TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085460
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199351
出願日
2023-11-24
発明の名称
自動走行制御システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250529BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】開始点誘導経路に沿って内部往復経路の開始位置までスムーズに自動走行することを目的とする。
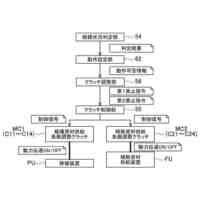
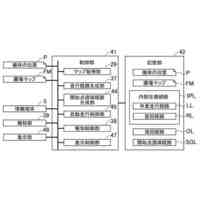
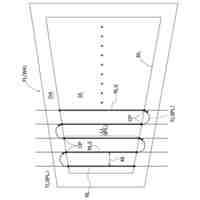
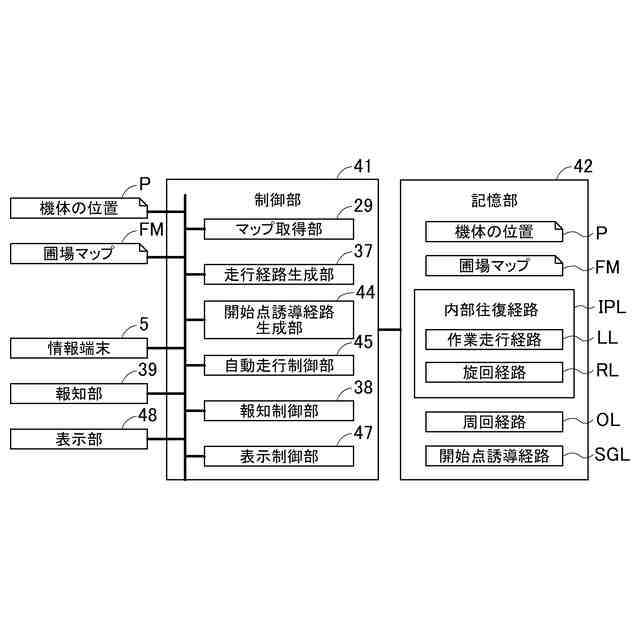
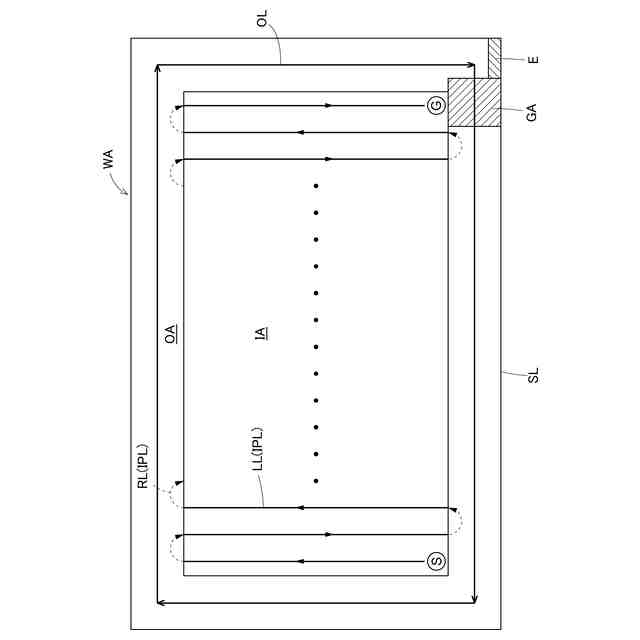
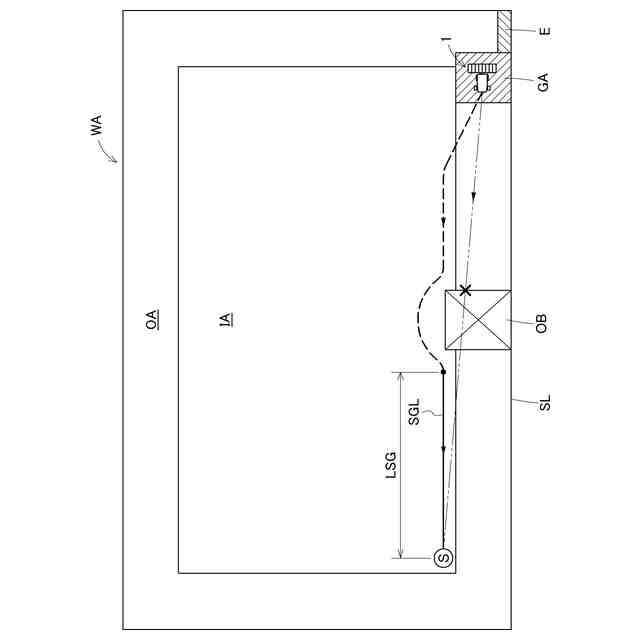
【解決手段】外周領域を周回走行するための目標走行経路である周回経路OL、および、内部領域を往復走行するための目標走行経路である内部往復経路IPLを生成する走行経路生成部37と、作業車の現在位置と内部往復経路IPLの開始点とを直線状に結ぶ開始点誘導経路SGLを生成する開始点誘導経路生成部44と、開始点誘導経路SGLを含む目標走行経路に沿った自動走行を制御する自動走行制御部45とを備え、開始点誘導経路生成部44は、開始点誘導経路SGL上に障害物または圃場辺が存在する場合、障害物より開始点側に位置する作業車の位置から開始点までを結ぶ線分を開始点誘導経路SGLとして生成し直す。
【選択図】図10
特許請求の範囲
【請求項1】
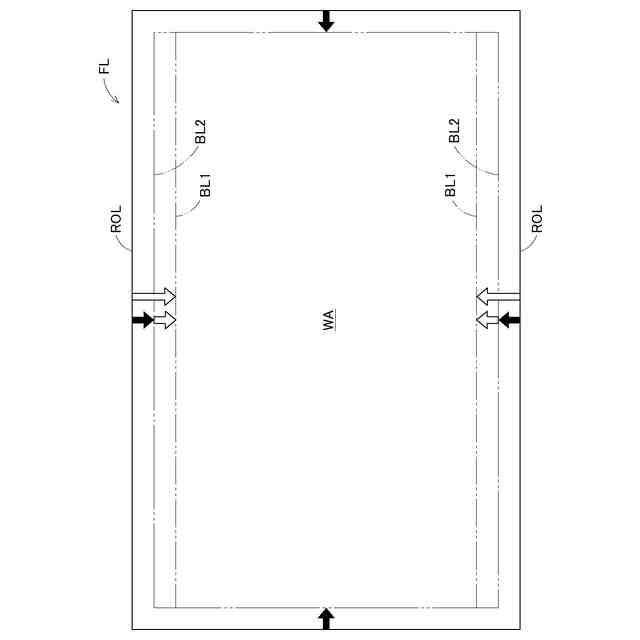
圃場の外周に沿う外周領域と前記外周領域の内側の内部領域とを目標走行経路に沿って自動走行する作業車の自動走行制御システムであって、
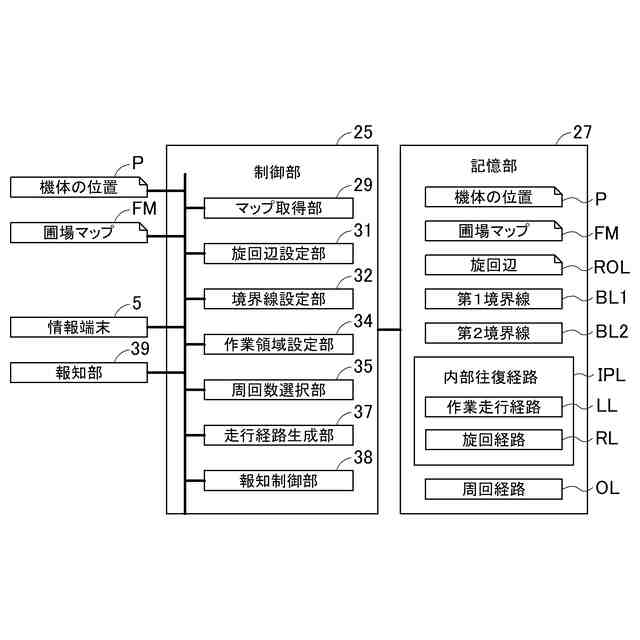
前記外周領域を周回走行するための前記目標走行経路である周回経路、および、前記内部領域を往復走行するための前記目標走行経路である内部往復経路を生成する走行経路生成部と、
前記作業車の現在位置と前記内部往復経路の開始点とを直線状に結ぶ開始点誘導経路を生成する開始点誘導経路生成部と、
前記開始点誘導経路を含む前記目標走行経路に沿った前記自動走行を制御する自動走行制御部とを備え、
前記開始点誘導経路生成部は、前記開始点誘導経路上に障害物または圃場辺が存在する場合、前記障害物より前記開始点側に位置する前記作業車の位置から前記開始点までを結ぶ線分を前記開始点誘導経路として生成し直す自動走行制御システム。
続きを表示(約 740 文字)
【請求項2】
表示部をさらに備え、
前記開始点誘導経路生成部は、前記障害物を迂回するための前記現在位置からの迂回経路を前記表示部に表示させる請求項1に記載の自動走行制御システム。
【請求項3】
前記開始点誘導経路の長さが所定の長さ以下の場合、前記自動走行制御部は前記開始点誘導経路に沿った自動走行を停止する請求項1に記載の自動走行制御システム。
【請求項4】
所定の報知を行う報知部をさらに備え、
前記周回経路は、任意の周回数を人為的に選択でき、
前記開始点誘導経路の長さが所定の長さ以下の場合、前記走行経路生成部は、前記周回数として複数回を選択することを推奨する報知を前記報知部に行わせる請求項1に記載の自動走行制御システム。
【請求項5】
前記周回経路と共に、前記周回経路と区別できる態様で前記開始点誘導経路を表示する表示部をさらに備える請求項1に記載の自動走行制御システム。
【請求項6】
前記表示部は、前記周回経路と前記開始点誘導経路との表示態様を異ならせて表示する請求項5に記載の自動走行制御システム。
【請求項7】
前記現在位置は、前記圃場の外形形状を取得するために行う非作業走行の終了位置である請求項1に記載の自動走行制御システム。
【請求項8】
前記周回経路は、任意の周回数を人為的に選択でき、
前記走行経路生成部は、選択された前記周回数に応じて前記外周領域を設定し、
前記自動走行制御部は、前記開始点誘導経路に沿った自動走行を、前記外周領域に前記作業車が位置する場合にのみ実行する請求項1に記載の自動走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目標走行経路に沿って圃場を自動走行する作業車の自動走行制御システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1に開示されるように、田植機(作業車)は、圃場の内部領域を内部往復経路に沿って往復走行する。また、田植機(作業車)は、機体を作業開始点(内部往復経路の開始位置)まで自動走行させるための作業開始点誘導経路(開始点誘導経路)を生成する。
【先行技術文献】
【特許文献】
【0003】
特開2021-108600号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
開始点誘導経路は直進状に生成されることが好適であるが、途中に障害物が存在すると障害物を迂回する経路を生成する必要があり、開始点誘導経路に沿ってスムーズな走行ができない場合があった。
【0005】
本発明は、開始点誘導経路に沿って内部往復経路の開始位置までスムーズに自動走行することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一実施形態に係る自動走行制御システムは、圃場の外周に沿う外周領域と前記外周領域の内側の内部領域とを目標走行経路に沿って自動走行する作業車の自動走行制御システムであって、前記外周領域を周回走行するための前記目標走行経路である周回経路、および、前記内部領域を往復走行するための前記目標走行経路である内部往復経路を生成する走行経路生成部と、前記作業車の現在位置と前記内部往復経路の開始点とを直線状に結ぶ開始点誘導経路を生成する開始点誘導経路生成部と、前記開始点誘導経路を含む前記目標走行経路に沿った前記自動走行を制御する自動走行制御部とを備え、前記開始点誘導経路生成部は、前記開始点誘導経路上に障害物または圃場辺が存在する場合、前記障害物より前記開始点側に位置する前記作業車の位置から前記開始点までを結ぶ線分を前記開始点誘導経路として生成し直す。
【0007】
圃場の外周に沿った非作業走行(空走り)の後に、内部往復経路の開始位置に移動するための開始点誘導経路が生成される場合がある。非作業走行の終了位置から内部往復経路の開始位置まで直線状の開始点誘導経路を生成されると開始点誘導走行が容易となるが、この直線上に障害物が存在すると、開始点誘導経路が障害物を迂回する経路となる。このような開始点誘導経路を自動走行すると、障害物を迂回するために細かく左右に旋回することが必要となりスムーズな自動走行ができない場合がある。
【0008】
上記構成によると、障害物を迂回した後の位置から直線状の開始点誘導経路を生成することができ、開始点誘導経路に沿って内部往復経路の開始位置までスムーズに自動走行することができる。
【0009】
また、表示部をさらに備え、前記開始点誘導経路生成部は、前記障害物を迂回するための前記現在位置からの迂回経路を前記表示部に表示させてもよい。
【0010】
このような構成により、作業者は、表示部に表示された迂回経路を参照して、容易に障害物を迂回する走行を行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
24日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業機
17日前
株式会社クボタ
田植機
24日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業車
3日前
株式会社クボタ
田植機
3日前
株式会社クボタ
移植機
3日前
株式会社クボタ
作業車
3日前
株式会社クボタ
圃場作業車
19日前
株式会社クボタ
作物収穫機
27日前
株式会社クボタ
多目的車両
12日前
株式会社クボタ
電動作業車両
12日前
株式会社クボタ
電動作業車両
19日前
株式会社クボタ
乗用型田植機
19日前
株式会社クボタ
電動作業車両
26日前
株式会社クボタ
歩行型作業機
19日前
株式会社クボタケミックス
電気融着継手
5日前
株式会社クボタ
浮遊物観測装置
4日前
株式会社クボタ
嫌気性処理方法
10日前
株式会社クボタケミックス
セグメント曲管
6日前
株式会社クボタ
自動走行制御システム
24日前
株式会社クボタ
自動走行制御システム
24日前
株式会社クボタ
燃料噴射装置およびエンジン
23日前
株式会社クボタ
経路生成システムおよび作業機
4日前
株式会社クボタ
状態量表示システム及び作業車
3日前
株式会社クボタ
移植機及び苗ステーの固定方法
20日前
株式会社クボタ
作業機及びカバー部材の固定方法
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ