TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100187
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023217383
出願日
2023-12-22
発明の名称
走行管理システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250626BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】無人収穫走行の途中で収穫機が停車した場合であっても、収穫機の無人収穫走行の再開を容易に可能な走行管理システムを提供すること。
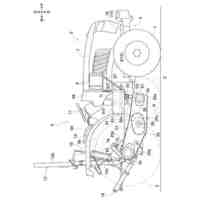
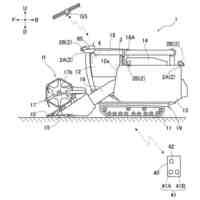
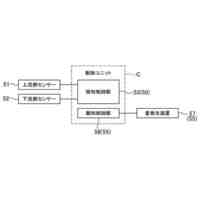
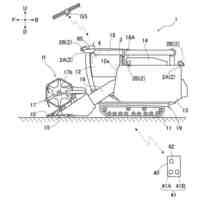
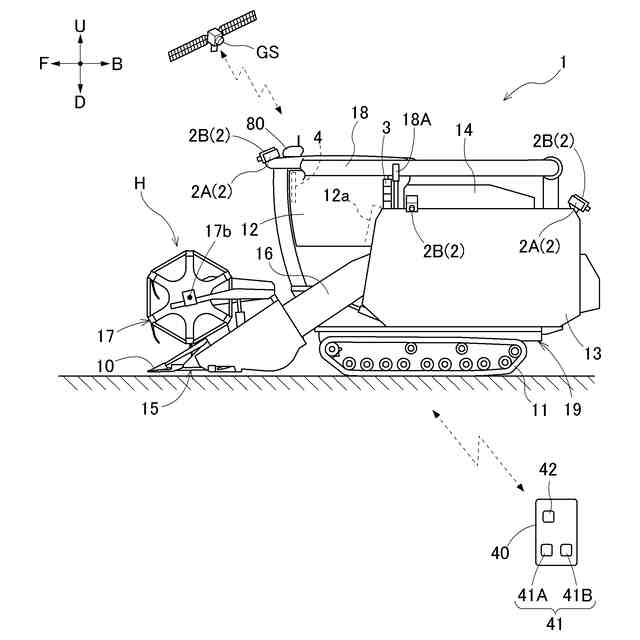
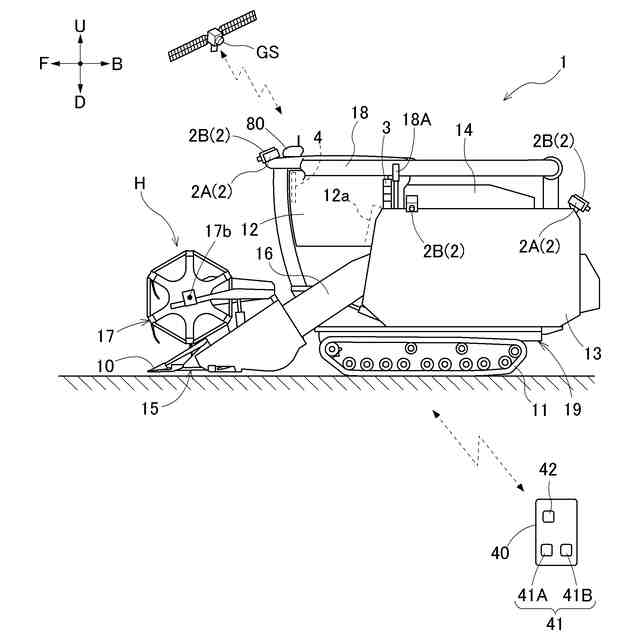
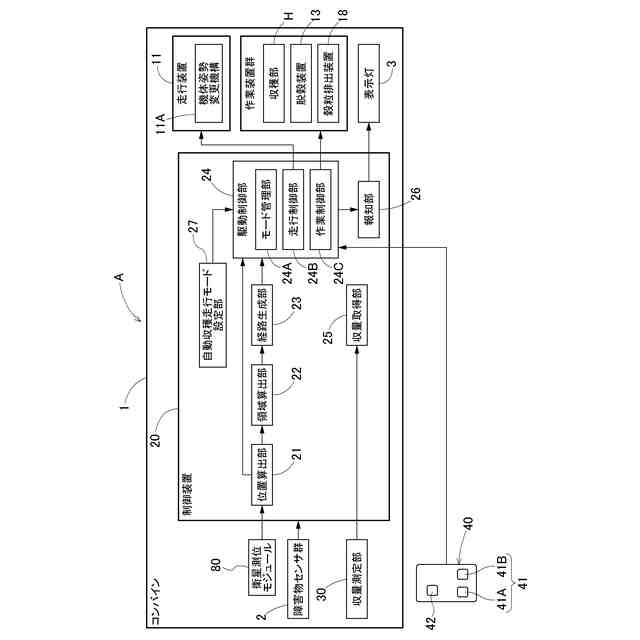
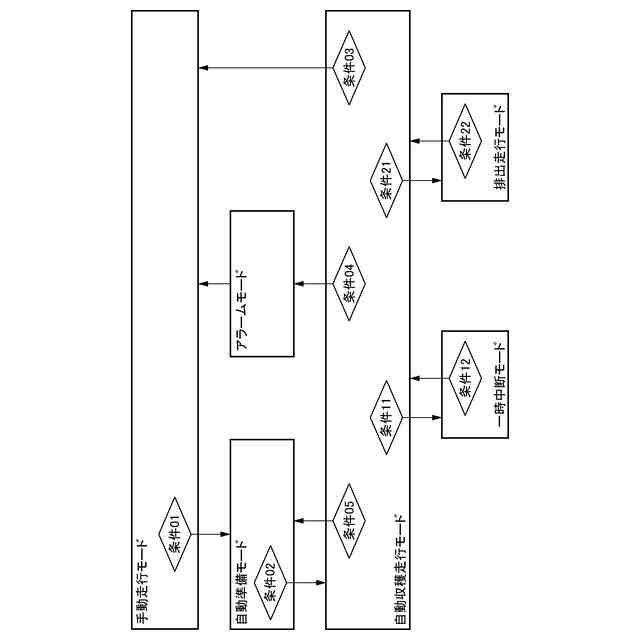
【解決手段】無人で圃場を走行しながら作物を収穫可能な収穫機1のための走行管理システム。収穫機1の外から収穫機1を監視するオペレータの操作を受け付ける遠隔操作装置40と、収穫機の周囲における物体の有無を検知する物体検知部2と、物体検知部2の検知状況を報知する報知部と、無人で作物を収穫するために自動的に走行する無人収穫走行を収穫機1に実行させる走行制御装置と、が備えられている。
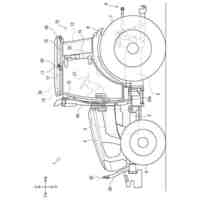
【選択図】図1
特許請求の範囲
【請求項1】
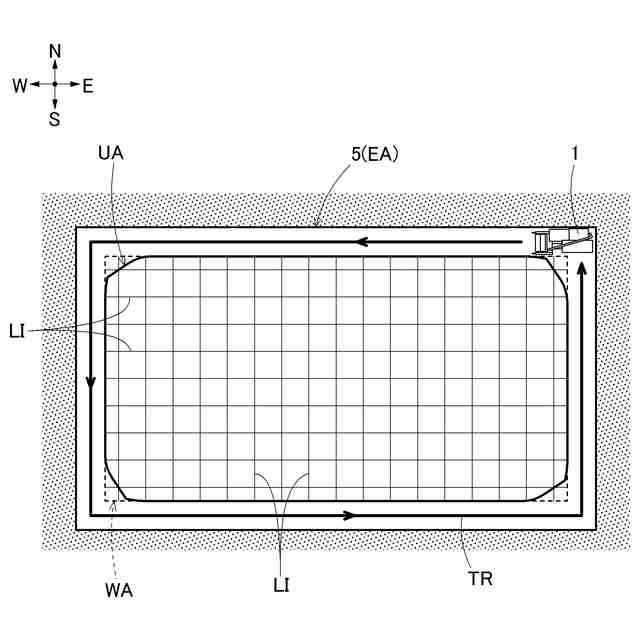
無人で圃場を走行しながら作物を収穫可能な収穫機のための走行管理システムであって、
前記収穫機の外から前記収穫機を監視するオペレータの操作を受け付ける遠隔操作装置と、
前記収穫機の周囲における物体の有無を検知する物体検知部と、
前記物体検知部の検知状況を報知する報知部と、
無人で前記作物を収穫するために自動的に走行する無人収穫走行を前記収穫機に実行させる走行制御装置と、が備えられ、
前記走行制御装置は、
前記オペレータが前記遠隔操作装置を操作したことに応じて前記収穫機に前記無人収穫走行を実行させる第一処理を実行するように構成され、
前記第一処理の実行開始後に前記物体検知部が前記物体を検知したことに応じて前記収穫機を停車させて前記収穫機に前記無人収穫走行を中断させ、かつ、前記報知部に前記物体の検知を報知させる第二処理を実行するように構成され、
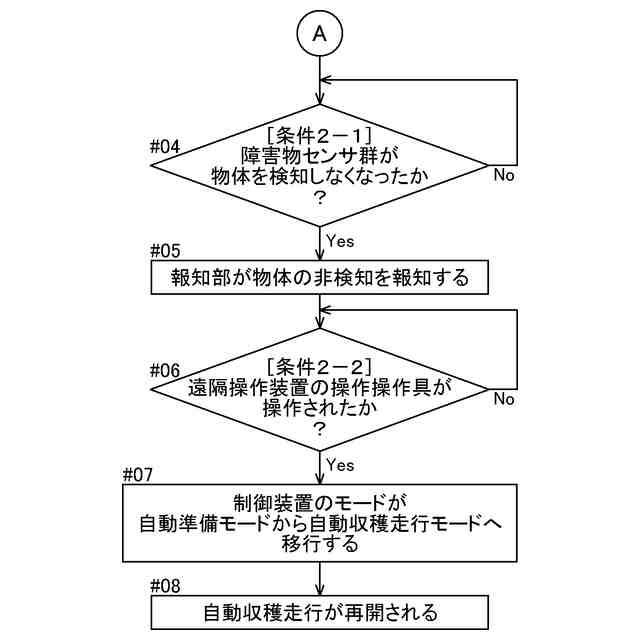
前記第二処理の実行開始後に前記物体検知部が前記物体を検知しなくなったことに応じて前記報知部に前記物体の非検知を報知させる第三処理を実行するように構成され、
前記第二処理の実行開始後に、前記物体検知部が前記物体を検知しなくなったこと及び前記オペレータが前記遠隔操作装置を操作したことに応じて、前記収穫機に前記無人収穫走行を再開させる第四処理を実行可能なように構成されている走行管理システム。
続きを表示(約 970 文字)
【請求項2】
前記走行制御装置は、前記物体検知部が前記物体を検知していると、前記第四処理を実行不能なように構成されている請求項1に記載の走行管理システム。
【請求項3】
前記遠隔操作装置に、前記オペレータに操作される複数の操作具が備えられ、
前記走行制御装置は、前記物体検知部が前記物体を検知しなくなり、かつ、前記オペレータが前記複数の操作具を同時に操作したことに応じて前記第四処理を実行するように構成されている請求項1に記載の走行管理システム。
【請求項4】
前記遠隔操作装置に、前記オペレータに操作される操作具が備えられ、
前記走行制御装置は、前記物体検知部が前記物体を検知しなくなり、かつ、前記オペレータが前記操作具を予め設定された時間以上に亘って連続的に操作したことに応じて前記第四処理を実行するように構成されている請求項1に記載の走行管理システム。
【請求項5】
前記収穫機に、航法衛星からの信号を受信する受信装置が備えられ、
前記走行制御装置は、
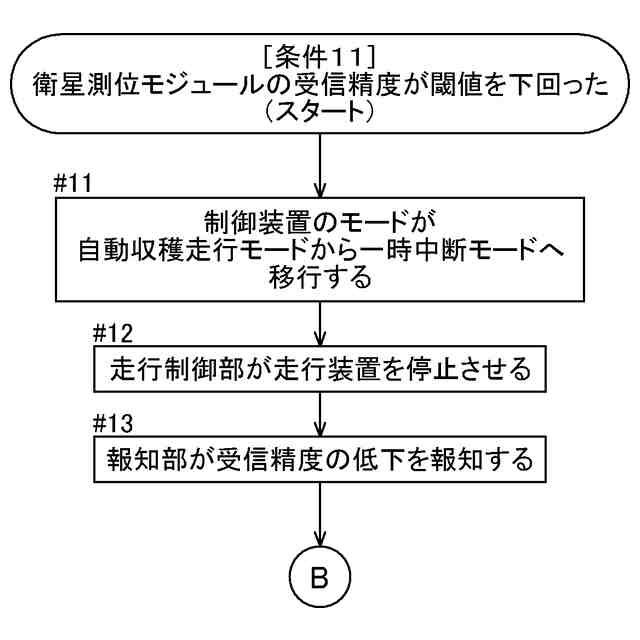
前記第一処理の実行開始後に前記受信装置の受信精度が予め設定された閾値よりも悪くなったことに応じて前記収穫機を停車させて前記収穫機に前記無人収穫走行を中断させる第五処理を実行するように構成され、
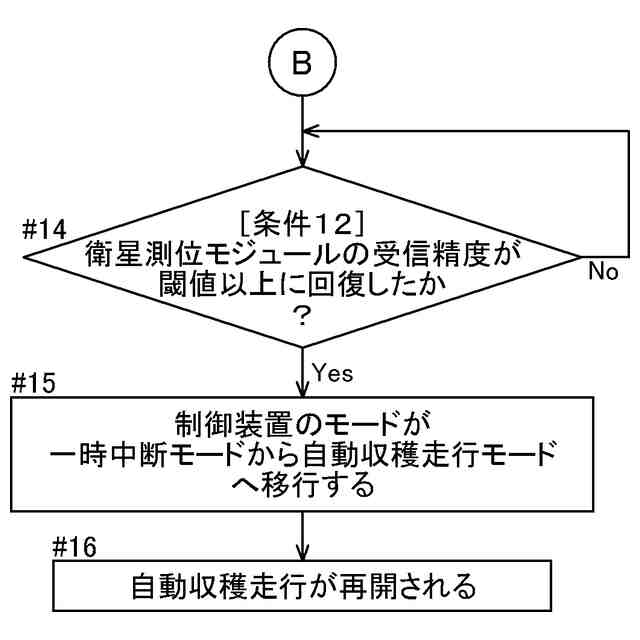
前記第五処理の実行開始後に前記受信精度が予め設定された閾値以上に良くなったことに応じて前記収穫機に前記無人収穫走行を再開させる第六処理を実行するように構成されている請求項1から4の何れか一項に記載の走行管理システム。
【請求項6】
前記収穫機に、前記作物の収穫量を検出する収穫量検出部が備えられ、
前記走行制御装置は、
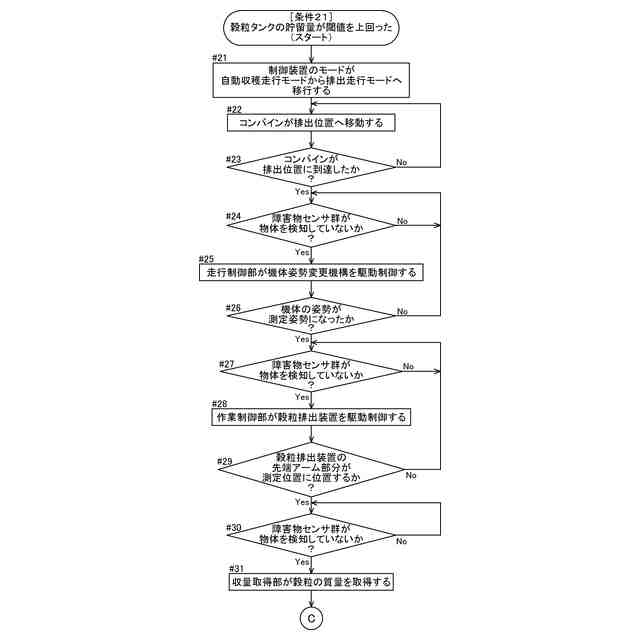
前記第一処理の実行開始後に前記収穫量が予め設定された閾値よりも多くなったことに応じて前記収穫機に前記無人収穫走行を中断させて前記作物を排出可能な排出位置に前記収穫機を走行させる第七処理を実行するように構成され、
前記収穫機から前記作物が排出された後に前記オペレータが前記遠隔操作装置を操作したことに応じて前記収穫機に前記無人収穫走行を再開させる第八処理を実行可能なように構成されている請求項1から4の何れか一項に記載の走行管理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人で圃場を走行しながら作物を収穫可能な収穫機のための走行管理システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば特許文献1に開示された収穫機では、収穫機の周囲における物体(文献では「障害物」)の有無を検知する物体検知部(文献では「障害物センサ」)が備えられている。物体検知部が物体を検知したことに応じて、収穫機が停車する。
【先行技術文献】
【特許文献】
【0003】
特開2020-018219号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されたような従来の収穫機においては、オペレータが搭乗して周囲を監視することが前提の自動走行が実行されていた。オペレータが搭乗していると、物体の検知に応じて収穫機が停車した場合であっても、搭乗するオペレータが所定の操作を行うことによって、自動走行の再開が可能であった。一方、無人で走行しながら作物を収穫する無人収穫走行が行われる収穫機では、オペレータ等は収穫機の外で収穫機を監視する。このため、物体の検知に応じて収穫機が停車すると、オペレータ等が収穫機の元へ駆け付けて対象を行う必要性も考えられる。このような場合には、自動走行の再開が面倒な作業になる虞がある。また、オペレータ等は監視のみならず他の作業も同時並行で行っていることも考えられる。このため、オペレータが他の作業に専念している最中に収穫機の無人収穫走行が停止すると、オペレータが収穫機の停止に気付かないまま時間が経過し、工数のロスに繋がる虞もある。この点に鑑みて、容易に無人収穫走行の再開が可能な構成に改善する余地がある。
【0005】
本発明の目的は、無人収穫走行の途中で収穫機が停車した場合であっても、収穫機の無人収穫走行の再開を容易に可能な走行管理システムを提供することにある。
【課題を解決するための手段】
【0006】
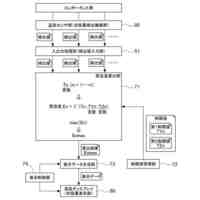
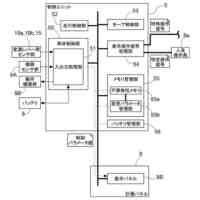
本発明は、無人で圃場を走行しながら作物を収穫可能な収穫機のための走行管理システムであって、前記収穫機の外から前記収穫機を監視するオペレータの操作を受け付ける遠隔操作装置と、前記収穫機の周囲における物体の有無を検知する物体検知部と、前記物体検知部の検知状況を報知する報知部と、無人で前記作物を収穫するために自動的に走行する無人収穫走行を前記収穫機に実行させる走行制御装置と、が備えられ、前記走行制御装置は、前記オペレータが前記遠隔操作装置を操作したことに応じて前記収穫機に前記無人収穫走行を実行させる第一処理を実行するように構成され、前記第一処理の実行開始後に前記物体検知部が前記物体を検知したことに応じて前記収穫機を停車させて前記収穫機に前記無人収穫走行を中断させ、かつ、前記報知部に前記物体の検知を報知させる第二処理を実行するように構成され、前記第二処理の実行開始後に前記物体検知部が前記物体を検知しなくなったことに応じて前記報知部に前記物体の非検知を報知させる第三処理を実行するように構成され、前記第二処理の実行開始後に、前記物体検知部が前記物体を検知しなくなったこと及び前記オペレータが前記遠隔操作装置を操作したことに応じて、前記収穫機に前記無人収穫走行を再開させる第四処理を実行可能なように構成されていることを特徴とする。
【0007】
本発明によると、第二処理では物体の検知に応じた収穫機の停止とともに物体の検知が報知される。このため、オペレータ等は無人収穫走行の中断、及び、圃場における物体の存在に素早く気付ける。このため、オペレータ等は圃場の物体の存在を認識したうえで物体に対して素早く対処可能となる。また、第三処理では物体の非検知が報知される。このため、オペレータ等は無人収穫走行の中断要因が解消したことを認識できる。そして、オペレータ等は、収穫機に駆け付けなくても遠隔操作装置を操作して無人収穫走行を再開できる。これにより、無人収穫走行の途中で収穫機が停車した場合であっても、収穫機の無人収穫走行の再開を容易に可能な走行管理システムが実現される。
【0008】
本発明において、前記走行制御装置は、前記物体検知部が前記物体を検知していると、前記第四処理を実行不能なように構成されていると好適である。
【0009】
本構成により、無人収穫走行の中断要因が解消しないまま収穫機の無人収穫走行が再開される可能性が回避される。
【0010】
本発明において、前記遠隔操作装置に、前記オペレータに操作される複数の操作具が備えられ、前記走行制御装置は、前記物体検知部が前記物体を検知しなくなり、かつ、前記オペレータが前記複数の操作具を同時に操作したことに応じて前記第四処理を実行するように構成されていると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
9日前
株式会社クボタ
移植機
9日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
田植機
9日前
株式会社クボタ
作業機
2日前
株式会社クボタ
収穫機
2日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
農業機械
2日前
株式会社クボタケミックス
排水集合管
3日前
株式会社クボタケミックス
排水集合管
2日前
株式会社クボタ
歩行型作業機
2日前
株式会社クボタケミックス
電気融着継手
11日前
株式会社クボタ
嫌気性処理方法
16日前
株式会社クボタケミックス
セグメント曲管
12日前
株式会社クボタ
浮遊物観測装置
10日前
株式会社クボタ
走行管理システム
2日前
株式会社クボタ
走行支援システム
2日前
株式会社クボタ
走行管理システム
2日前
株式会社クボタ
経路生成システムおよび作業機
10日前
株式会社クボタ
状態量表示システム及び作業車
9日前
株式会社クボタ
画面遷移制御システム及び作業車
9日前
株式会社クボタ
パラメータ管理システム及び作業車
9日前
株式会社クボタ
農業機械、及び農作業支援システム
2日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ