TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085698
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2025039535,2021147163
出願日
2025-03-12,2021-09-09
発明の名称
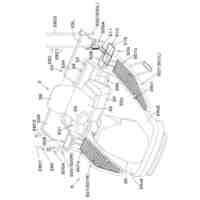
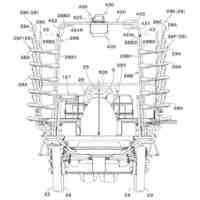
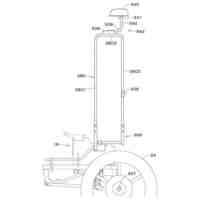
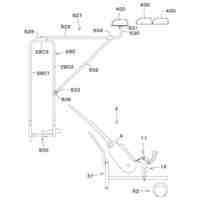
自動走行制御システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250529BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】効率的に農業資材の補給、または収穫した農作物の排出を行うことを目的とする。
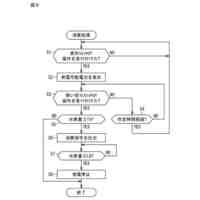
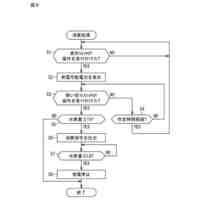
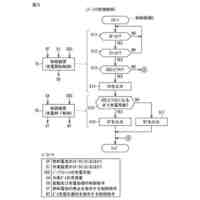
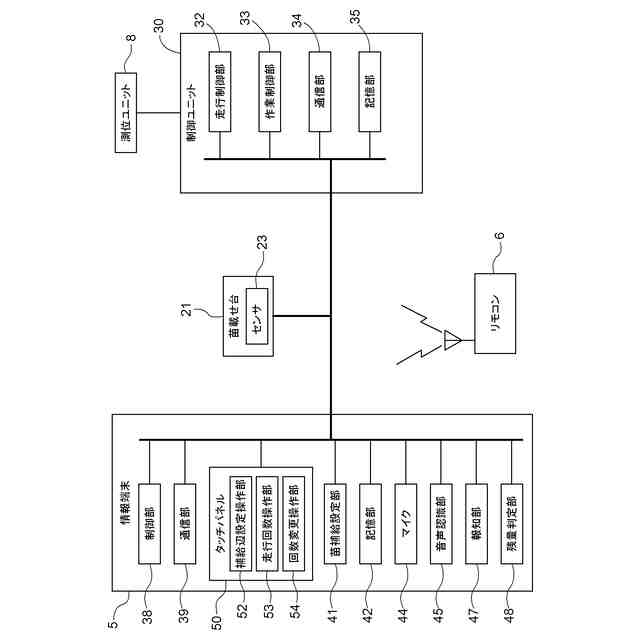
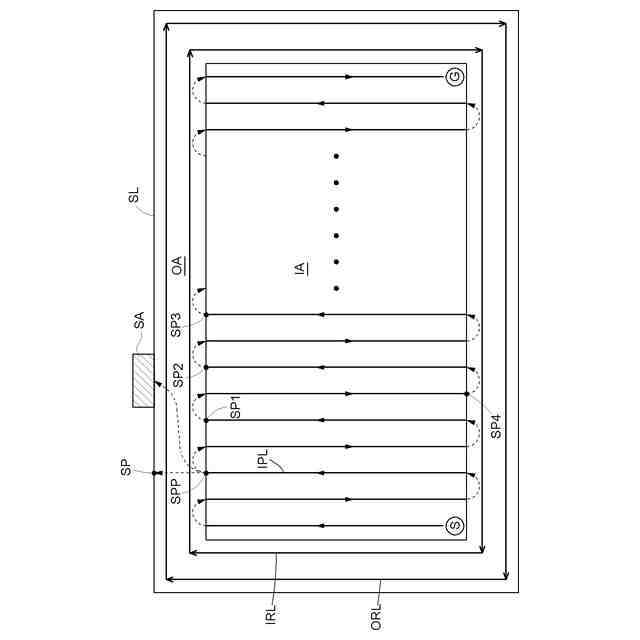
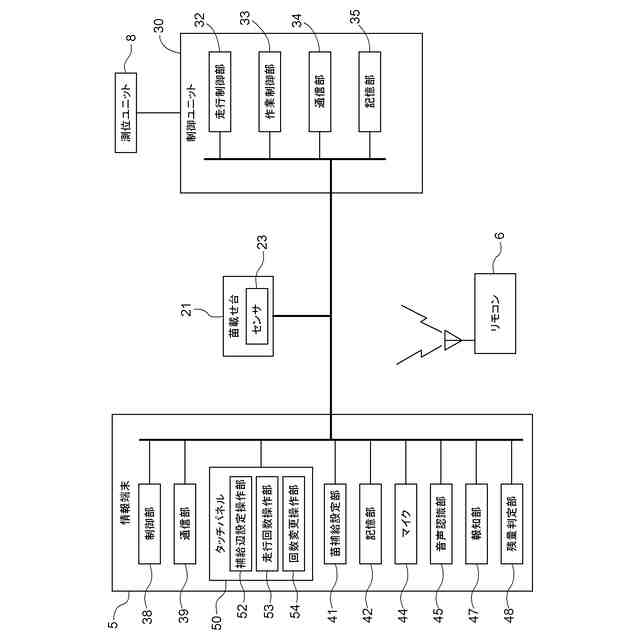
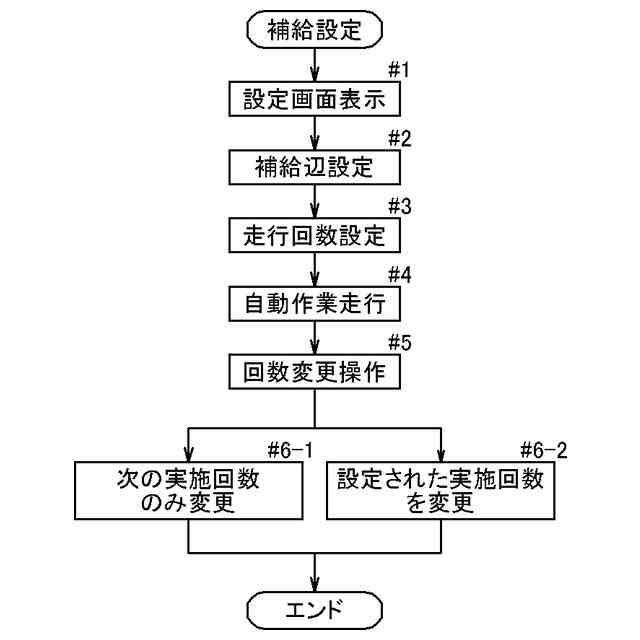
【解決手段】内部経路と旋回経路とからなる走行経路を走行する自動往復走行を繰り返すことにより圃場に農業資材を供給する圃場作業を行う圃場作業車の自動走行制御システムであって、圃場作業車は、所定の補給辺で資材補給を行うために、所定の走行回数での内部経路の走行を行う度に走行を停止する補給準備処理を行い、補給準備処理を含む自動走行を制御する走行制御部32とを備える。
【選択図】図3
特許請求の範囲
【請求項1】
内部経路と旋回経路とからなる走行経路を走行する自動往復走行を繰り返すことにより圃場に農業資材を供給する圃場作業を行う圃場作業車の自動走行制御システムであって、
前記圃場作業車は、所定の補給辺で資材補給を行うために、所定の走行回数での前記内部経路の走行を行う度に走行を停止する補給準備処理を行い、
前記補給準備処理を含む自動走行を制御する走行制御部とを備える自動走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
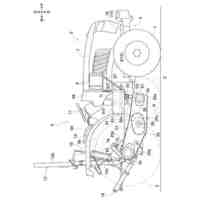
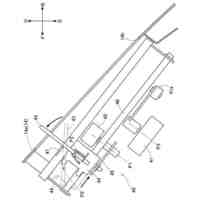
本発明は、自動走行しながら農業資材を圃場に供給し、または、収穫した農作物を排出する圃場作業車の自動作業走行を制御する自動走行制御システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
圃場に農業資材を供給する自動作業走行を行う圃場作業車は、自動作業走行中に、農業資材の補給、または収穫した農作物の排出を行う。
【0003】
特許文献1に開示された圃場作業車(田植機)は、圃場を往復する毎に機体を停止させ、農業資材(苗)を補給する必要がある場合は農業資材の補給を行い、農業資材を補給する必要がない場合は作業走行を継続している。
【先行技術文献】
【特許文献】
【0004】
特開2021-106613号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、自動作業走行において、さらに効率的に農業資材の補給を行ことが求められている。
【0006】
本発明は、効率的に農業資材の補給、または収穫した農作物の排出を行うことを目的とする。
【課題を解決するための手段】
【0007】
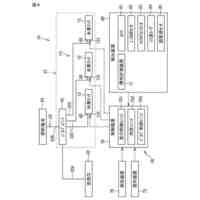
上記目的を達成するために、本発明の一実施形態に係る自動走行制御システムは、内部経路と旋回経路とからなる走行経路を走行する自動往復走行を繰り返すことにより圃場に農業資材を供給する圃場作業を行う圃場作業車の自動走行制御システムであって、前記圃場作業車は、所定の補給辺で資材補給を行うために、所定の走行回数での前記内部経路の走行を行う度に走行を停止する補給準備処理を行い、前記補給準備処理を含む自動走行を制御する走行制御部と、前記圃場作業を制御する作業制御部と、前記走行回数の選択を受け付ける走行回数操作部と、前記走行回数操作部への入力に応じて前記走行回数を設定する資材補給設定部とを備える。
【0008】
本発明の一実施形態に係る圃場作業車は、内部経路と旋回経路とからなる走行経路を走行する自動往復走行を繰り返すことにより圃場に農業資材を供給する圃場作業を行い、所定の補給辺で資材補給を行うために、所定の走行回数での前記内部経路の走行を行う度に走行を停止する補給準備処理を行う圃場作業車であって、前記圃場作業を行う作業装置と、前記補給準備処理を含む自動走行を制御する走行制御部と、前記圃場作業を制御する作業制御部と、前記走行回数の選択を受け付ける走行回数操作部と、前記走行回数操作部への入力に応じて前記走行回数を設定する資材補給設定部とを備える。
【0009】
以上のような構成により、搭載される農業資材で作業走行を行うことができる走行距離に応じた走行回数毎に補給準備処理を行うことができるため、不要な補給準備処理による停止と走行再開操作を抑制し、効率的に農業資材の補給を行い、効率的な作業走行を行うことができる。
【0010】
本発明の一実施形態に係る自動走行制御システムは、内部経路と旋回経路とからなる走行経路を走行する自動往復走行を繰り返すことにより圃場から農作物を収穫する圃場作業を行う圃場作業車の自動走行制御システムであって、前記圃場作業車は、所定の排出辺で収穫した前記農作物を排出するために、所定の走行回数での前記内部経路の走行を行う度に走行を停止する排出準備処理を行い、前記排出準備処理を含む自動走行を制御する走行制御部と、前記圃場作業を制御する作業制御部と、前記走行回数の選択を受け付ける走行回数操作部と、前記走行回数操作部への入力に応じて前記走行回数を設定する資材排出設定部とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
移植機
今日
株式会社クボタ
移植機
今日
株式会社クボタ
移植機
今日
株式会社クボタ
移植機
今日
株式会社クボタ
移植機
今日
株式会社クボタ
収穫機
今日
株式会社クボタ
作業機
5日前
株式会社クボタ
収穫機
5日前
株式会社クボタ
移植機
今日
株式会社クボタ
移植機
1日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
7日前
株式会社クボタ
移植機
1日前
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
エンジン
今日
株式会社クボタ
作業機械
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業機械
今日
株式会社クボタ
作業機械
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
エンジン
今日
株式会社クボタ
エンジン
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
作業装置
今日
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ