TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085459
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199350
出願日
2023-11-24
発明の名称
自動走行制御システムおよび作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250529BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行における作業走行を効率的に行うことを目的とする。
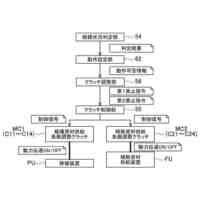
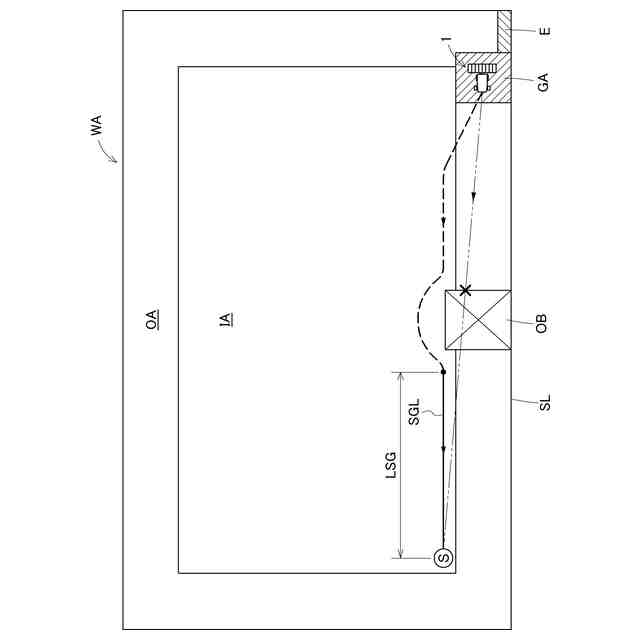
【解決手段】圃場マップFMに基づいて、外周領域と内部領域とを有する作業領域を設定する作業領域設定部34と、外周領域を周回走行するための目標走行経路である周回経路OL、および、内部領域を往復走行するための目標走行経路である内部往復経路IPLを生成する走行経路生成部37と、周回経路OLの周回数を選択する選択操作を受け付ける周回数選択部35とを備え、走行経路生成部37は、周回数選択部35が受け付けた周回数の周回経路OLを生成する。
【選択図】図5
特許請求の範囲
【請求項1】
圃場の外周に沿う外周領域と前記外周領域の内側の内部領域とを目標走行経路に沿って自動走行する作業車の自動走行制御システムであって、
前記圃場に関する情報を有する圃場マップを取得するマップ取得部と、
前記圃場マップに基づいて、前記外周領域と前記内部領域とを有する作業領域を設定する作業領域設定部と、
前記外周領域を周回走行するための前記目標走行経路である周回経路、および、前記内部領域を往復走行するための前記目標走行経路である内部往復経路を生成する走行経路生成部と、
前記周回経路の周回数を選択する選択操作を受け付ける周回数選択部とを備え、
前記走行経路生成部は、前記周回数選択部が受け付けた前記周回数の前記周回経路を生成する自動走行制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記圃場の外周辺のうちから前記内部領域を前記往復走行する際の旋回辺を設定する旋回辺設定部と、
前記旋回辺を所定の距離だけ前記圃場の内側に移動させた直線である第1境界線を設定する境界線設定部とをさらに備え、
前記作業領域設定部は、前記旋回辺以外の前記外周辺および前記第1境界線で囲まれた領域を前記作業領域として設定する請求項1に記載の自動走行制御システム。
【請求項3】
前記境界線設定部は、前記外周辺を前記圃場の内側に移動させて第2境界線を設定すると共に、前記旋回辺に沿う前記第2境界線を前記距離だけ前記圃場の内側に平行移動させて前記第1境界線を設定し、
前記作業領域設定部は、前記旋回辺以外の前記外周辺に沿う前記第2境界線、および前記第1境界線で囲まれた領域を前記作業領域として設定する請求項2に記載の自動走行制御システム。
【請求項4】
前記周回数選択部は、前記周回数として、1周または2周の選択を受け付ける請求項1に記載の自動走行制御システム。
【請求項5】
所定の報知を行う報知部をさらに備え、
前記周回数選択部は、前記圃場の外形形状が矩形状でない場合に、前記周回数として2周以上を選択することを推奨する報知を前記報知部に行わせる請求項1に記載の自動走行制御システム。
【請求項6】
前記走行経路生成部は、前記圃場の外形形状が矩形状でない場合に、前記作業車が有する前輪が前記外周領域から外側にはみ出ない前記内部往復経路における旋回経路を生成する請求項1に記載の自動走行制御システム。
【請求項7】
前記往復走行において、前記旋回辺の少なくともいずれかの作業終了点で一時停車をするか前記一時停車をしないかを選択する操作を受け付ける停車選択部と、
前記一時停車をした場合に、直進走行を継続する追加作業走行を行うか、前記往復走行を継続するかを選択する操作を受け付ける走行選択部と、
前記一時停車および前記追加作業走行を含む前記自動走行を制御する自動走行制御部とを備える請求項2に記載の自動走行制御システム。
【請求項8】
前記一時停車は前記内部領域と前記外周領域との境界線で行われる請求項7に記載の自動走行制御システム。
【請求項9】
請求項1から8のいずれか一項に記載の自動走行制御システムを備える作業車。
【請求項10】
前記圃場に植え付ける苗を保持する苗載せ台と、
予備苗を収納する予備苗収納装置とを備え、
前記圃場は、前記外周領域より外側に畦を有し、
前記走行経路生成部は、前記周回数として1周が選択された場合、前記苗載せ台と前記予備苗収納装置とが前記畦に接触しないように前記内部往復経路を生成する請求項9に記載の作業車。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場の内部領域を往復走行し、圃場の外周領域を周回走行する作業車、および作業車の自動走行制御システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
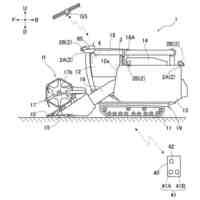
特許文献1に開示されるように、乗用田植機(作業車)は、圃場の外周領域において、あらかじめ設定された周回数の周回走行を行う。外周領域は内部領域の往復走行における旋回領域となる。
【先行技術文献】
【特許文献】
【0003】
特開2020-099269号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、少ない周回数で周回走行を行うと外周領域の幅が狭くなり、内部領域の往復走行における旋回走行が適切にできない場合がある。逆に、周回数を多くしすぎると、内部領域の往復走行に比べて手間のかかる外周走行が多くなり、圃場全体における自動走行による効率的な作業走行が阻害される。
【0005】
本発明は、自動走行における作業走行を効率的に行うことを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一実施形態に係る自動走行制御システムは、圃場の外周に沿う外周領域と前記外周領域の内側の内部領域とを目標走行経路に沿って自動走行する作業車の自動走行制御システムであって、前記圃場に関する情報を有する圃場マップを取得するマップ取得部と、前記圃場マップに基づいて、前記外周領域と前記内部領域とを有する作業領域を設定する作業領域設定部と、前記外周領域を周回走行するための前記目標走行経路である周回経路、および、前記内部領域を往復走行するための前記目標走行経路である内部往復経路を生成する走行経路生成部と、前記周回経路の周回数を選択する選択操作を受け付ける周回数選択部とを備え、前記走行経路生成部は、前記周回数選択部が受け付けた前記周回数の前記周回経路を生成する。
【0007】
このような構成により、外周領域の周回数を任意に選択することができる。そのため、圃場の状態や作業の状態等を考慮して、往復走行における旋回走行を適切に行うことが容易となると共に、往復走行を行う内部領域を広くして、自動走行における作業走行を効率的に行うことができる。
【0008】
また、前記圃場の外周辺のうちから前記内部領域を前記往復走行する際の旋回辺を設定する旋回辺設定部と、前記旋回辺を所定の距離だけ前記圃場の内側に移動させた直線である第1境界線を設定する境界線設定部とをさらに備え、前記作業領域設定部は、前記旋回辺以外の前記外周辺および前記第1境界線で囲まれた領域を前記作業領域として設定してもよい。
【0009】
このような構成により、旋回辺を圃場の内側にオフセットして第1境界線が設定され、第1境界線より内側が内部領域として設定される。これにより、圃場の外周に畦等の障害物が存在する場合であっても、旋回の際に機体が障害物と接触することを抑制することができる。
【0010】
また、前記境界線設定部は、前記外周辺を前記圃場の内側に移動させて第2境界線を設定すると共に、前記旋回辺に沿う前記第2境界線を前記距離だけ前記圃場の内側に平行移動させて前記第1境界線を設定し、前記作業領域設定部は、前記旋回辺以外の前記外周辺に沿う前記第2境界線、および前記第1境界線で囲まれた領域を前記作業領域として設定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
9日前
株式会社クボタ
田植機
1か月前
株式会社クボタ
田植機
9日前
株式会社クボタ
移植機
9日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
23日前
株式会社クボタ
収穫機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
農業機械
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
圃場作業車
25日前
株式会社クボタケミックス
排水集合管
3日前
株式会社クボタ
多目的車両
18日前
株式会社クボタケミックス
排水集合管
2日前
株式会社クボタ
作物収穫機
1か月前
株式会社クボタケミックス
電気融着継手
11日前
株式会社クボタ
電動作業車両
18日前
株式会社クボタ
電動作業車両
25日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ