TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085462
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199353
出願日
2023-11-24
発明の名称
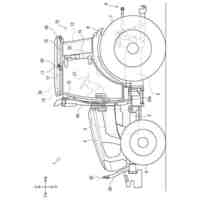
自動走行制御システム、及び作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250529BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】管理者が判断するタイミングで、自動走行している作業車が速やかに資材補給できる自動走行制御技術を提供する。
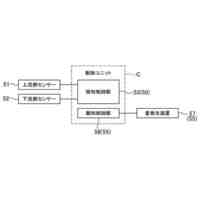
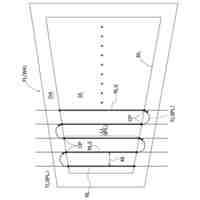
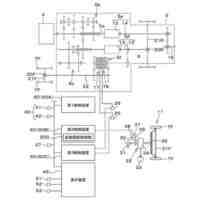
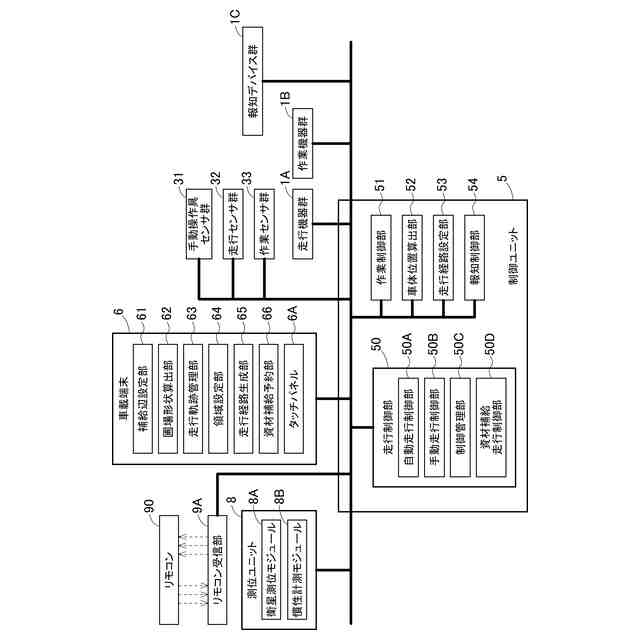
【解決手段】圃場の外周に沿う外周領域に設定された周回走行経路と、外周領域の内側の内部領域に設定されたと内部経路と旋回経路とからなる往復走行経路に沿って走行する作業車の自動走行制御システムは、作業走行において必要な資材を補給する補給辺を設定する補給辺設定部61と、内部経路の走行時において行われた人為操作に基づいて、補給辺での資材補給を予約する資材補給予約部66と、資材補給予約部66からの予約情報に基づいて、車体を資材補給姿勢で補給辺に接近させる資材補給走行制御部50Dとを備える。
【選択図】図4
特許請求の範囲
【請求項1】
圃場の外周に沿う外周領域に設定された周回走行経路と、前記外周領域の内側の内部領域に設定されたと内部経路と旋回経路とからなる往復走行経路に沿って走行する作業車の自動走行制御システムであって、
作業走行において必要な資材を補給する補給辺を設定する補給辺設定部と、
前記内部経路の走行時において行われた人為操作に基づいて、前記補給辺での資材補給を予約する資材補給予約部と、
前記資材補給予約部からの予約情報に基づいて、車体を資材補給姿勢で前記補給辺に接近させる資材補給走行制御部と、
を備える自動走行制御システム。
続きを表示(約 910 文字)
【請求項2】
前記旋回経路の走行時での前記資材補給の予約は禁止される請求項1に記載の自動走行制御システム。
【請求項3】
前記内部経路の走行時に前記資材補給が予約された場合、走行中の前記内部経路での走行終了点と次に走行する前記内部経路での走行開始点との間で、前記資材補給が行われ、前記資材補給走行制御部は、当該内部経路から前記補給辺に向かって延長された延長経路を目標走行経路として、前記車体を前記補給辺に接近させる請求項1に記載の自動走行制御システム。
【請求項4】
前記資材補給走行制御部は、前記予約情報に基づいて、前記補給辺における補給点で前記車体を補給停車させる請求項1に記載の自動走行制御システム。
【請求項5】
前記資材補給走行制御部は、前記予約情報に含まれる前記資材の種類に適合する前記資材補給姿勢で前記車体を補給停車させる請求項4に記載の自動走行制御システム。
【請求項6】
前記資材の前記種類が植付苗または植付種の場合、前記資材補給姿勢は、前記車体の前端を前記補給辺に突合せた前突合せ姿勢であり、
前記資材の前記種類が肥料または薬剤の場合、前記資材補給姿勢は、前記車体の後端を前記補給辺に突合わせた後突合せ姿勢である請求項5に記載の自動走行制御システム。
【請求項7】
前記資材補給予約部は、前記車体の停車中または走行中のいずれにおいても前記資材補給を予約する請求項1に記載の自動走行制御システム。
【請求項8】
前記予約情報に基づいて、報知デバイスを通じて資材補給予約を報知する報知制御部が備えられている請求項1に記載の自動走行制御システム。
【請求項9】
前記報知デバイスは、前記作業車の搭乗員から遠ざかる方向の指向性を有する報知音または報知光を放出する請求項8に記載の自動走行制御システム。
【請求項10】
前記報知デバイスは、ヘッドライトまたは方向指示器あるいはその両方である請求項8に記載の自動走行制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、資材補給されながら圃場を作業走行する作業車のための自動走行制御システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
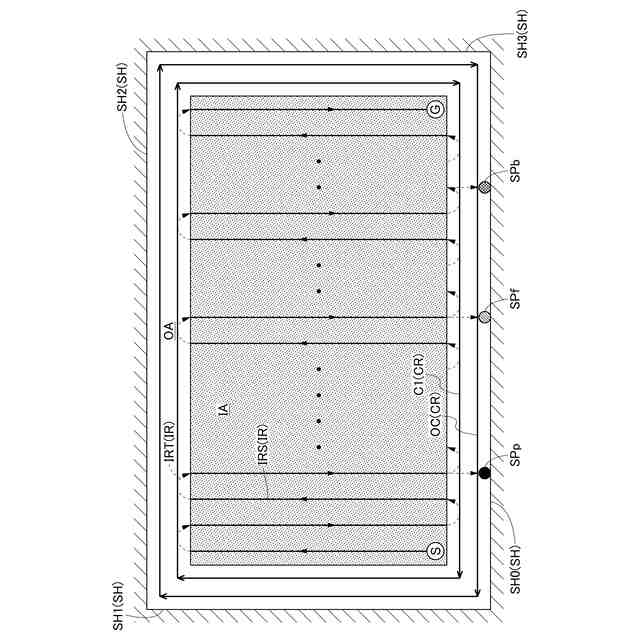
田植機のような圃場作業車は、圃場の外周に沿う外周領域に設定された周回経路と、当該外周領域の内側の内部領域に設定されたと直進経路と旋回経路とからなる内部往復走行経路に沿って、圃場に苗などの資材を供給しながら作業走行する。圃場作業車に積み込まれる資材の量はかぎられているので、作業走行の途中で、資材の補給が必要になる。
【0003】
特許文献1による田植機は、農場の外形の特定辺、例えば農道に接している辺を資材補給辺として設定し、旋回経路とともに内部往復走行経路を構成する直進経路の苗補給辺に向き合う終了点で苗補給を行うか否かを選択するために、常に一時停車する。苗の補給が必要なときは、人為的に補給指示を行うことで、田植機は、苗補給辺に向かって手動で走行し、苗補給に適切な位置に停車する。
【0004】
特許文献2による田植機は、直進経路の苗補給辺に向き合う終了点で毎回一時停止する代わりに、田植機に積み込まれている資材の残量を直進経路走行の往復回数、または走行距離によって推定し、所定の往復回数、または走行距離に達した場合に、直進経路の苗補給辺に向き合う終了点で苗補給を行うか否かを選択するために、一時停止する。
【先行技術文献】
【特許文献】
【0005】
特開2022-085684号公報
特開2023-039843号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献2による田植機は、特許文献1による田植機に比べ、不要な作業走行の停止と作業走行を再開させるための操作とを行うことが抑制されるという利点がある。しかしながら、資材の残量を直進経路走行の往復回数、または走行距離で推定することは、比較的困難であり、この資材補給タイミングの判定方法が、必ずしも効率的であるとは限らない。また、管理者(運転者や監視者などを含む)よっては、自らの意思で、資材補給タイミングを決定したいという要望もある。
【0007】
上記実情に鑑み、本発明の目的は、管理者が判断するタイミングで、自動走行している作業車が速やかに資材補給できる自動走行制御技術を提供することである。
【課題を解決するための手段】
【0008】
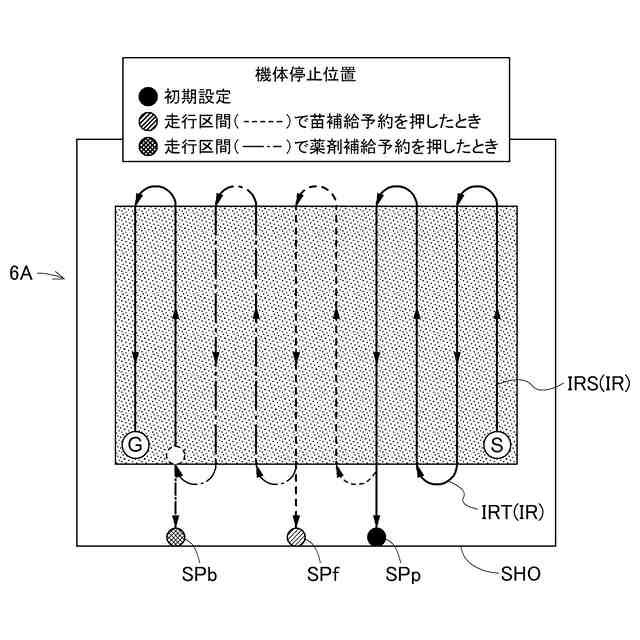
圃場の外周に沿う外周領域に設定された周回走行経路と、前記外周領域の内側の内部領域に設定されたと内部経路と旋回経路とからなる往復走行経路に沿って走行する作業車のための、本発明による自動走行制御システムは、作業走行において必要な資材を補給する補給辺を設定する補給辺設定部と、前記内部経路の走行時において行われた人為操作に基づいて、前記補給辺での資材補給を予約する資材補給予約部と、前記資材補給予約部からの予約情報に基づいて、車体を資材補給姿勢で前記補給辺に接近させる資材補給走行制御部とを備える。
【0009】
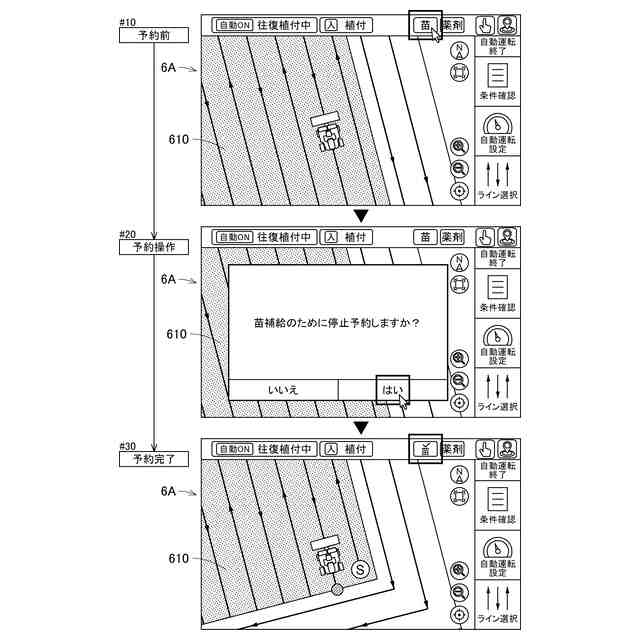
この構成によれば、旋回経路によって接続されることで往復走行経路を構成する内部経路を作業車が走行している際に、補給辺での資材補給を予約すると、田植機は資材補給姿勢で補給辺に接近する。これにより、管理者は、自分の所望するタイミングで田植機を補給辺に寄せつけ、資材補給を行うことができる。
【0010】
往復走行経路を用いた往復走行において、実質的に180°の車体方向転換である旋回経路での走行制御の制御負担は、略直線状または略円弧線状である内部経路での走行制御の制御負担に較べて低い。また旋回経路の走行は、圃場の境界線に接近した走行であり、操舵エラーは回避しなければならない。このことから、本発明では、制御系に負担をかけないために、前記旋回経路の走行時での前記資材補給の予約は禁止される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
20日前
株式会社クボタ
移植機
6日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
6日前
株式会社クボタ
田植機
6日前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
多目的車両
15日前
株式会社クボタケミックス
排水集合管
今日
株式会社クボタ
電動作業車両
15日前
株式会社クボタケミックス
電気融着継手
8日前
株式会社クボタ
嫌気性処理方法
13日前
株式会社クボタケミックス
セグメント曲管
9日前
株式会社クボタ
浮遊物観測装置
7日前
株式会社クボタ
状態量表示システム及び作業車
6日前
株式会社クボタ
経路生成システムおよび作業機
7日前
株式会社クボタ
画面遷移制御システム及び作業車
6日前
株式会社クボタ
パラメータ管理システム及び作業車
6日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
1日前
株式会社クボタ
作業機、プログラム、及びその記録媒体
1日前
株式会社クボタ
メタン発酵装置およびメタン発酵処理方法
9日前
株式会社クボタケミックス
管継手カバー、排水集合管、および配管構造
1日前
株式会社クボタ
収穫残渣の保管方法およびメタン発酵処理方法
13日前
株式会社クボタ
イオン濃度測定方法およびイオン濃度測定装置
13日前
株式会社クボタ
回転式表面溶融炉および回転式表面溶融炉の運転方法
6日前
株式会社クボタ
表示制御装置、作業機、プログラム、及びその記録媒体
1日前
株式会社クボタ
表示制御装置、作業機、プログラム、及びその記録媒体
1日前
株式会社クボタ
作業車両
6日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
コンバイン
6日前
株式会社クボタ
電動作業車
1日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ