TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085463
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199354
出願日
2023-11-24
発明の名称
走行制御システム、作業車、走行制御方法
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250529BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】同一走行経路を非作業走行と作業走行とで重複走行する非効率を抑制しながらも、正確な圃場形状が算出される技術を提供する。
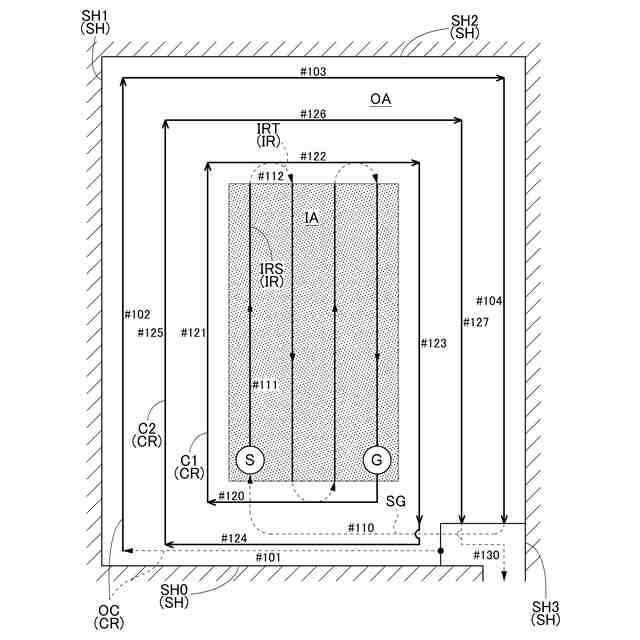
【解決手段】基本辺と基本辺以外の残存辺とを境界線とする圃場を走行する作業車の走行制御システムは、基本辺に沿った非作業走行である基本辺走行で取得した基本辺走行軌跡と、残存辺に沿った作業走行である残存辺走行で取得した残存辺走行軌跡とに基づいて、圃場形状を算出する圃場形状算出部62と、圃場形状に基づいて、前記基本辺走行軌跡と前記残存辺走行軌跡とを含む外周領域と、前記外周領域の内側の内部領域とを設定する領域設定部64と、内部領域を自動で往復作業走行するための往復走行経路を生成する往復走行経路生成部65bを備える。
【選択図】図4
特許請求の範囲
【請求項1】
基本辺と前記基本辺以外の残存辺とを境界線とする圃場を走行する作業車の走行制御システムであって、
前記基本辺に沿った非作業走行である基本辺走行で取得した基本辺走行軌跡と、前記残存辺に沿った作業走行である残存辺走行で取得した残存辺走行軌跡とに基づいて、圃場形状を算出する圃場形状算出部と、
前記圃場形状に基づいて、前記基本辺走行軌跡と前記残存辺走行軌跡とを含む外周領域と、前記外周領域の内側の内部領域とを設定する領域設定部と、
前記内部領域を自動で往復作業走行するための往復走行経路を生成する往復走行経路生成部と、
前記往復走行経路を目標走行経路とする自動走行を制御する自動走行制御部と、
を備える走行制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記基本辺走行軌跡に沿った作業走行は、前記圃場の最終作業走行となる請求項1に記載の走行制御システム。
【請求項3】
前記外周領域を自動で周回作業走行するための周回走行経路を生成する周回走行経路生成部が備えられている請求項1に記載の走行制御システム。
【請求項4】
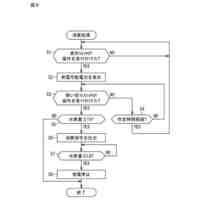
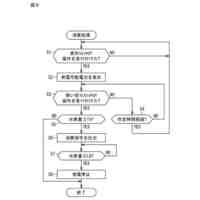
前記基本辺走行軌跡及び前記残存辺走行軌跡は、前記作業車に搭載された衛星測位ユニットからの測位データに基づいて算出され、前記衛星測位ユニットの測位不良が発生した場合、前記基本辺走行または前記残存辺走行が一時停止されるとともに前記測位不良が報知され、前記測位不良の対処策の選択が可能となる請求項1に記載の走行制御システム。
【請求項5】
前記外周領域を走行するための周回走行経路の周回数は、前記往復作業走行における2つの直進走行をつなぐ旋回走行の形態に応じて決定される請求項1に記載の走行制御システム。
【請求項6】
前記基本辺は、補給資材を前記作業車に与えるための補給辺である請求項1に記載の走行制御システム。
【請求項7】
前記基本辺の作業走行終端が前記圃場の出口箇所に位置するように、前記基本辺が設定される請求項1に記載の走行制御システム。
【請求項8】
請求項1から5のいずれか一項に記載の走行制御システムが遠隔地のコンピュータとの間で分散配置されるか、または前記走行制御システムが自機に配置される作業車。
【請求項9】
基本辺と前記基本辺以外の残存辺とによって境界付けられた圃場を走行する作業車の走行制御方法であって、
前記基本辺に沿った非作業走行である基本辺走行で取得した基本辺走行軌跡と、前記残存辺に沿った作業走行である残存辺走行で取得した残存辺走行軌跡とに基づいて、圃場形状を算出する圃場形状算出ステップと、
前記圃場形状に基づいて、前記基本辺走行軌跡と前記残存辺走行軌跡とを含む外周領域と、前記外周領域の内側の内部領域とを設定する領域設定ステップと、
前記内部領域を自動で往復作業走行するための往復走行経路を生成する往復走行経路生成ステップと、
前記往復走行経路を目標走行経路とする自動走行を制御する自動走行制御ステップと、
前記圃場の最終作業走行として前記基本辺走行軌跡に沿った作業走行を行う最終作業走行ステップと、
からなる走行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、畔辺を境界線とする圃場を走行する作業車のための走行制御システムと、走行制御方法とに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
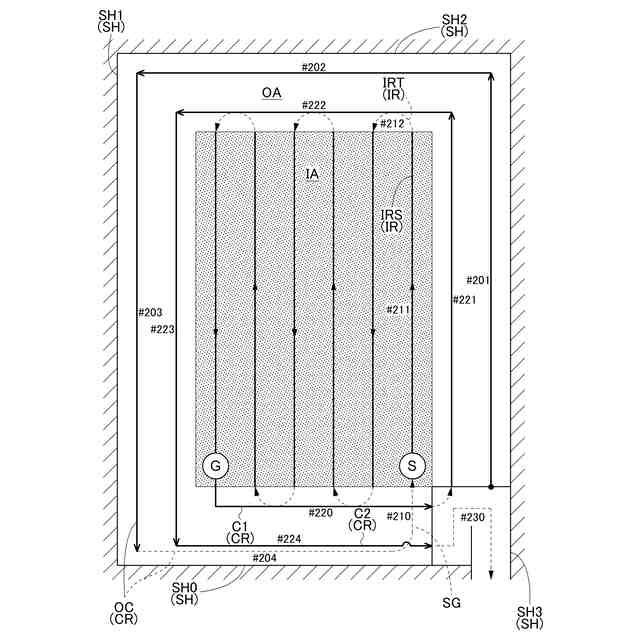
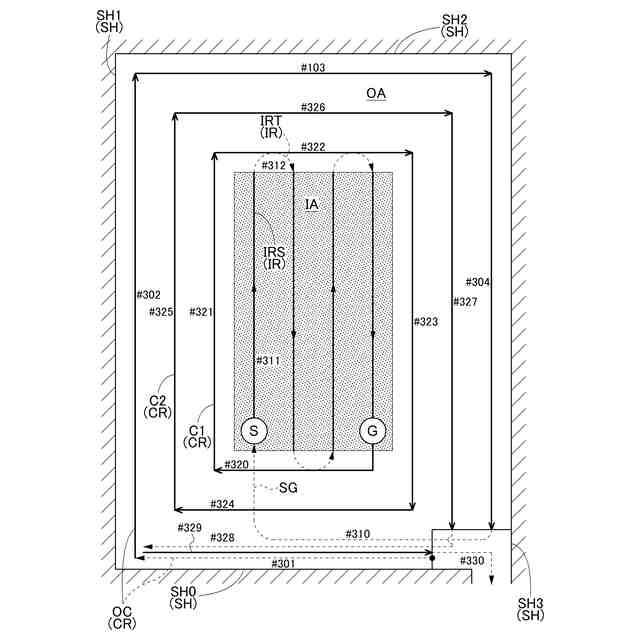
圃場を自動走行するためには、圃場に走行目標となる走行経路を設定する必要がある。この走行経路を生成するために必要となる圃場形状を求めるため、例えば、特許文献1では、作業に先立って、田植機が圃場面の最外周に沿って走行するマップ作成ティーチング走行が行われる。このティーチング走行において得られる測位ユニットからの位置信号に基づいて走行軌跡(ティーチング走行軌跡)が算出され、この走行軌跡から、圃場境界線である圃場輪郭線、つまり圃場マップが生成される。さらに、圃場マップによって規定される圃場内に、自動走行の目標となる走行経路が所定のアルゴリズムを用いて作成される。走行経路生成の一例では、圃場が外周領域と内部領域とに区分けされ、外周領域に設定される周回走行経路と、内部領域に設定される往復走行経路とが、走行経路として生成される。
【0003】
特許文献2では、まず、作業者が圃場作業車両を手動で運転して、手動運転の開始位置(作業走行を開始する作業開始位置)から圃場の外周を3辺に沿って周回作業走行(ティーチング走行)し、その際に位置・方位検出装置によって取得される自車位置情報から、圃場の形状が算出される。次に、走行経路設定装置は、算出された圃場の形状に基づいて、圃場作業車両が自動走行をする際の目標経路となる走行経路を設定する。
【先行技術文献】
【特許文献】
【0004】
特開2021-108600号公報
特開2019-154393号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
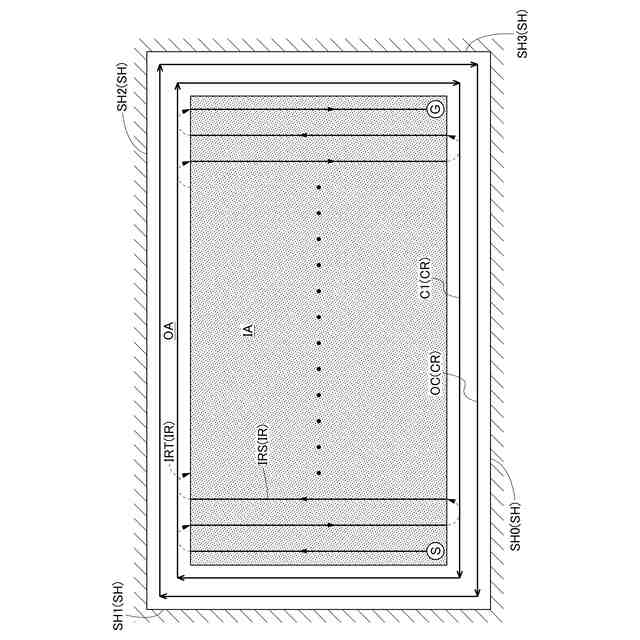
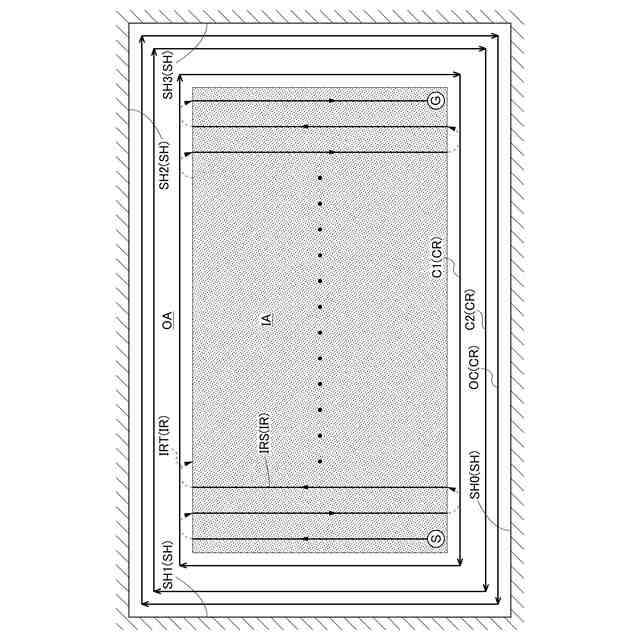
特許文献1では、ティーチング走行では、作業車は、圃場の最外周を全周にわたって走行するので、正確な圃場形状を算出することができる。しかしながら、そのティーチング走行は非作業で行われるので、最終的に、ティーチング走行された領域を再度走行して、作業しなければならず、その分だけ非効率となる。特許文献2では、圃場の3辺を作業走行して、その3辺の走行で得られた自車位置情報に基づいて、圃場形状が算出されるので、特許文献1のような効率の低下は避けられる、しかしながら、残りの1辺(圃場が矩形として)の位置・方位は測定されていないので、残りの1辺が非直線である場合、算出された圃場形状は、不正確なものとなる。
【0006】
上記実情から、本願発明の目的は、同一走行経路を非作業走行と作業走行とで重複走行する非効率を抑制しながらも、正確な圃場形状が算出される技術を提供することである。
【課題を解決するための手段】
【0007】
本発明による、基本辺と前記基本辺以外の残存辺と境界線とする圃場を走行する作業車の走行制御システムは、前記基本辺に沿った非作業走行である基本辺走行で取得した基本辺走行軌跡と、前記残存辺に沿った作業走行である残存辺走行で取得した残存辺走行軌跡とに基づいて、圃場形状を算出する圃場形状算出部と、前記圃場形状に基づいて、前記基本辺走行軌跡と前記残存辺走行軌跡とを含む外周領域と、前記外周領域の内側の内部領域とを設定する領域設定部と、前記内部領域を自動で往復作業走行するための往復走行経路を生成する往復走行経路生成部と、前記往復走行経路を目標走行経路とする自動走行を制御する自動走行制御部と、を備える。
【0008】
この構成によれば、圃場の境界線(境界辺)が、基本辺と基本辺以外の残りの辺を残像辺とに区分けされ、圃場形状を算出するための走行(ティーチング走行)では、基本辺のみ非作業走行され、その他の辺である残存辺は作業走行される。このティーチング走行により、圃場の全周の境界線の形状(圃場形状)が正確に算出される。また、基本辺に沿った走行経路だけが、まずは非作業で走行され、その後に作業をしながら走行することになるが、そのような重複走行する走行経路は基本辺に沿った最外周の走行経路だけであり、非作業走行と作業走行との重複走行による非効率は、従来に比べ、わずかである。
【0009】
本発明の好適な実施形態の1つでは、前記基本辺走行軌跡に沿った作業走行は、前記圃場の最終作業走行となる。この構成では、基本辺に沿った外周領域は、最後まで、未作業で残されているので、それまでは、旋回走行などの領域として利用することができる。また、基本辺の終端が出口付近にある場合、最終作業走行の後すぐに圃場を出ることができる。
【0010】
本発明の実施形態の1つでは、前記外周領域を自動で周回作業走行するための周回走行経路を生成する周回走行経路生成部が備えられている。これにより、外周領域の少なくとも一部の周回走行も自動走行することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管枕
5日前
株式会社クボタ
移植機
7日前
株式会社クボタ
移植機
7日前
株式会社クボタ
移植機
7日前
株式会社クボタ
移植機
7日前
株式会社クボタ
移植機
7日前
株式会社クボタ
移植機
7日前
株式会社クボタ
収穫機
7日前
株式会社クボタ
作業車
6日前
株式会社クボタ
キャビン
6日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業装置
7日前
株式会社クボタ
キャビン
6日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業機械
7日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
キャビン
6日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
7日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
7日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ