TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085461
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199352
出願日
2023-11-24
発明の名称
自動走行制御システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250529BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】適切に旋回走行を行い、容易かつ効率的に作業走行することを目的とする。
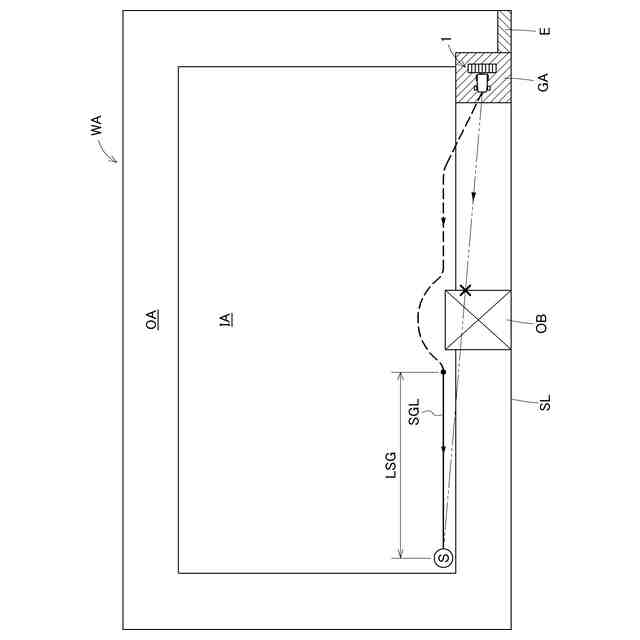
【解決手段】他方側に最も外側の作業走行経路LLの終了位置が圃場に設けられる出入り口と反対側となる場合、走行経路生成部37は、他方側に最も外側の作業走行経路LLから並び方向に1つ手前の作業走行経路LLを非作業走行経路としたうえで、他方側に最も外側の作業走行経路LLの後に、非作業走行経路とされた作業走行経路LLを走行する作業走行経路LLを生成し、非作業走行経路は作業走行経路LLより所定の長さだけ短く生成される。
【選択図】図14
特許請求の範囲
【請求項1】
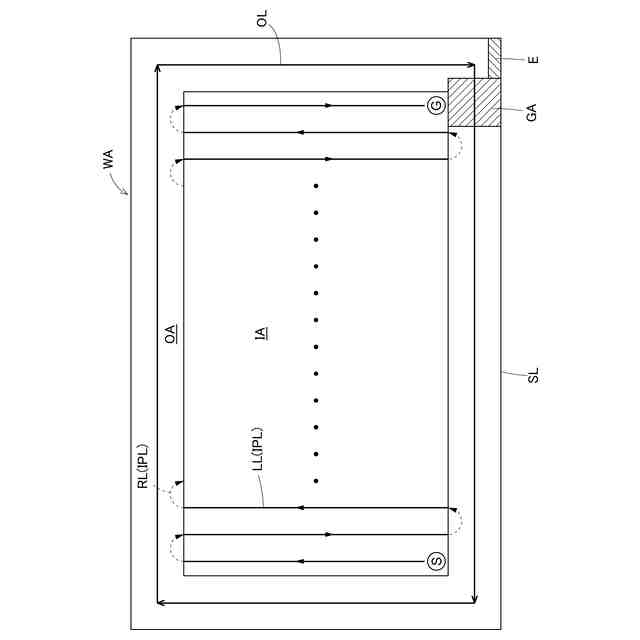
圃場の外周に沿う外周領域と前記外周領域の内側の内部領域とを目標走行経路に沿って自動走行する作業車の自動走行制御システムであって、
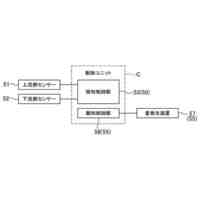
前記外周領域を周回走行するための前記目標走行経路である周回経路、および、前記内部領域を往復走行するための前記目標走行経路である内部往復経路を生成する走行経路生成部を備え、
前記内部往復経路は、前記内部領域の向かい合う2辺間を走行する作業走行経路と、隣り合う前記作業走行経路を繋ぐ旋回経路とを有し、前記往復走行は、前記旋回経路に沿った旋回走行を挟んで、前記作業走行経路の並び方向における一方側に最も外側の前記作業走行経路から他方側に最も外側の前記作業走行経路に向けて順に前記作業走行経路に沿って走行され、
他方側に最も外側の前記作業走行経路の終了位置が前記圃場に設けられる出入り口と反対側となる場合、前記走行経路生成部は、他方側に最も外側の前記作業走行経路から前記並び方向に1つ手前の前記作業走行経路を非作業走行経路としたうえで、他方側に最も外側の前記作業走行経路の後に、前記非作業走行経路とされた前記作業走行経路を走行する前記作業走行経路を生成し、前記非作業走行経路は前記作業走行経路より所定の長さだけ短く生成される自動走行制御システム。
続きを表示(約 790 文字)
【請求項2】
前記走行経路生成部は、前記非作業走行経路から他方側に最も外側の前記作業走行経路に至る前記旋回経路の後に、他方側に最も外側の前記作業走行経路の開始位置まで後進する後進経路を生成する請求項1に記載の自動走行制御システム。
【請求項3】
前記出入り口は他方側に最も外側の前記作業走行経路の終端部の近傍に設けられ、前記走行経路生成部は、前記出入り口の近傍に障害物がある場合に、前記非作業走行経路を前記作業走行経路より短く生成する請求項1に記載の自動走行制御システム。
【請求項4】
前記周回経路は、前記非作業走行経路とされた前記作業走行経路を走行した後に、前記出入り口の近傍から前記外周領域で前記圃場を周回して前記出入り口に至る経路である請求項2に記載の自動走行制御システム。
【請求項5】
前記長さは可変であり、
前記長さを人為的に設定する入力部をさらに備える請求項1に記載の自動走行制御システム。
【請求項6】
前記長さは、前記出入り口に設けられるスロープの大きさに応じて決まる請求項1に記載の自動走行制御システム。
【請求項7】
前記圃場の外周に沿った非作業走行によって圃場マップを生成するマップ取得部を備え、
前記マップ取得部は、前記非作業走行の始点から終点までの走行軌跡に基づいて矩形を近似して前記圃場の外形形状を生成し、前記走行軌跡から前記圃場の前記外形形状を除いた部分を前記スロープとして定義する請求項6に記載の自動走行制御システム。
【請求項8】
前記自動走行は、前記作業車に運転者が搭乗する有人自動走行および前記作業車に前記運転者が搭乗しない無人自動走行のいずれかで行うことができる請求項1から7のいずれか一項に記載の自動走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目標走行経路に沿って圃場を自動走行する作業車の自動走行制御システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に開示されるように、田植機(作業車)は、圃場の内部領域を内部往復経路に沿って往復走行する。効率的に作業走行を行うために、往復走行の開始点と終了点は圃場の同じ旋回辺側に位置することが好適である。そのため、内部往復経路の作業走行経路が奇数本である場合、作業走行経路の1つを非作業走行し、往復走行の最後に非作業走行した作業走行経路を作業走行する。往復走行の開始点と終了点は圃場の同じ旋回辺側に位置することができる。
【先行技術文献】
【特許文献】
【0003】
特開2021-108621号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
非作業走行を行った後の旋回走行において、旋回経路上に障害物が存在すると、旋回経路に沿った旋回走行を行うことができず、効率的に作業走行を行うことができない場合があった。
【0005】
本発明は、適切に旋回走行を行い、容易かつ効率的に作業走行することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一実施形態に係る自動走行制御システムは、圃場の外周に沿う外周領域と前記外周領域の内側の内部領域とを目標走行経路に沿って自動走行する作業車の自動走行制御システムであって、前記外周領域を周回走行するための前記目標走行経路である周回経路、および、前記内部領域を往復走行するための前記目標走行経路である内部往復経路を生成する走行経路生成部を備え、前記内部往復経路は、前記内部領域の向かい合う2辺間を走行する作業走行経路と、隣り合う前記作業走行経路を繋ぐ旋回経路とを有し、前記往復走行は、前記旋回経路に沿った旋回走行を挟んで、前記作業走行経路の並び方向における一方側に最も外側の前記作業走行経路から他方側に最も外側の前記作業走行経路に向けて順に前記作業走行経路に沿って走行され、他方側に最も外側の前記作業走行経路の終了位置が前記圃場に設けられる出入り口と反対側となる場合、前記走行経路生成部は、他方側に最も外側の前記作業走行経路から前記並び方向に1つ手前の前記作業走行経路を非作業走行経路としたうえで、他方側に最も外側の前記作業走行経路の後に、前記非作業走行経路とされた前記作業走行経路を走行する前記作業走行経路を生成し、前記非作業走行経路は前記作業走行経路より所定の長さだけ短く生成される。
【0007】
作業走行経路が奇数本である場合、一方側に最も外側の作業走行経路(最初の作業走行経路)の開始位置と、多方側に最も外側の作業走行経路(最終の作業走行経路)の終了位置とが圃場を挟んで反対側の旋回辺側に位置することとなる。圃場を効率的に作業走行するために、最初の作業走行経路の開始位置と最後に走行する作業走行経路の終了位置とが圃場の同じ旋回辺側に位置させることが好適である。そのために、最終の作業走行経路の手前の作業走行経路が非作業走行で走行され、最終の作業走行経路が作業走行された後に、非作業走行で走行した作業走行経路が最後に作業走行される。この際、非作業走行後の旋回経路上に障害物があると、適切に旋回走行を行うことができない。
【0008】
上記構成によると、非作業走行を行う作業走行経路を短くし、本来の旋回経路より手前で旋回走行を行うこととなるため、障害物を避けて旋回走行を行うことができる可能性が高まる。その結果、適切に旋回走行を行いながら、内部領域の全体を容易かつ効率的に作業走行することができる。
【0009】
また、前記走行経路生成部は、前記非作業走行経路から他方側に最も外側の前記作業走行経路に至る前記旋回経路の後に、他方側に最も外側の前記作業走行経路の開始位置まで後進する後進経路を生成してもよい。
【0010】
このような構成により、旋回後に最終の作業走行経路の開始点まで後進して、最終の作業走行経路の全工程を作業走行することができる。そして、最終の作業走行経路における作業走行後に、非作業走行を行った作業走行経路を作業走行するため、非作業走行を行った作業走行経路の全工程を作業走行することができる。その結果、適切に旋回走行を行いながら、内部領域の全体を容易かつ効率的に作業走行することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
4日前
株式会社クボタケミックス
管継手
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
田植機
23日前
株式会社クボタ
作業車
23日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車
2日前
株式会社クボタ
移植機
2日前
株式会社クボタ
田植機
2日前
株式会社クボタ
作業車
2日前
株式会社クボタ
田植機
1か月前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
作物収穫機
26日前
株式会社クボタ
圃場作業車
18日前
株式会社クボタ
コンバイン
29日前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
多目的車両
11日前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
電動作業車両
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ