TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079885
公報種別
公開特許公報(A)
公開日
2025-05-23
出願番号
2023192735
出願日
2023-11-13
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
63/10 20060101AFI20250516BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】従来の技術に比べて、電動モータの過負荷や電力の過剰な消費を抑制すること。
【解決手段】第2の電動機(52)の負荷が増大し且つ第2の電動機(52)の負荷の変化量が予め定められた規定値に達しない場合に、走行速度の増加の入力がされても走行速度の増加を抑制すると共に、第2の電動機(52)の負荷の変化量が規定値に達する場合に走行速度を減速させることで、従来の技術に比べて、電動モータの過負荷や電力の過剰な消費を抑制することができる。
【選択図】図6
特許請求の範囲
【請求項1】
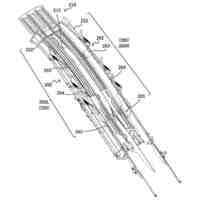
車両本体(1a)と、
前記車両本体(1a)に支持されて、前記車両本体(1a)を走行させる走行装置(2,3)と、
前記車両本体(1a)に支持されて、圃場に対する作業を行う作業機(18)と、
前記走行装置(2,3)を駆動する第1の電動機(4)と、
前記作業機(18)を駆動する第2の電動機(52)と、
前記第2の電動機(52)の負荷を検出する負荷検出器(SN1)と、
前記走行装置(2,3)の走行速度に基づいて前記第1の電動機(4)を制御する制御手段(83)であって、前記負荷検出器(SN1)の検出結果から前記第2の電動機(52)の負荷が増大し且つ前記第2の電動機(52)の負荷の変化量が予め定められた規定値(k)に達しない場合には、前記走行速度の増加の入力がされても前記走行速度の増加を抑制すると共に、前記第2の電動機(52)の負荷の変化量が前記規定値(k)に達する場合には、前記走行速度を減速させる前記制御手段(83)と、
を備えたことを特徴とする作業車両。
続きを表示(約 1,000 文字)
【請求項2】
前記第2の電動機(52)の負荷に応じた前記第2の電動機(52)の負荷電流値を検出する前記負荷検出器(SN1)と、
前記負荷電流値と、予め定められた比例定数(Kp)と、予め定められた積分定数(Ki)とに基づくPI制御で前記第1の電動機(4)を制御する前記制御手段(83)であって、前記PI制御で算出された前記第1の電動機(4)の制御値を基準として、前記走行速度の増加の抑制量(x)を設定する前記制御手段(83)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記負荷電流値の単位時間当たりの変化量の大きさ(V)に前記走行速度の増加の抑制量(x)を比例させ、前記変化量の大きさ(V)が前記規定値(k)に達する場合は、抑制量(x)を上限値とする
ことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記第2の電動機(52)の負荷に応じた前記第2の電動機(52)の回転数の変化を検出する前記負荷検出器と、
前記回転数の値と、予め定められた比例定数(Kp)と、予め定められた積分定数(Ki)とに基づくPI制御で前記第1の電動機(4)を制御する前記制御手段(83)であって、前記PI制御で算出された前記第1の電動機(4)の制御値を基準として、前記走行速度の増加の抑制量を設定する前記制御手段(83)と、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項5】
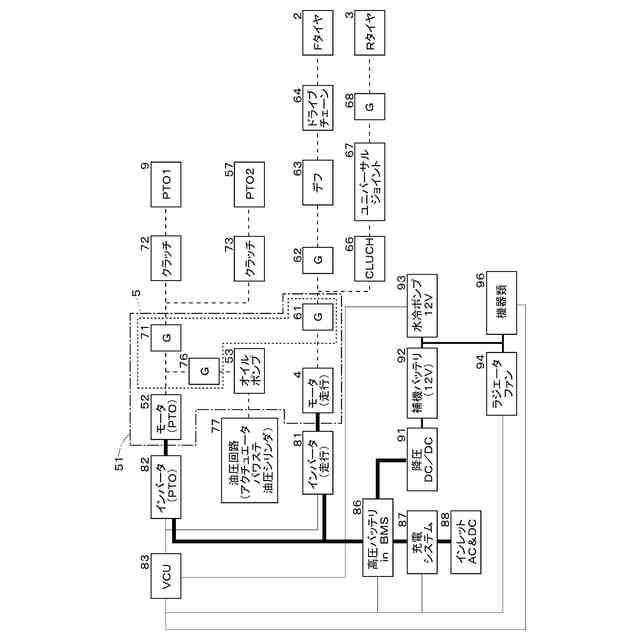
前記第1の電動機(4)および前記第2の電動機(52)に給電するバッテリ(86)と、
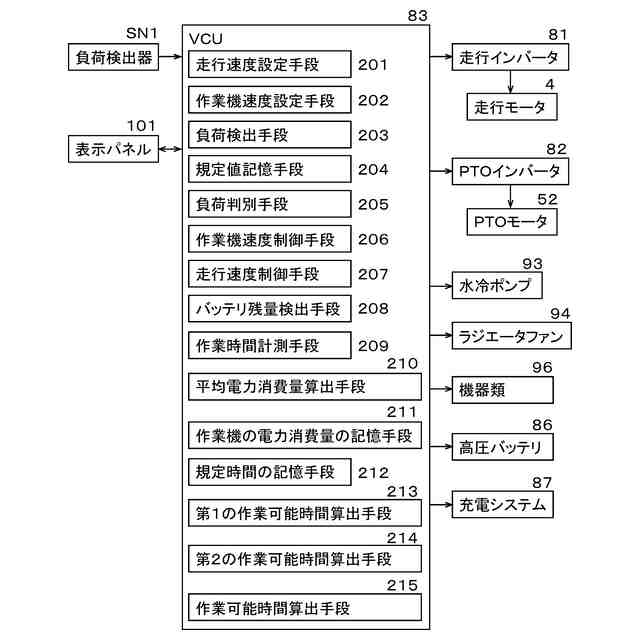
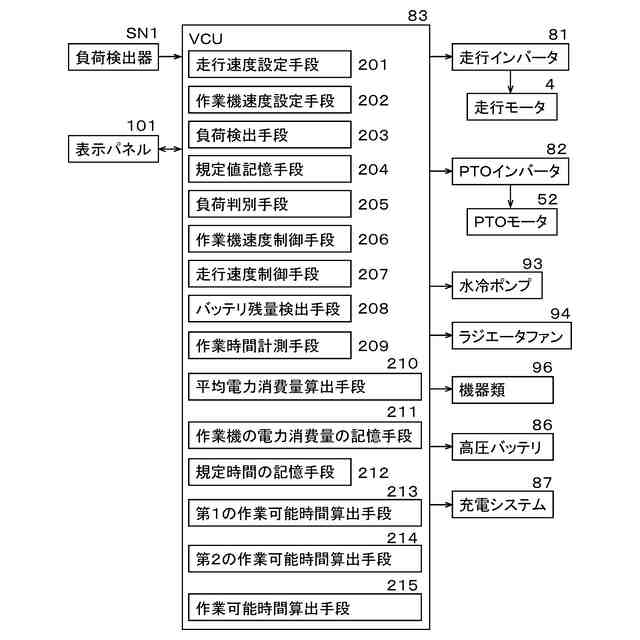
作業開始から現時点までの平均電力消費量(Va)と前記バッテリ(86)の残りの電力量(V1)に基づいて計算される第1の作業可能時間をT1とし、前記車両本体(1a)に装着された前記作業機(18)に対して予め定められた電力消費量(Vb)と前記残りの電力量(V1)とに基づいて計算される第2の作業可能時間をT2とし、作業開始から現時点までの経過時間をT3とし、前記第1の作業可能時間(T1)の計算が安定するまでの予め定められた規定時間をT4とし、残りの作業可能時間をTaとした場合に、Ta=(T3/T4)×T1+(1-T3/T4)×T2で計算する前記制御手段(83)と、
を備えたことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関し、特に、走行装置や作業機を電動で駆動する作業車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
走行装置を備えた電動の車両において、電動モータに流れる電流値を検出することで、ロータリ耕耘装置の接地の有無を判断し、ロータリ耕耘装置が上側の非作業位置から下側の作業位置に下降される場合に、電流値の検出結果からロータリ耕耘装置が接地したと判断されると、PTO軸の回転速度が所定値まで無段階で徐々に上昇するように電動モータを制御する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第5798053号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の従来技術では、走行と作業機を1つの電動モータで駆動しており、接地で作業機の負荷が上昇しても走行速度が低下しないように、電動モータを増速する制御を行っている。この制御では、走行速度を優先しており、作業機の実際の負荷に対して大きく余裕のあるように制御される。すなわち、作業機の実際の負荷に対してオーバーロード(過負荷)の状態で電動モータが駆動される状態で制御される。したがって、電力のロス(無駄な消費)が多かったり、電動モータが過負荷で故障しやすかったり寿命が短くなったりする等の問題がある。
【0005】
本発明は、従来の技術に比べて、電動モータの過負荷や電力の過剰な消費を抑制することを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、車両本体(1a)と、前記車両本体(1a)に支持されて、前記車両本体(1a)を走行させる走行装置(2,3)と、前記車両本体(1a)に支持されて、圃場に対する作業を行う作業機(18)と、前記走行装置(2,3)を駆動する第1の電動機(4)と、前記作業機(18)を駆動する第2の電動機(52)と、前記第2の電動機(52)の負荷を検出する負荷検出器(SN1)と、前記走行装置(2,3)の走行速度に基づいて前記第1の電動機(4)を制御する制御手段(83)であって、前記負荷検出器(SN1)の検出結果から前記第2の電動機(52)の負荷が増大し且つ前記第2の電動機(52)の負荷の変化量が予め定められた規定値(k)に達しない場合には、前記走行速度の増加の入力がされても前記走行速度の増加を抑制すると共に、前記第2の電動機(52)の負荷の変化量が前記規定値(k)に達する場合には、前記走行速度を減速させる前記制御手段(83)と、を備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記第2の電動機(52)の負荷に応じた前記第2の電動機(52)の負荷電流値を検出する前記負荷検出器(SN1)と、前記負荷電流値と、予め定められた比例定数(Kp)と、予め定められた積分定数(Ki)とに基づくPI制御で前記第1の電動機(4)を制御する前記制御手段(83)であって、前記PI制御で算出された前記第1の電動機(4)の制御値を基準として、前記走行速度の増加の抑制量(x)を設定する前記制御手段(83)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記負荷電流値の単位時間当たりの変化量の大きさ(V)に前記走行速度の増加の抑制量(x)を比例させ、前記変化量の大きさ(V)が前記規定値(k)に達する場合は、抑制量(x)を上限値とすることを特徴とする請求項2に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記第2の電動機(52)の負荷に応じた前記第2の電動機(52)の回転数の変化を検出する前記負荷検出器と、前記回転数の値と、予め定められた比例定数(Kp)と、予め定められた積分定数(Ki)とに基づくPI制御で前記第1の電動機(4)を制御する前記制御手段(83)であって、前記PI制御で算出された前記第1の電動機(4)の制御値を基準として、前記走行速度の増加の抑制量を設定する前記制御手段(83)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【0010】
請求項5に記載の発明は、前記第1の電動機(4)および前記第2の電動機(52)に給電するバッテリ(86)と、作業開始から現時点までの平均電力消費量(Va)と前記バッテリ(86)の残りの電力量(V1)に基づいて計算される第1の作業可能時間をT1とし、前記車両本体(1a)に装着された前記作業機(18)に対して予め定められた電力消費量(Vb)と前記残りの電力量(V1)とに基づいて計算される第2の作業可能時間をT2とし、作業開始から現時点までの経過時間をT3とし、前記第1の作業可能時間(T1)の計算が安定するまでの予め定められた規定時間をT4とし、残りの作業可能時間をTaとした場合に、Ta=(T3/T4)×T1+(1-T3/T4)×T2で計算する前記制御手段(83)と、を備えたことを特徴とする請求項1に記載の作業車両である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ルアー
28日前
個人
播種装置
25日前
個人
植物栽培用培地
5日前
個人
虫の生け捕り具
13日前
個人
プランターセット
1か月前
個人
釣り仕掛け処理具
今日
個人
植木鉢用台
1日前
個人
養殖システム
20日前
株式会社シマノ
釣竿
21日前
岡部株式会社
浮魚礁
13日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
収穫作業車両
14日前
個人
苔玉スタンド
1日前
個人
漁業支援装置及び方法
26日前
中国電力株式会社
巣撤去具
11日前
株式会社シマノ
ルアー
6日前
松山株式会社
農作業機
1日前
ウエダ産業株式会社
切断装置
21日前
松山株式会社
農作業機
1日前
松山株式会社
農作業機
1日前
鹿島建設株式会社
レインガーデン
29日前
第一衛材株式会社
ペット用おむつ
11日前
個人
落口枡用取付部材及び落口枡
29日前
OTIS株式会社
ルアー用スカート
25日前
個人
大型ペット用安定供給水やりシステム
8日前
株式会社ササキコーポレーション
農作業機
27日前
有限会社東北マシン・テクノ
穴開け装置
7日前
株式会社クボタ
圃場作業機
20日前
株式会社シマノ
ルアー
6日前
株式会社トクイテン
青果物収穫装置
14日前
株式会社タカミヤ
台車用レール構造
26日前
株式会社シマノ
ルアー
27日前
合同会社館山水庭
水耕栽培用植栽兼収穫装置
5日前
株式会社ヤマナカ
果実棚装置
7日前
トヨタ自動車株式会社
走行式草刈機
15日前
ヤンマーホールディングス株式会社
苗移植機
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ