TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025077846
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023190341
出願日
2023-11-07
発明の名称
作業車両
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
B60W
30/00 20060101AFI20250512BHJP(車両一般)
要約
【課題】自動運転及び遠隔運転において適切に作業車両の転倒を防止しつつ操作性を確保する。
【解決手段】作業車両1は、圃場に対して作業装置2にて作業を行うことを含む自動運転が可能な作業車両1において、前記自動運転時の第1閾値θ1と、遠隔操作装置90による遠隔運転時の第2閾値θ2とを設定する設定部61eと、前記作業車両1の傾斜角度が前記自動運転時に前記第1閾値θ1又は前記遠隔運転時に前記第2閾値θ2に達すると、当該作業車両1の走行を停止させる制御装置60と、を備える。
【選択図】図18
特許請求の範囲
【請求項1】
圃場に対して作業装置にて作業を行うことを含む自動運転が可能な作業車両において、
前記自動運転時の第1閾値と、遠隔操作装置による遠隔運転時の第2閾値とを設定する設定部と、
前記作業車両の傾斜角度が前記自動運転時に前記第1閾値又は前記遠隔運転時に前記第2閾値に達すると、当該作業車両の走行を停止させる制御装置と、
を備える作業車両。
続きを表示(約 860 文字)
【請求項2】
前記第2閾値は前記第1閾値よりも絶対値が大きい請求項1に記載の作業車両。
【請求項3】
前記第1閾値は前記第2閾値よりも絶対値が大きい請求項1に記載の作業車両。
【請求項4】
所定条件に基づいて前記第2閾値を変更する変更部を備える請求項2に記載の作業車両。
【請求項5】
所定条件に基づいて前記第1閾値を変更する変更部を備える請求項3に記載の作業車両。
【請求項6】
前記作業車両の傾斜角度が、前記変更部にて変更された前記第2閾値未満であれば、前記遠隔操作装置による遠隔運転にて傾斜状態の前記作業車両の走行を許可する遠隔走行許可部を備える請求項4に記載の作業車両。
【請求項7】
前記変更部は、前記所定条件として、前記遠隔操作装置からの制御信号の受信強度が所定値以上であれば前記第2閾値を絶対値が大きくなるように値を変更し、所定値未満であれば前記第2閾値を変更しない請求項4に記載の作業車両。
【請求項8】
前記変更部は、前記所定条件として、前記遠隔操作装置が前記作業車両の所定範囲内に位置する場合に前記第2閾値を絶対値が大きくなるように値を変更し、前記遠隔操作装置が前記作業車両の所定範囲外に位置する場合に前記第2閾値を変更しない請求項4に記載の作業車両。
【請求項9】
前記変更部は、前記所定条件として、前記遠隔操作装置が前記作業車両の所定範囲内で且つ当該作業車両よりも上り勾配側に位置する場合に前記第2閾値を絶対値が大きくなるように値を変更し、前記遠隔操作装置が前記作業車両の所定範囲内で且つ当該作業車両よりも下り勾配側に位置する場合に前記第2閾値を変更しない請求項8に記載の作業車両。
【請求項10】
前記変更部は、前記所定条件として、前記作業装置の種類に基づいて前記第2閾値を変更する請求項4に記載の作業車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場に対して農作業を行う作業車両に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1に開示された作業車両の転倒防止システムは、車両の車幅方向における傾斜角を検出する傾斜角センサと、車速を検出する車速センサと、車両の位置を検出する位置検出部と、記憶された走行予定経路に従って車両を自動走行させる制御部とを備え、制御部は、車速が大きいほど所定傾斜角を小さく設定し、傾斜角が所定傾斜角以上になると車両を停止させる転倒防止制御を自動運転の場合に実行し、手動運転の場合に転倒防止制御を実行しない。また、制御部は、遠隔操作装置による遠隔運転の場合にも、自動運転と同じ転倒防止制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2019-94035号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業車両の転倒防止システムは、自動運転又は遠隔運転の場合に転倒防止制御を実行するため、自動運転時に転倒防止制御により傾斜姿勢で停止された作業車両を遠隔運転に切り替えたとしても、転倒防止制御が有効であるため遠隔運転ができず、遠隔運転の操作性に劣るという問題がある。この場合には、ユーザが作業車両に搭乗して手動運転で作業車両を移動させる必要がある。
【0005】
そこで、本発明は、前記問題点に鑑み、自動運転及び遠隔運転において適切に作業車両の転倒を防止しつつ操作性を確保することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。
本発明の一態様に係る作業車両は、圃場に対して作業装置にて作業を行うことを含む自動運転が可能な作業車両において、前記自動運転時の第1閾値と、遠隔操作装置による遠隔運転時の第2閾値とを設定する設定部と、前記作業車両の傾斜角度が前記自動運転時に前記第1閾値又は前記遠隔運転時に前記第2閾値に達すると、当該作業車両の走行を停止させる制御装置と、を備える。
【発明の効果】
【0007】
本発明によれば、自動運転及び遠隔運転において適切に作業車両の転倒を防止しつつ操作性を確保することができる。
【図面の簡単な説明】
【0008】
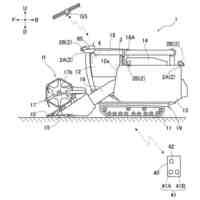
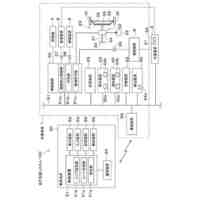
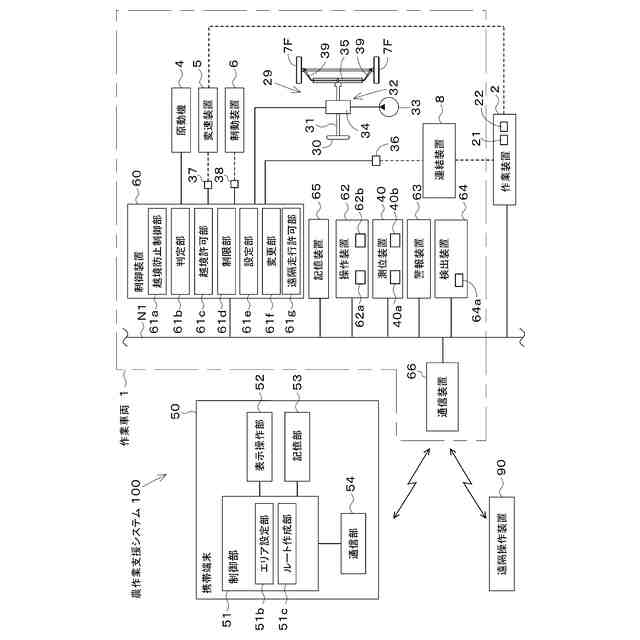
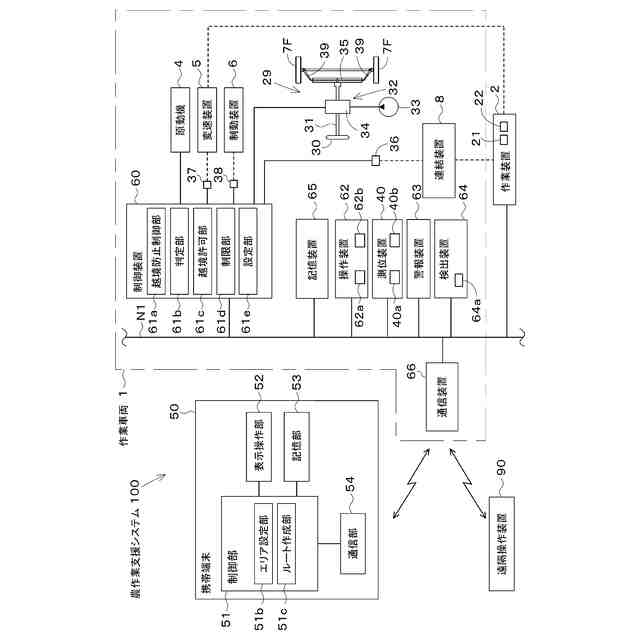
第1実施形態の農作業支援システムの構成図である。
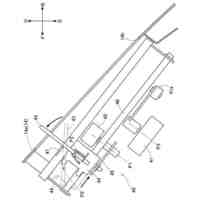
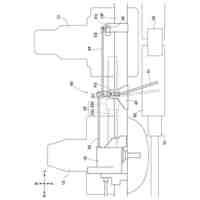
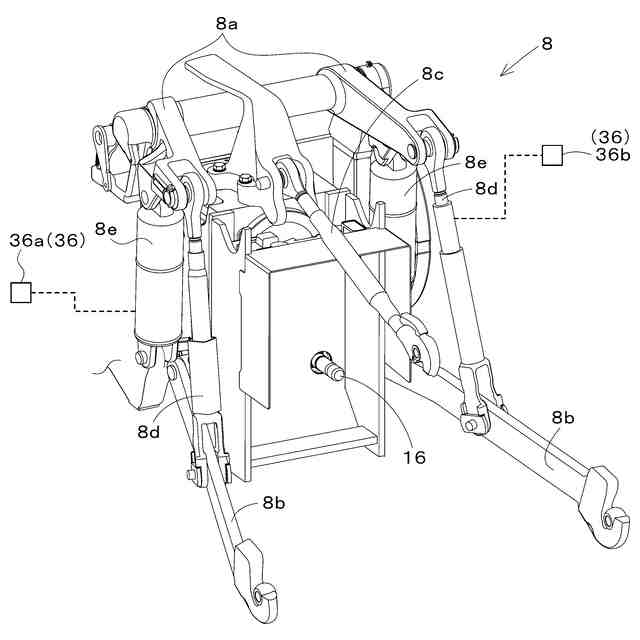
連結装置の斜視図である。
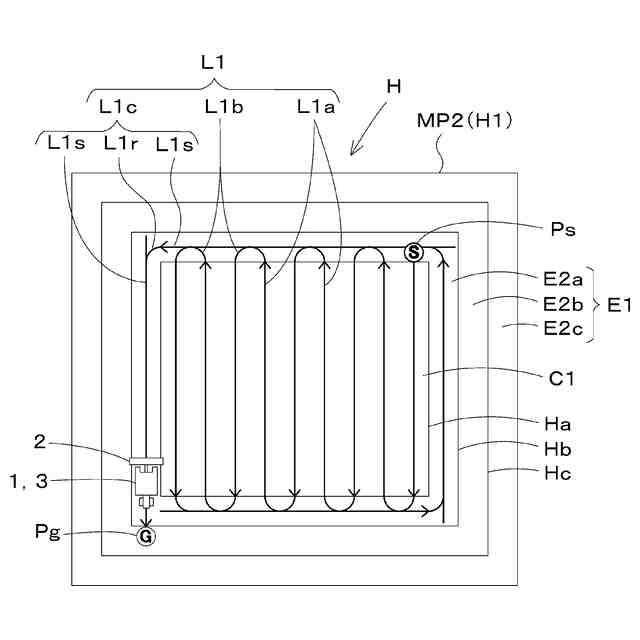
走行ルートの一例を示す図である。
走行制御画面の一例を示す図である。
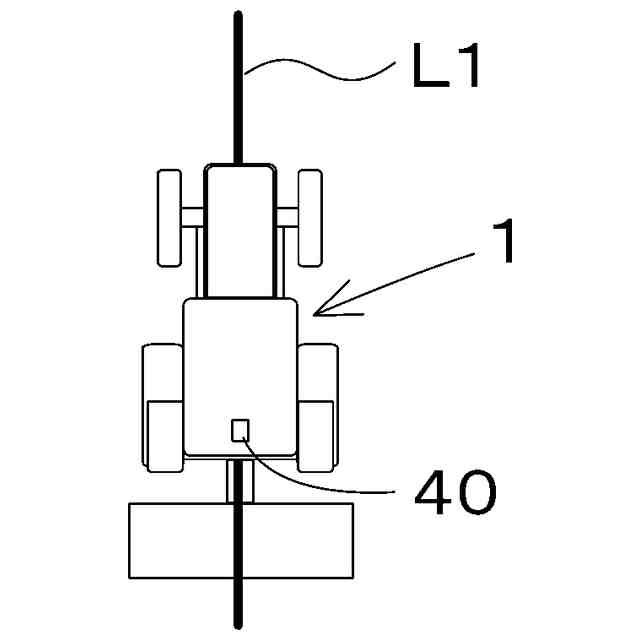
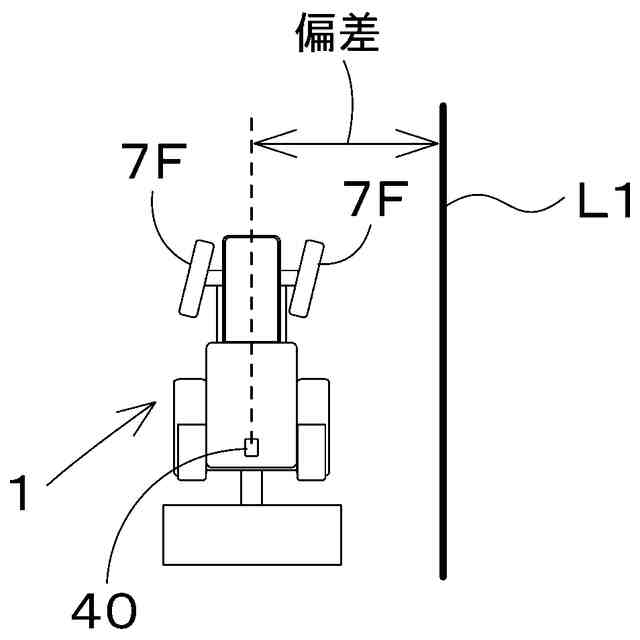
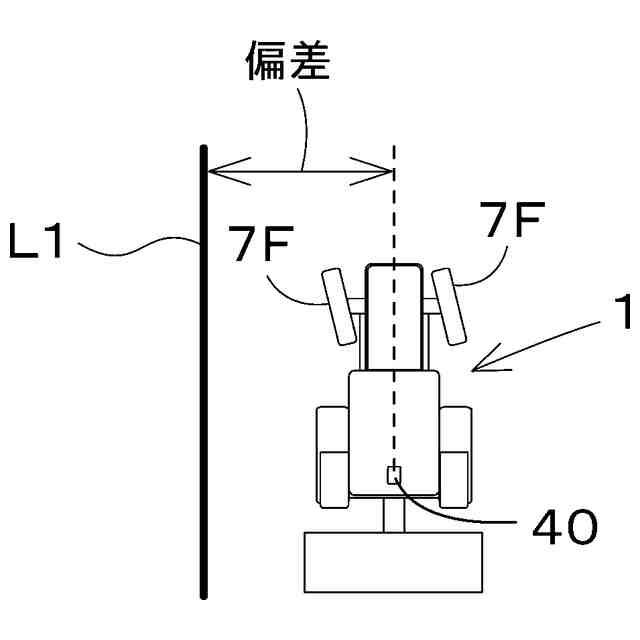
作業車両の自動運転を説明するための図である。
作業車両の自動運転を説明するための図である。
作業車両の自動運転を説明するための図である。
作業車両の自動運転を説明するための図である。
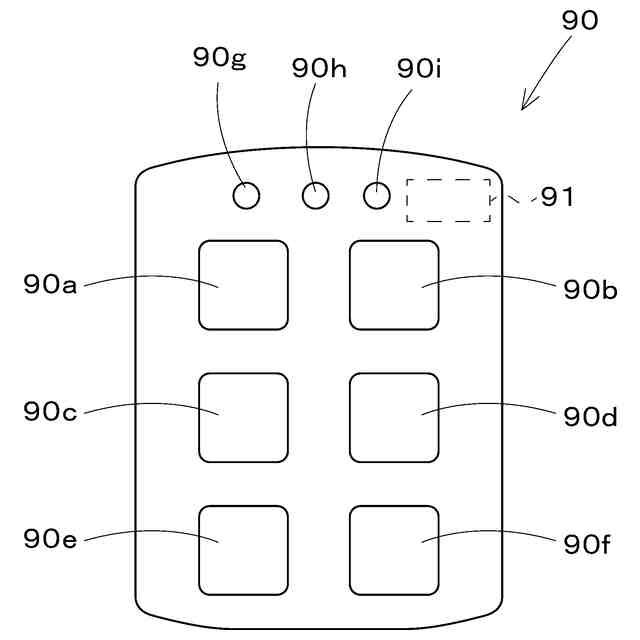
遠隔操作装置の一例を示す平面図である。
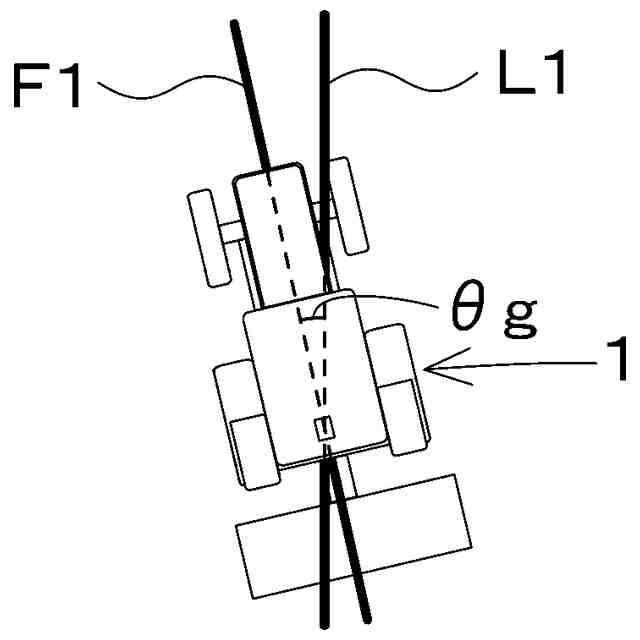
圃場の境界線を作業車両が越境することを説明するための図である。
作業車両の所定範囲内に遠隔操作装置が位置することを示す図である。
圃場の境界線を作業車両が越境することを説明するための図である。
作業車両の動作の一例を示すフローチャートである。
図8Aの続きを示すフローチャートである。
越境許可条件の一例を示す図である。
作業車両及び作業装置の動作内容の制限の一例を示す図である。
制限内容の一例を示す図である。
第1変形例の作業車両の動作を示すフローチャートである。
制限緩和の一例を示す図である。
制限強化の一例を示す図である。
農業機械に連結された耕うん装置の昇降高さの一例を示す図である。
農業機械に連結された耕うん装置の昇降高さの一例を示す図である。
散布装置の作業位置と非作業位置の一例を示す図である。
粗耕起装置の非作業位置の一例を示す図である。
粗耕起装置の作業位置の一例を示す図である。
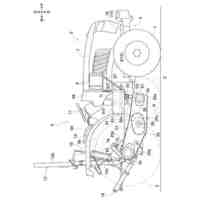
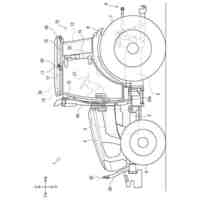
作業車両の側面図である。
第2実施形態の農作業支援システムの構成図である。
運転種別毎に設定された閾値の一例を示す図である。
第2実施形態の作業車両の動作を示すフローチャートである。
第2実施形態の所定条件の一例を示す図である。
第2実施形態の作業車両及び作業装置の動作内容の制限の一例を示す図である。
第2実施形態の制限内容の一例を示す図である。
右下り姿勢の作業車両の後面図である。
左下り姿勢の作業車両の後面図である。
上り勾配を向く作業車両の側面図である。
下り勾配を向く作業車両の側面図である。
右下り姿勢の作業車両の後面図である。
左下り姿勢の作業車両の後面図である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態について、図面を参照しながら説明する。
【0010】
[第1実施形態]
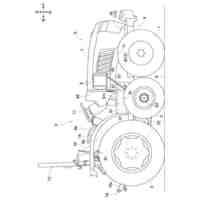
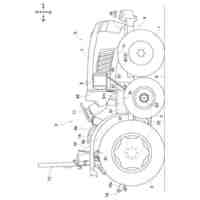
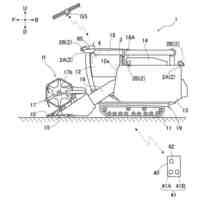
まず、本実施形態の作業車両(農業機械)1について説明する。図17は、作業車両の側面図である。本例では、作業車両1は例えばトラクタである。なお、作業車両1は、トラクタに限定されず、例えば田植機又はコンバインなどの他の農業機械、或いは農作業を行うトラクタ以外の農業機械などであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
4日前
株式会社クボタ
移植機
今日
株式会社クボタ
作業機
6日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
移植機
今日
株式会社クボタ
収穫機
4日前
株式会社クボタ
農業機械
4日前
株式会社クボタ
作業車両
6日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
作業車両
4日前
株式会社クボタケミックス
排水集合管
4日前
株式会社クボタケミックス
排水集合管
5日前
株式会社クボタ
歩行型作業機
4日前
株式会社クボタ
走行支援システム
4日前
株式会社クボタ
走行管理システム
4日前
株式会社クボタ
走行管理システム
4日前
株式会社クボタ
苗使用量管理システム
今日
株式会社クボタ
溶融炉及びその運転方法
今日
株式会社クボタ
管加工装置および管加工方法
今日
株式会社クボタ
農業機械、及び農作業支援システム
4日前
株式会社クボタ
メータパネルユニットおよび作業車両
今日
株式会社クボタ
処理剤投入装置および処理剤投入方法
今日
株式会社クボタ
作業機、プログラム、及びその記録媒体
6日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
6日前
株式会社クボタ
管積載装置、管積載方法及びプログラム
今日
株式会社クボタ
作業支援装置、作業機、及び作業支援方法
4日前
株式会社クボタケミックス
管継手カバー、排水集合管、および配管構造
6日前
株式会社クボタ
メタン発酵処理装置およびメタン発酵処理方法
4日前
株式会社クボタ
ガス回収装置、ガス回収方法および気液接触装置
今日
株式会社クボタ
処理剤収容部用清掃装置および処理剤収容部の清掃方法
今日
株式会社クボタ
表示制御装置、作業機、プログラム、及びその記録媒体
6日前
株式会社クボタ
表示制御装置、作業機、プログラム、及びその記録媒体
6日前
株式会社クボタ
作業車両
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ