TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099480
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216164
出願日
2023-12-21
発明の名称
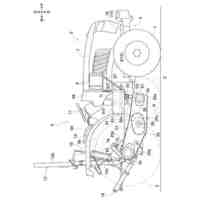
歩行型作業機
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20250626BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業者に対し、適切な作業のガイダンスを行うことができる歩行型作業機の提供を目的とする。
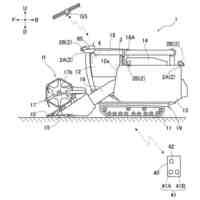
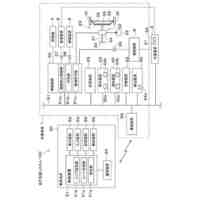
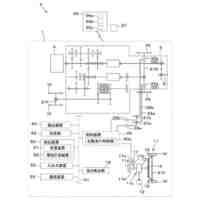
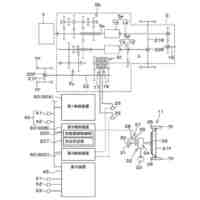
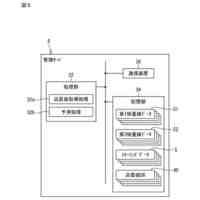
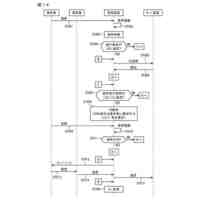
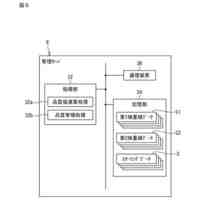
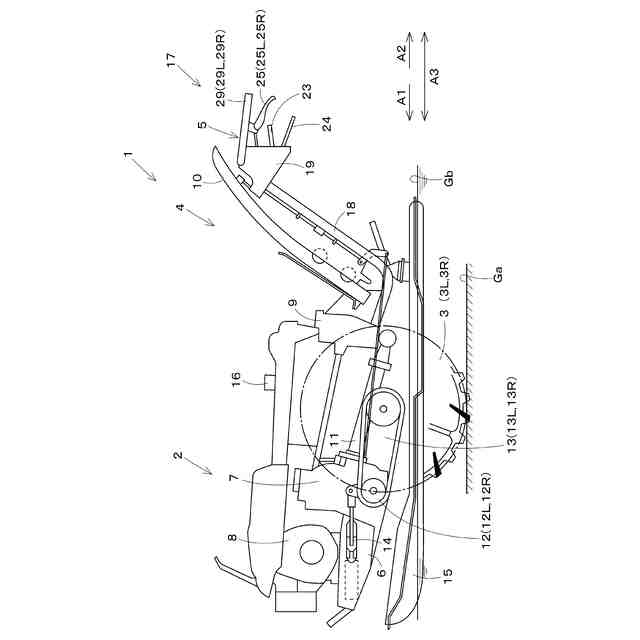
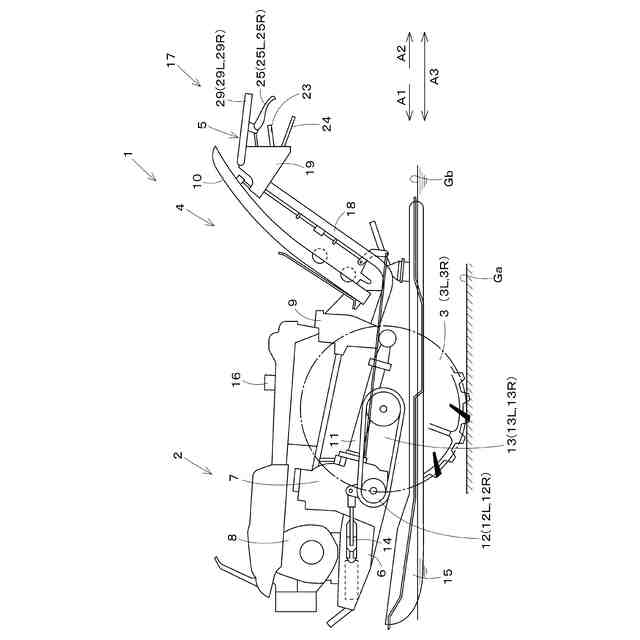
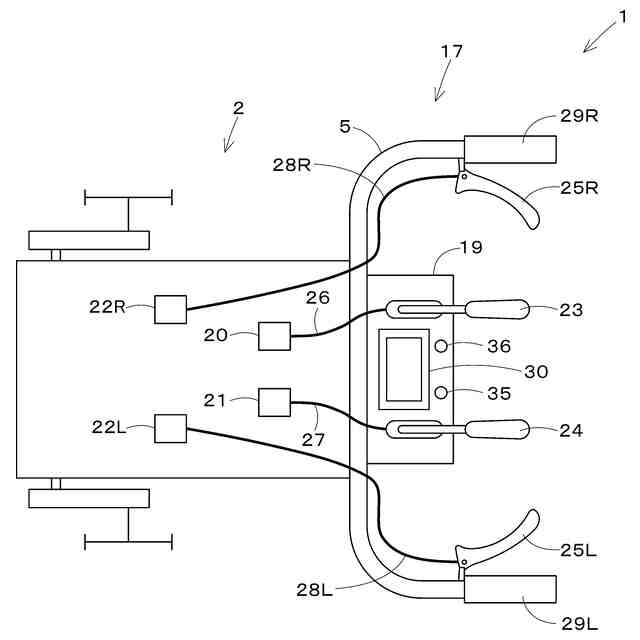
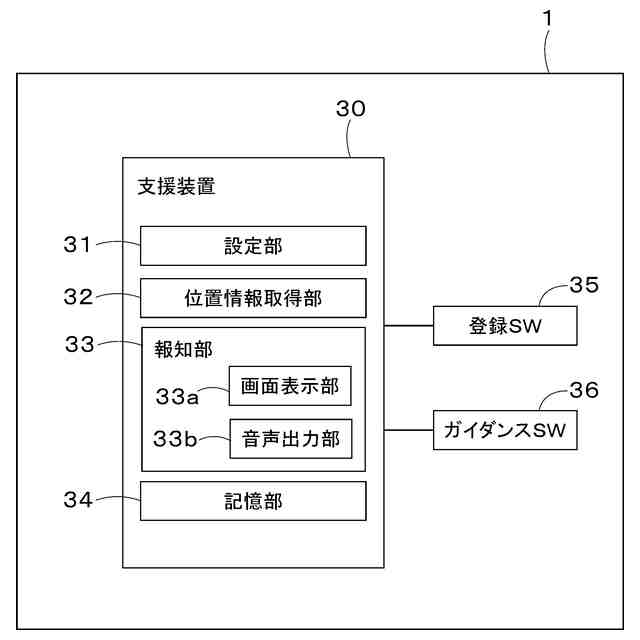
【解決手段】歩行型作業機は、機体と、機体の左右に設けられた車輪と、機体に設けられた作業装置と、機体に設けられ、且つ作業者により把持される把持部と、作業場における走行ラインに基づいて作業装置による作業を支援する支援装置と、を備え、支援装置は、走行ラインを設定する設定部と、機体の位置情報を取得し、位置情報に基づいて走行ラインを走行するためのガイダンスを作業者に対して行う報知部と、を有している。
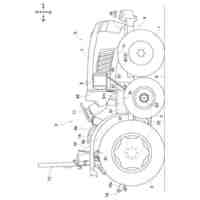
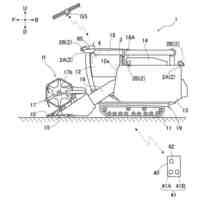
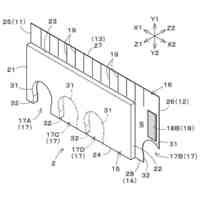
【選択図】図1
特許請求の範囲
【請求項1】
機体と、
前記機体の左右に設けられた車輪と、
前記機体に設けられた作業装置と、
前記機体に設けられ、且つ作業者により把持される把持部と、
作業場における走行ラインに基づいて前記作業装置による作業を支援する支援装置と、を備え、
前記支援装置は、
前記走行ラインを設定する設定部と、
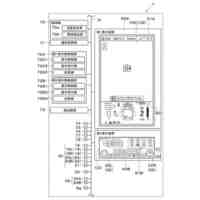
前記機体の位置情報を取得し、当該位置情報に基づいて前記走行ラインを走行するためのガイダンスを前記作業者に対して行う報知部と、
を有している歩行型作業機。
続きを表示(約 1,300 文字)
【請求項2】
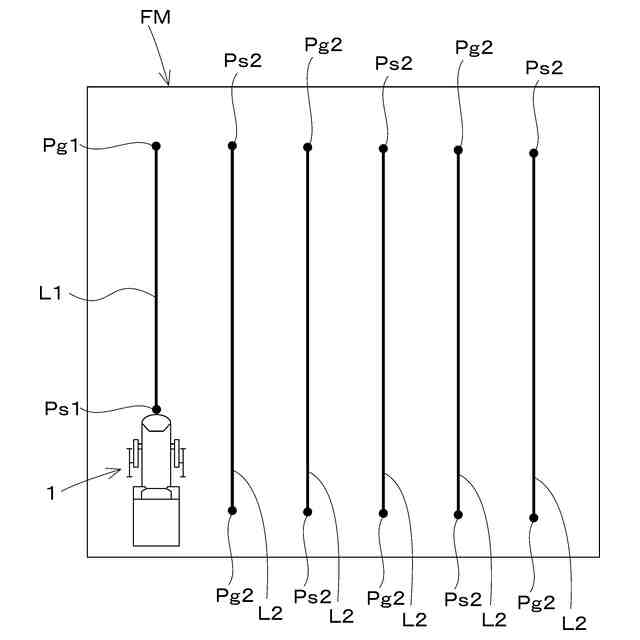
前記設定部は、前記位置情報に基づいて走行基準ラインを定義し、前記走行基準ラインと平行に沿った前記走行ラインを設定する請求項1に記載の歩行型作業機。
【請求項3】
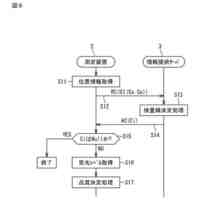
前記報知部は、前記位置情報により、前記機体が前記走行ラインから第1所定値以上の偏差でずれていると判断した場合、前記機体を当該ずれ方向とは反対の側に向けるための前記把持部の操作のガイダンスを行う請求項1に記載の歩行型作業機。
【請求項4】
前記左の車輪の回転を操作するための第1左操作具と、
前記右の車輪の回転を操作するための第1右操作具と、を備え、
前記報知部は、前記位置情報により、前記機体が前記走行ラインから第2所定値以上の偏差でずれていると判断した場合、前記機体を当該ずれ方向とは反対の側に向けるための前記第1左操作具又は前記第1右操作具の操作のガイダンスを行う請求項1に記載の歩行型作業機。
【請求項5】
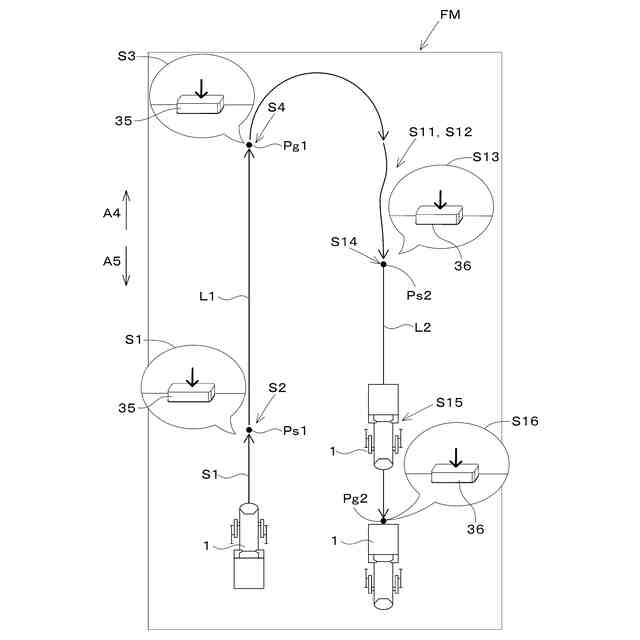
前記設定部は、前記走行ラインを含む、走行ルートの開始点及び終了点を設定し、
前記報知部は、前記開始点及び前記終了点と、前記位置情報とに基づいて、前記機体と前記開始点及び/又は前記終了点との位置関係のガイダンスを行う請求項1に記載の歩行型作業機。
【請求項6】
前記作業装置の作動を操作するための第2操作具を備え、
前記報知部は、前記走行ラインと前記位置情報とに基づいて、前記第2操作具の操作のガイダンスを行う請求項1に記載の歩行型作業機。
【請求項7】
前記作業装置の作動を操作するための第2操作具を備え、
前記設定部は、前記走行ラインの始点及び終点を設定し、
前記報知部は、前記始点又は前記終点と、前記位置情報とに基づいて、前記第2操作具の操作のガイダンスを行う請求項1に記載の歩行型作業機。
【請求項8】
前記作業装置の作動を操作するための第2操作具を備え、
前記設定部は、前記走行ラインを含む、走行ルートの開始点及び終了点を設定し、
前記報知部は、前記開始点及び/又は前記終了点と、前記位置情報とに基づいて、前記第2操作具の操作のガイダンスを行う請求項1に記載の歩行型作業機。
【請求項9】
前記設定部は、前記走行ラインの始点及び終点を設定し、
前記報知部は、前記始点又は前記終点と、前記位置情報とに基づいて、前記機体を旋回させるために前記作業装置を持ち上げる又は降ろす操作のガイダンスを行う請求項1に記
載の歩行型作業機。
【請求項10】
前記左の車輪の回転を操作するための第1左操作具と、
前記右の車輪の回転を操作するための第1右操作具と、を備え、
前記設定部は、前記走行ラインの終点を設定し、
前記報知部は、前記走行ラインの前記終点と、前記位置情報とに基づいて、前記機体を旋回させるための前記第1左操作具又は前記第1右操作具の操作のガイダンスを行う請求項1に記載の歩行型作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場等での農作業等の作業をする歩行型作業機に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
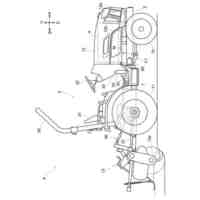
特許文献1に開示された歩行型水田作業機は、走行機体の左右に駆動車輪を備え、走行機体の後部に操縦ハンドルを備える。
【先行技術文献】
【特許文献】
【0003】
特開平6-153626号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示された技術では、作業者自身が作業の状況を見ながら作業機(水田作業機)をどう操作すべきか判断するため、作業者への負担が大きく、また、作業者が想定した作業結果を得ることが難しかった。本発明は、このような従来技術の問題点を解決すべくなされたものであって、作業者に対し、適切な作業のガイダンスを行うことができる歩行型作業機の提供を目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様に係る歩行型作業機は、機体と、前記機体の左右に設けられた車輪と、前記機体に設けられた作業装置と、前記機体に設けられ、且つ作業者により把持される把持部と、作業場における走行ラインに基づいて前記作業装置による作業を支援する支援装置と、を備え、前記支援装置は、前記走行ラインを設定する設定部と、前記機体の位置情報を取得し、当該位置情報に基づいて前記走行ラインを走行するためのガイダンスを前記作業者に対して行う報知部と、を有している。
【0006】
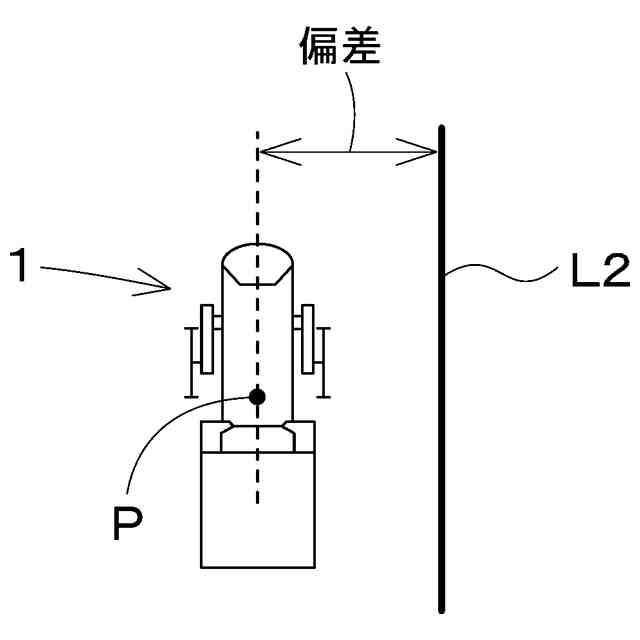
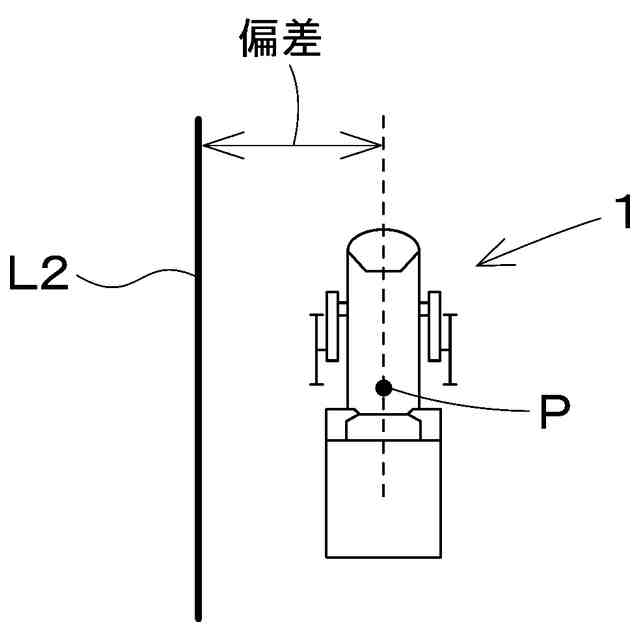
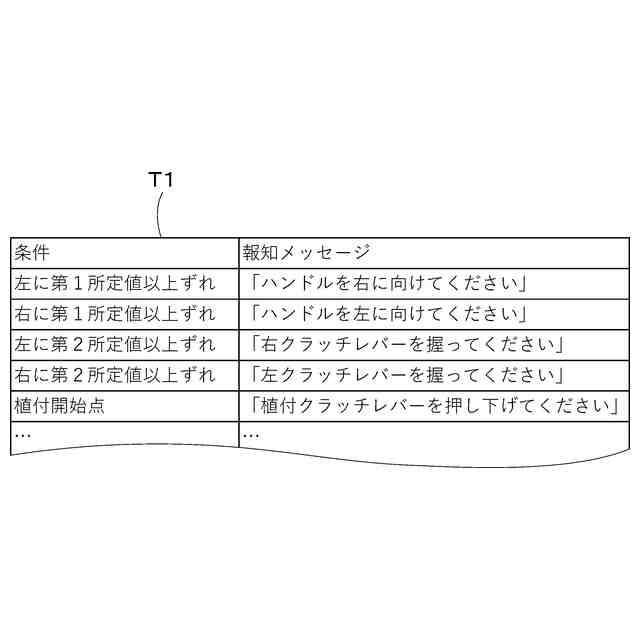
前記設定部は、前記位置情報に基づいて走行基準ラインを定義し、前記走行基準ラインと平行に沿った前記走行ラインを設定してもよい。前記報知部は、前記位置情報により、前記機体が前記走行ラインから第1所定値以上の偏差でずれていると判断した場合、前記機体を当該ずれ方向とは反対の側に向けるための前記把持部の操作のガイダンスを行ってもよい。
【0007】
前記歩行型作業機は、前記左の車輪の回転を操作するための第1左操作具と、前記右の車輪の回転を操作するための第1右操作具と、を備え、前記報知部は、前記位置情報により、前記機体が前記走行ラインから第2所定値以上の偏差でずれていると判断した場合、前記機体を当該ずれ方向とは反対の側に向けるための前記第1左操作具又は前記第1右操作具の操作のガイダンスを行ってもよい。
【0008】
前記設定部は、前記走行ラインを含む、走行ルートの開始点及び終了点を設定し、前記報知部は、前記開始点及び前記終了点と、前記位置情報とに基づいて、前記機体と前記開始点及び/又は前記終了点との位置関係のガイダンスを行ってもよい。前記歩行型作業機は、前記作業装置の作動を操作するための第2操作具を備え、前記報知部は、前記走行ラインと前記位置情報とに基づいて、前記第2操作具の操作のガイダンスを行ってもよい。
【0009】
前記歩行型作業機は、前記作業装置の作動を操作するための第2操作具を備え、前記設定部は、前記走行ラインの始点及び終点を設定し、前記報知部は、前記始点又は前記終点
と、前記位置情報とに基づいて、前記第2操作具の操作のガイダンスを行ってもよい。前記歩行型作業機は、前記作業装置の作動を操作するための第2操作具を備え、前記設定部は、前記走行ラインを含む、走行ルートの開始点及び終了点を設定し、前記報知部は、前記開始点及び/又は前記終了点と、前記位置情報とに基づいて、前記第2操作具の操作のガイダンスを行ってもよい。
【0010】
前記設定部は、前記走行ラインの始点及び終点を設定し、前記報知部は、前記始点又は前記終点と、前記位置情報とに基づいて、前記機体を旋回させるために前記作業装置を持ち上げる又は降ろす操作のガイダンスを行ってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
作業機
2日前
株式会社クボタ
収穫機
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
4日前
株式会社クボタ
農業機械
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタケミックス
排水集合管
3日前
株式会社クボタケミックス
排水集合管
2日前
株式会社クボタ
歩行型作業機
2日前
株式会社クボタ
走行支援システム
2日前
株式会社クボタ
走行管理システム
2日前
株式会社クボタ
走行管理システム
2日前
株式会社クボタ
農業機械、及び農作業支援システム
2日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
4日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
4日前
株式会社クボタ
作業支援装置、作業機、及び作業支援方法
2日前
株式会社クボタケミックス
管継手カバー、排水集合管、および配管構造
4日前
株式会社クボタ
メタン発酵処理装置およびメタン発酵処理方法
2日前
株式会社クボタ
表示制御装置、作業機、プログラム、及びその記録媒体
4日前
株式会社クボタ
表示制御装置、作業機、プログラム、及びその記録媒体
4日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
コンバイン
9日前
株式会社クボタ
電動作業車
4日前
株式会社クボタ
収穫支援システム、処理装置、およびコンピュータプログラム
2日前
株式会社クボタ
果実管理装置、果実管理システム、及びコンピュータプログラム
2日前
株式会社クボタ
圃場貯水システム
2日前
株式会社クボタ
作業機の変速機構、シフトフォーク、及びシフトフォークの製造方法
3日前
株式会社クボタ
管理システム、管理装置、管理方法、およびコンピュータプログラム
2日前
株式会社クボタ
青果物の品質測定システム、検量線の切り替え方法、及びコンピュータプログラム
2日前
株式会社クボタ
測定システム、処理装置、果実の測定品質値を求める方法、およびコンピュータプログラム
2日前
株式会社クボタ
果実の価格推定装置、果実の価格推定方法、コンピュータプログラム、及び果実の価格推定システム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ