且つ地図データにおいて圃場(401)の外縁部に沿って連続的な長さを有する畦(402)を判別手段(305)で判別し、判別手段(305)で判別された畦(402)の位置に基づいて、地図データにおける畦(402)の位置を更新手段(306)で更新することで、従来の構成に比べて、畦や道路の位置を精度良く計測することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ