TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059621
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169829
出願日
2023-09-29
発明の名称
搬送車
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250403BHJP(制御;調整)
要約
【課題】効率よく物体を検知することができる搬送車を提供する。
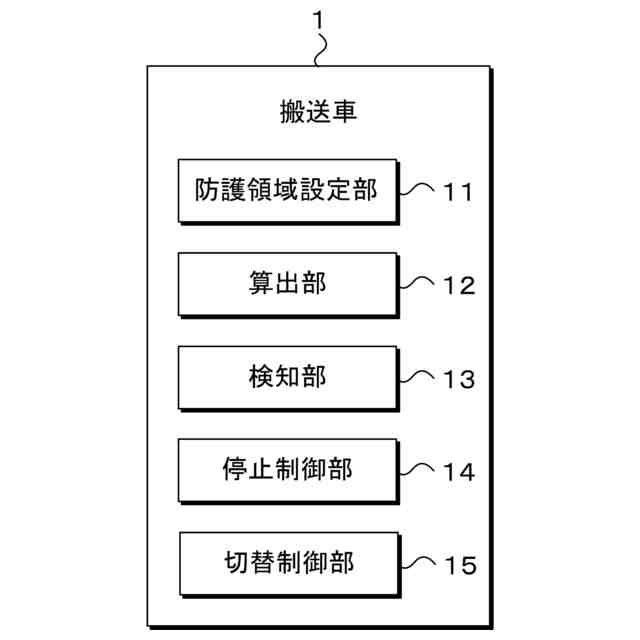
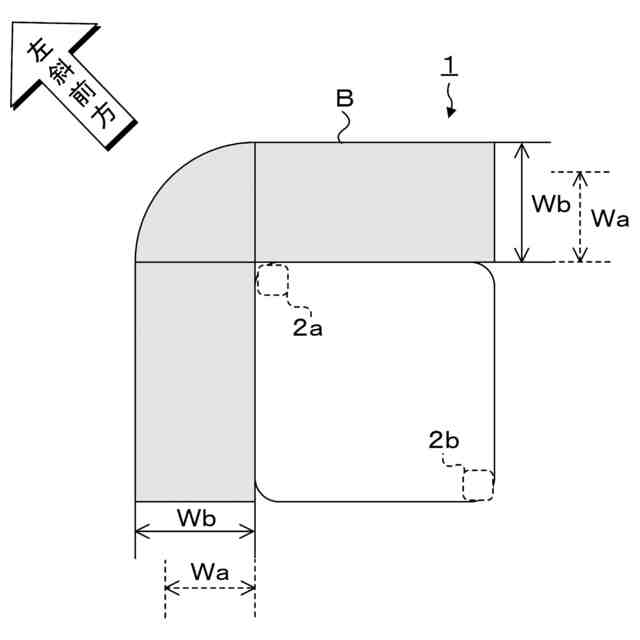
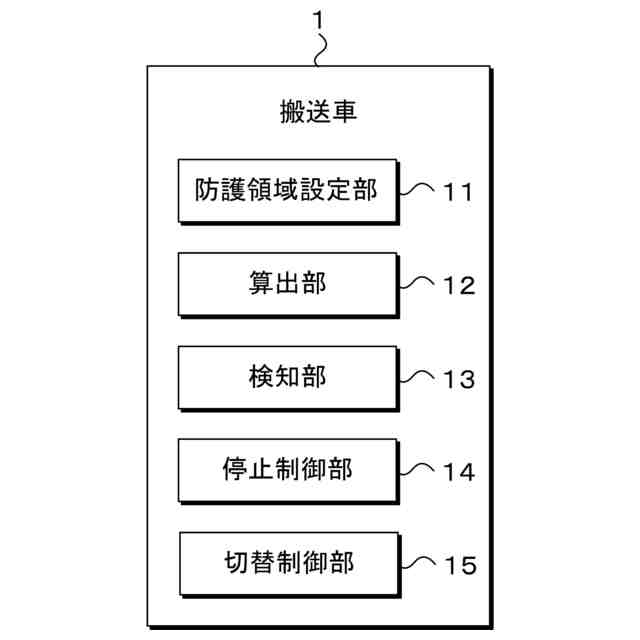
【解決手段】搬送車1は、車体の周囲に防護領域を設ける防護領域設定部11と、車体の進行方向を算出する算出部12と、防護領域の範囲内に物体が検知された場合に、車体を停止させる停止制御部14と、車体の進行方向に基づいて、車体の周囲のうち、防護領域を設ける箇所を切り替える切替制御部15と、を備える。
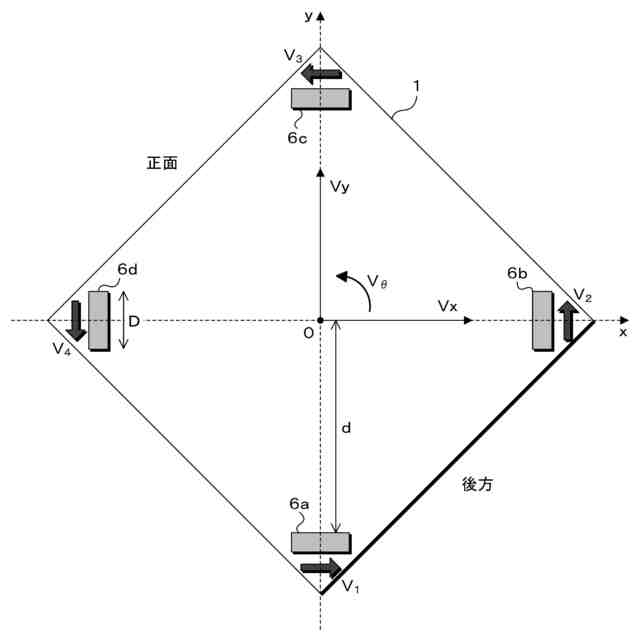
【選択図】図6
特許請求の範囲
【請求項1】
車体の周囲に防護領域を設ける防護領域設定部と、
前記車体の進行方向を算出する算出部と、
前記防護領域の範囲内に物体が検知された場合に、前記車体を停止させる停止制御部と、
前記車体の進行方向に基づいて、前記車体の周囲のうち、前記防護領域を設ける箇所を切り替える切替制御部と、
を備える搬送車。
続きを表示(約 430 文字)
【請求項2】
前記算出部は、前記車体の速度をさらに算出し、
前記切替制御部は、前記車体の速度に基づいて、前記車体の周縁から前記防護領域を張り出させる幅をさらに切り替える、
請求項1記載の搬送車。
【請求項3】
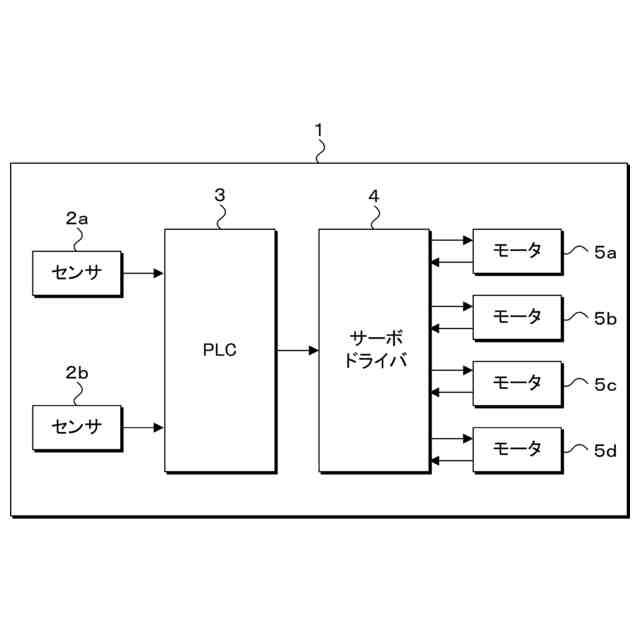
前記車体の移動機構に含まれる複数のモータと、
前記モータの動作状況をそれぞれ検出する複数のエンコーダと、
をさらに備え、
前記算出部は、前記エンコーダの出力値に基づいて、前記車体の進行方向を算出する、
請求項1記載の搬送車。
【請求項4】
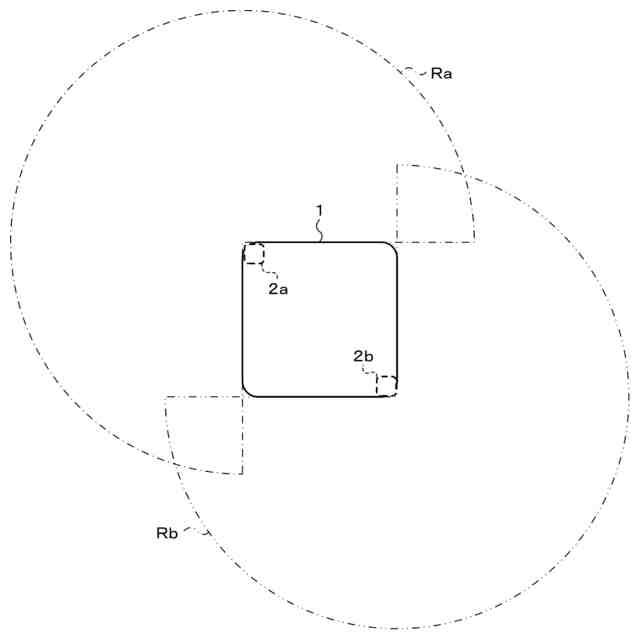
前記防護領域は、前記車体の周辺に存在し得る物体までの距離を測定するセンサの走査範囲内に設けられる、
請求項1記載の搬送車。
【請求項5】
前記センサにより測定された物体までの距離に基づいて、前記防護領域の範囲内に物体があることを検知する検知部をさらに備える、
請求項4記載の搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行可能な搬送車に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
下記特許文献1には、床面を無人で走行する無人搬送車(AGV:Automatic Guided Vehicle)が開示されている。この無人搬送車は、前後左右の各側面にレーザースキャナを配置し、それぞれのレーザースキャナが矩形状のセンシング領域を無人搬送車の前後左右に設ける。各センシング領域には、その領域内のうち内側に設けられる防護領域と、防護領域の外側に設けられる警告領域とが含まれる。警告領域に作業者が進入すると、無人搬送車が減速し、防護領域に作業者が進入すると、無人搬送車が停止する。
【先行技術文献】
【特許文献】
【0003】
特許第7137609号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の無人搬送車は、車体の前後左右に設けられる防護領域の全ての範囲を監視する。しかしながら、無人搬送車の走行状況によっては、監視する必要がない範囲もあり、前後左右に設けられる防護領域の全ての範囲を常に監視し続けるのは、効率が悪い。
【0005】
そこで、本発明は、効率よく物体を検知することができる搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
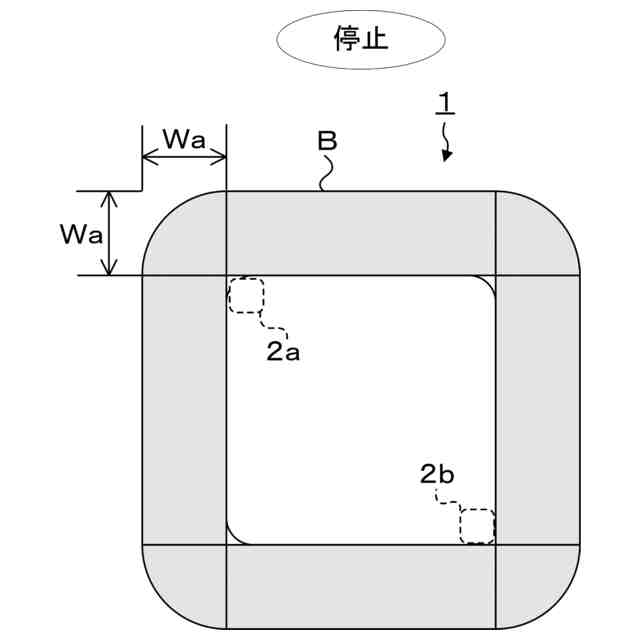
本発明の一態様による搬送車は、車体の周囲に防護領域を設ける防護領域設定部と、車体の進行方向を算出する算出部と、防護領域の範囲内に物体が検知された場合に、車体を停止させる停止制御部と、車体の進行方向に基づいて、車体の周囲のうち、防護領域を設ける箇所を切り替える切替制御部と、を備える。
【0007】
この態様によれば、車体の周囲のうち、防護領域を設ける箇所を車体の進行方向に基づいて切り替えることができ、その防護領域の範囲内に物体が検知されたときに、車体を停止させることができる。これにより、防護の必要性が低い箇所の防護領域を省くことが可能となる。
【0008】
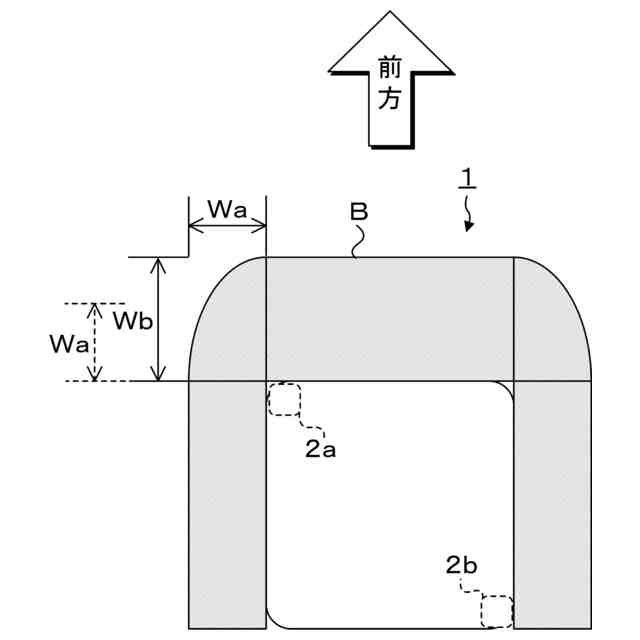
上記態様において、算出部は、車体の速度をさらに算出し、切替制御部は、車体の速度に基づいて、車体の周縁から防護領域を張り出させる幅をさらに切り替えてもよい。
【0009】
この態様によれば、車体の周囲に設ける防護領域の幅を車体の速度に基づいて切り替えることができるため、例えば、狭い場所を走行するときに車体の速度を落とすと、防護領域の幅を縮めることが可能となる。
【0010】
上記態様において、車体の移動機構に含まれる複数のモータと、モータの動作状況をそれぞれ検出する複数のエンコーダと、をさらに備え、算出部は、エンコーダの出力値に基づいて、車体の進行方向を算出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
変圧器
16日前
株式会社ダイヘン
電源装置
3日前
株式会社ダイヘン
溶接電源装置
8日前
株式会社ダイヘン
固相接合装置
10日前
株式会社ダイヘン
溶接電源装置
10日前
株式会社ダイヘン
高周波電源装置
16日前
株式会社ダイヘン
コイル及び電力授受装置
1日前
株式会社ダイヘン
パルスアーク溶接制御方法
2日前
株式会社ダイヘン
パルスアーク溶接制御方法
2日前
株式会社ダイヘン
パルスアーク溶接制御方法
2日前
株式会社ダイヘン
固相接合装置および固相接合方法
10日前
株式会社ダイヘン
制御回路、および、蓄電池システム
10日前
株式会社ダイヘン
集積構造体及びバッテリーパックの集積方法
16日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
15日前
愛知製鋼株式会社
目標軌跡の設定方法
4日前
ローム株式会社
半導体集積回路
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
1日前
株式会社鷺宮製作所
制御装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
24日前
株式会社オプトン
制御プログラム生成装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
8日前
アズビル株式会社
制御システムおよび制御方法
4日前
株式会社タブチ
減圧弁
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ