TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096307
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2025058849,2024168140
出願日
2025-03-31,2018-10-04
発明の名称
作業車両
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20250619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】測位装置による測位誤差(測位精度)の影響があっても車体を走行予定ラインに沿って走行させることができるようにする。
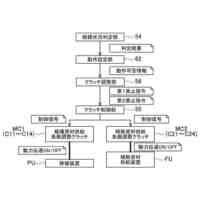
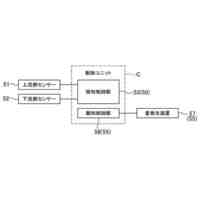
【解決手段】作業車両は、車体と、連結部と、ステアリングハンドルと、車体位置を検出する測位装置と、測位装置で検出された車体位置と、自動操舵機構と、測位装置で検出された車体位置と走行予定ラインとの偏差を表示可能な表示装置と、補正量を設定するための補正スイッチと、を備え、自動操舵機構は、補正スイッチが設定した補正量で変更された偏差に基づいて自動操舵が可能であり、表示装置は、補正スイッチの操作単位の補正量を変更する画面を表示する。
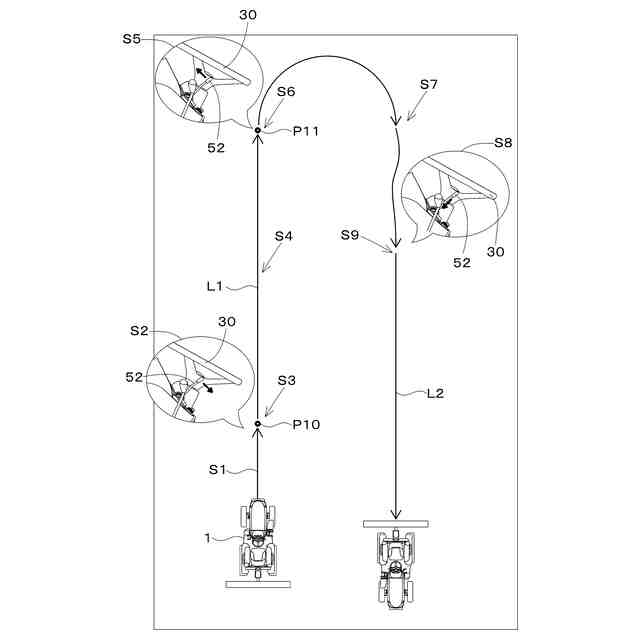
【選択図】図1
特許請求の範囲
【請求項1】
走行可能な車体と、
作業を行う作業装置を前記車体に連結可能な連結部と、
前記車体の操舵を回転の操作によって行うステアリングハンドルと、
前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体位置を検出する測位装置と、
前記測位装置で検出された車体位置と、走行予定ラインに基づいて前記車体を自動操舵可能な自動操舵機構と、
前記測位装置で検出された車体位置と前記走行予定ラインとの偏差を表示可能な表示装置と、
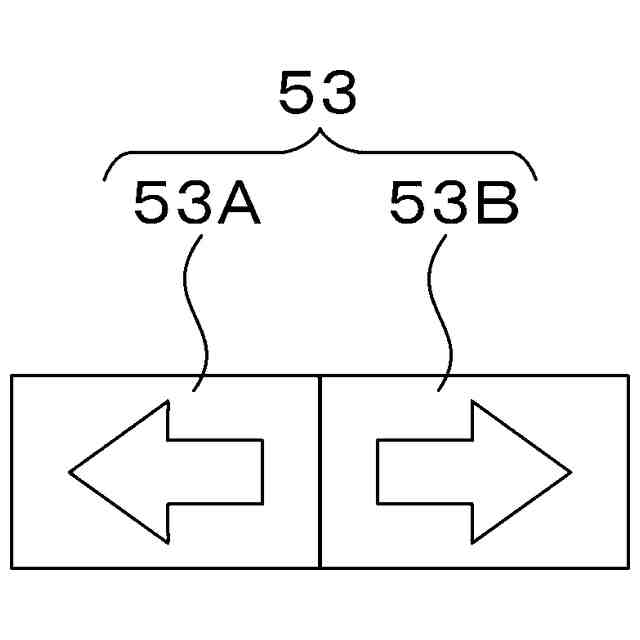
補正量を設定するための補正スイッチと、
を備え、
前記自動操舵機構は、前記補正スイッチが設定した前記補正量で変更された前記偏差に基づいて前記自動操舵が可能であり、
前記表示装置は、前記補正スイッチの操作単位の補正量を変更する画面を表示する作業車両。
続きを表示(約 740 文字)
【請求項2】
前記補正スイッチが接続され、且つ、前記自動操舵機構を制御する制御装置を備え、
前記制御装置は、前記補正スイッチの操作回数に基づいて、前記補正量を設定し、
前記操作単位の補正量は、前記補正スイッチの1回の操作当たりの補正量である請求項1に記載の作業車両。
【請求項3】
前記制御装置は、前記画面に表示され、且つ前記操作単位の補正量の入力を受け付ける設定入力部に入力された情報に基づいて、前記補正スイッチの1回当たりの操作に対応する前記補正量を変更する請求項2に記載の作業車両。
【請求項4】
前記補正スイッチが接続され、且つ、前記自動操舵機構を制御する制御装置を備え、
前記制御装置は、前記補正スイッチの操作量に基づいて、前記補正量を設定し、
前記操作単位の補正量は、前記補正スイッチの所定の操作量当たりの補正量である請求項1に記載の作業車両。
【請求項5】
前記制御装置は、前記画面に表示され、且つ前記操作単位の補正量の入力を受け付ける設定入力部に入力された情報に基づいて、前記補正スイッチの操作量当たりの前記補正量を変更する請求項4に記載の作業車両。
【請求項6】
前記表示装置は、
前記走行予定ラインの設定に用いられる走行基準ラインの始点が設定された場合に、前記画面にて第1アイコンを表示し、
前記走行基準ラインの終点が設定された場合に、前記画面にて第2アイコンを表示する請求項1~5のいずれか1項に記載の作業車両。
【請求項7】
前記連結部に連結される前記作業装置を備える請求項1~6のいずれか1項に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、トラクタ等の作業車両に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、農作業機として特許文献1が知られている。特許文献1の農作業機は、手動操舵による手動走行と、基準走行ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2017-123803号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の農作業機では、GPS等による機体の位置の検出をして基準走行ラインの設定、設定走行ライン等を行っているため、機体の操舵、走行等においてGPS等の位置の測位の影響を軽減することができないのが実情である。
【0005】
そこで、本発明は上記問題点に鑑み、測位装置による測位誤差(測位精度)の影響があっても車体を走行予定ラインに沿って走行させることができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
この技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。
【0007】
作業車両は、走行可能な車体と、作業を行う作業装置を前記車体に連結可能な連結部と、前記車体の操舵を回転の操作によって行うステアリングハンドルと、前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体位置を検出する測位装置と、前記測位装置で検出された車体位置と、走行予定ラインに基づいて前記車体を自動操舵可能な自動操舵機構と、前記測位装置で検出された車体位置と前記走行予定ラインとの偏差を表示可能な表示装置と、補正量を設定するための補正スイッチと、を備え、前記自動操舵機構は、前記補正スイッチが設定した前記補正量で変更された前記偏差に基づいて前記自動操舵が可能であり、前記表示装置は、前記補正スイッチの操作単位の補正量を変更する画面を表示する。
【0008】
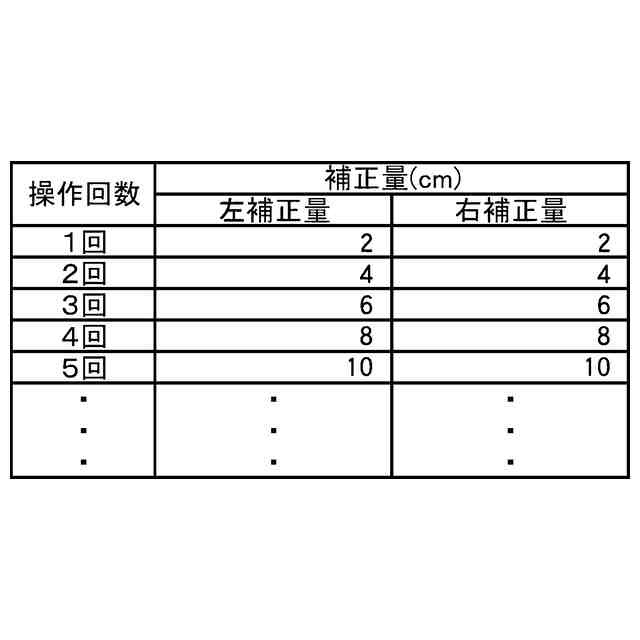
作業車両は、前記補正スイッチが接続され、且つ、前記自動操舵機構を制御する制御装置を備え、前記制御装置は、前記補正スイッチの操作回数に基づいて、前記補正量を設定し、前記操作単位の補正量は、前記補正スイッチの1回の操作当たりの補正量である。
【0009】
前記制御装置は、前記画面に表示され、且つ前記操作単位の補正量の入力を受け付ける設定入力部に入力された情報に基づいて、前記補正スイッチの1回当たりの操作に対応する前記補正量を変更する。
【0010】
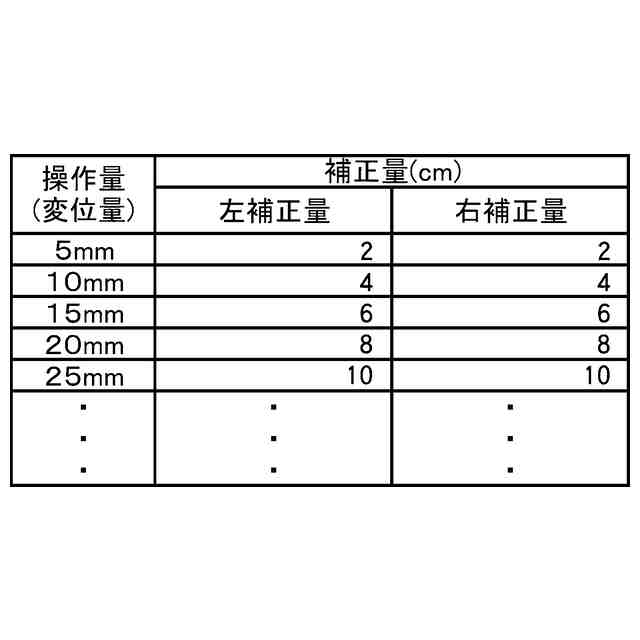
前記補正スイッチが接続され、且つ、前記自動操舵機構を制御する制御装置を備え、前記制御装置は、前記補正スイッチの操作量に基づいて、前記補正量を設定し、前記操作単位の補正量は、前記補正スイッチの所定の操作量当たりの補正量である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
24日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業機
17日前
株式会社クボタ
作業車
3日前
株式会社クボタ
田植機
3日前
株式会社クボタ
移植機
3日前
株式会社クボタ
作業車
3日前
株式会社クボタ
多目的車両
12日前
株式会社クボタ
圃場作業車
19日前
株式会社クボタ
歩行型作業機
19日前
株式会社クボタ
電動作業車両
19日前
株式会社クボタ
電動作業車両
12日前
株式会社クボタ
乗用型田植機
19日前
株式会社クボタケミックス
電気融着継手
5日前
株式会社クボタ
嫌気性処理方法
10日前
株式会社クボタケミックス
セグメント曲管
6日前
株式会社クボタ
浮遊物観測装置
4日前
株式会社クボタ
燃料噴射装置およびエンジン
23日前
株式会社クボタ
経路生成システムおよび作業機
4日前
株式会社クボタ
状態量表示システム及び作業車
3日前
株式会社クボタ
移植機及び苗ステーの固定方法
20日前
株式会社クボタ
画面遷移制御システム及び作業車
3日前
株式会社クボタ
作業機及びカバー部材の固定方法
18日前
株式会社クボタ
パラメータ管理システム及び作業車
3日前
株式会社クボタ
メタン発酵装置およびメタン発酵処理方法
6日前
株式会社クボタ
収穫残渣の保管方法およびメタン発酵処理方法
10日前
株式会社クボタ
イオン濃度測定方法およびイオン濃度測定装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ