TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025059669
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169905
出願日
2023-09-29
発明の名称
搬送車
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250403BHJP(制御;調整)
要約
【課題】回路構成を複雑にせず、コストを抑えて異常を検知することができる搬送車を提供する。
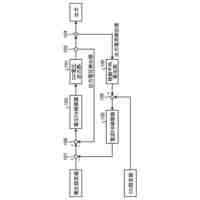
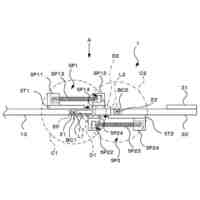
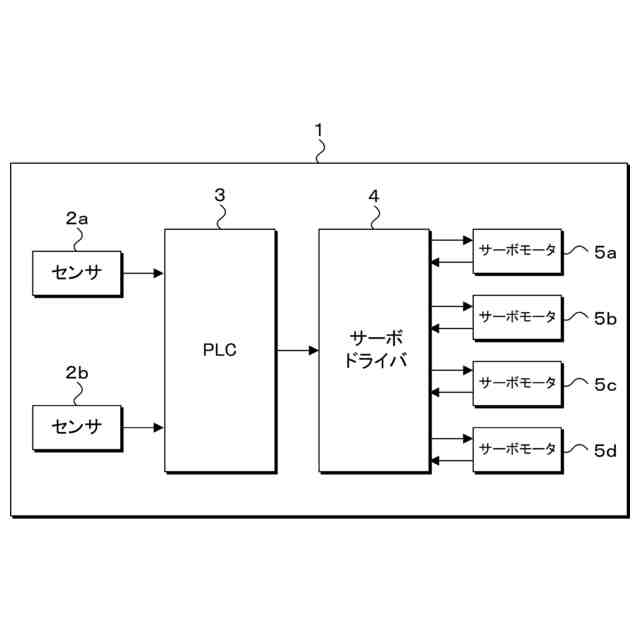
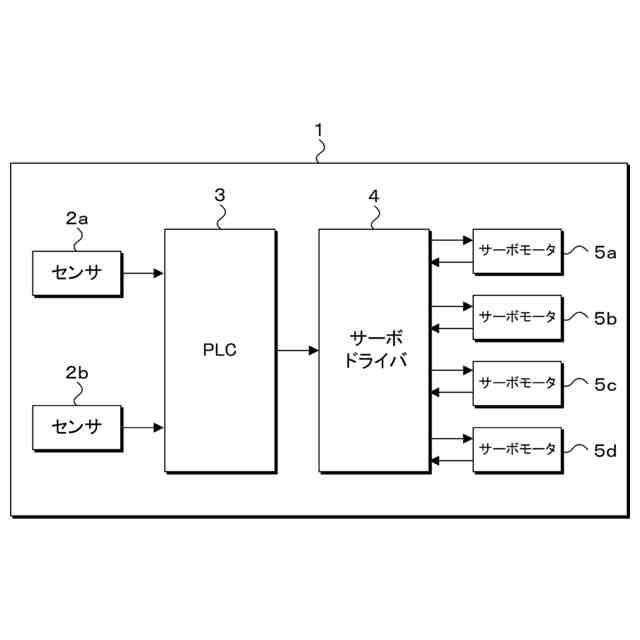
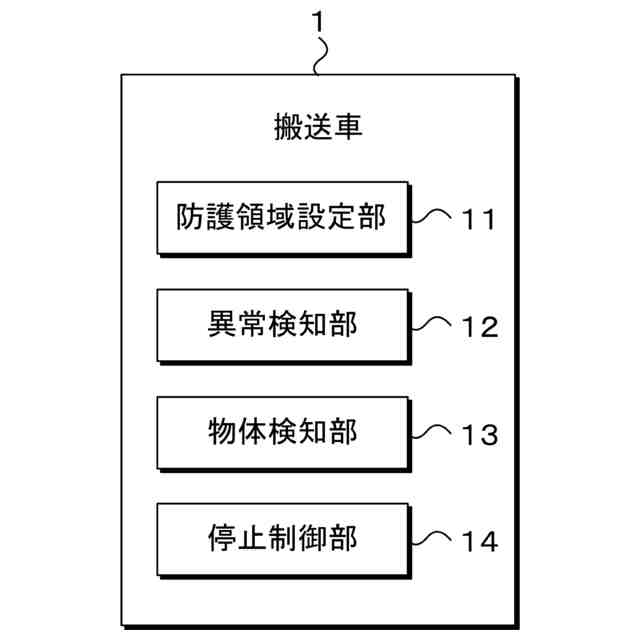
【解決手段】搬送車1は、車体の移動機構に含まれるモータに対する目標値に基づいて、モータに駆動電圧を供給するサーボドライバ4と、モータの動作状況を検出してサーボドライバ4にフィードバックするエンコーダと、目標値及びエンコーダの検出値に基づいて、エンコーダからサーボドライバ4にエンコーダの検出値をフィードバックする経路に異常があることを検知する異常検知部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
車体の移動機構に含まれるモータに対する目標値に基づいて、前記モータに駆動電圧を供給するサーボドライバと、
前記モータの動作状況を検出して前記サーボドライバにフィードバックするエンコーダと、
前記目標値及び前記エンコーダの検出値に基づいて、前記エンコーダから前記サーボドライバに前記エンコーダの検出値をフィードバックする経路に異常があることを検知する異常検知部と、
を備える搬送車。
続きを表示(約 520 文字)
【請求項2】
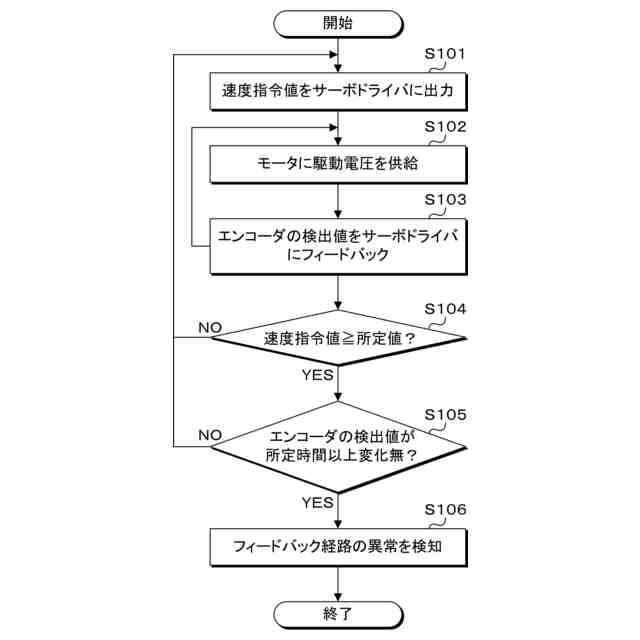
前記異常検知部は、前記目標値が所定値以上であり、かつ、前記エンコーダの検出値が所定時間変化しない場合に、前記エンコーダから前記サーボドライバに前記エンコーダの検出値をフィードバックする経路に異常があることを検知する、
請求項1記載の搬送車。
【請求項3】
前記異常検知部は、前記エンコーダの今回の検出値が前記エンコーダの前回の検出値と差がない状態が所定時間以上継続する場合に、前記エンコーダの検出値が所定時間変化しないと判定する、
請求項2記載の搬送車。
【請求項4】
前記異常検知部は、前記エンコーダから前記サーボドライバに前記エンコーダの検出値をフィードバックする経路に異常があることを検知する際の条件に、前記モータに駆動電圧が供給されていることをさらに含める、
請求項2記載の搬送車。
【請求項5】
前記モータ及び前記エンコーダの組を複数有し、
前記異常検知部は、前記エンコーダから前記サーボドライバに前記エンコーダの検出値をフィードバックする経路に異常があることを、それぞれの前記組ごとに検知する、
請求項1記載の搬送車。
発明の詳細な説明
【技術分野】
【0001】
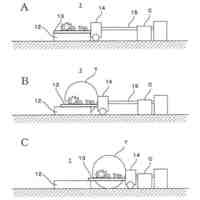
本発明は、自律走行可能な搬送車に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
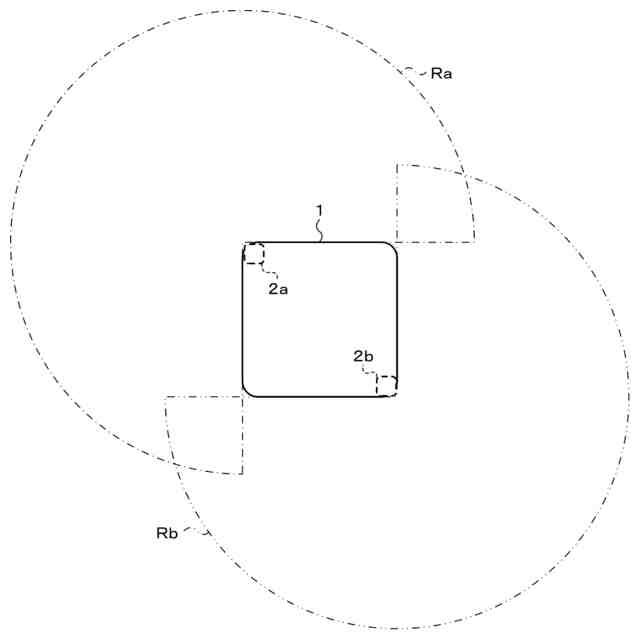
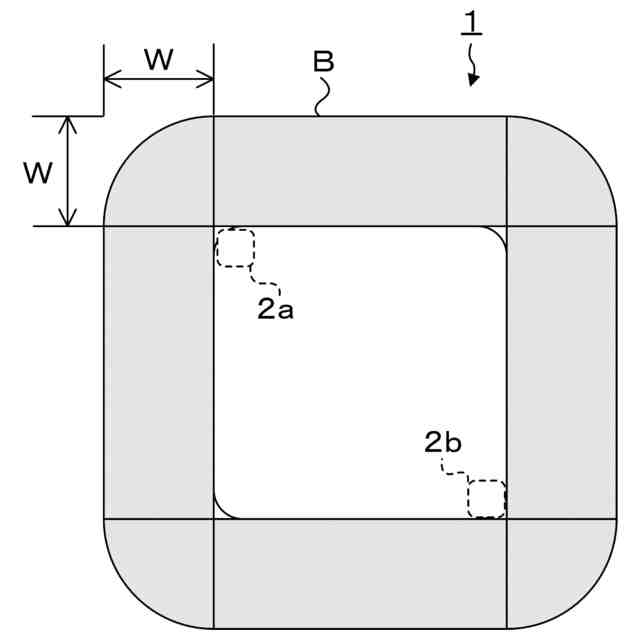
下記特許文献1には、製造現場などで資材などを搬送する無人搬送車(AGV:Automatic Guided Vehicle)が開示されている。この無人搬送車には、その先端に搭載されるレーザセンサによって進入体の有無を検知する監視領域が設けられている。この監視領域に物体が進入すると、無人搬送車が停止する。この監視領域は、車輪の車軸に設けられたエンコーダからの信号に基づいて算定される無人搬送車の速度及び加速度に応じて可変に設定されている。
【先行技術文献】
【特許文献】
【0003】
特許第6393523号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の無人搬送車は、車輪の車軸に設けられたエンコーダからの信号を処理するマイクロコンピュータを含む回路を、フェールセーフのために二重化している。そして、二重化した双方のマイクロコンピュータの処理結果を比較して、一致しない場合に、エンコーダの故障による異常を検知する。しかし、マイクロコンピュータを含む回路を二重化すると、回路構成が複雑になるうえ、コストが嵩む要因になる。
【0005】
そこで、本発明は、回路構成を複雑にせず、コストを抑えて異常を検知することができる搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様による搬送車は、車体の移動機構に含まれるモータに対する目標値に基づいて、モータに駆動電圧を供給するサーボドライバと、モータの動作状況を検出してサーボドライバにフィードバックするエンコーダと、目標値及びエンコーダの検出値に基づいて、エンコーダからサーボドライバにエンコーダの検出値をフィードバックする経路に異常があることを検知する異常検知部と、を備える。
【0007】
この態様によれば、従来のサーボシステムに含まれる回路構成で得られる、モータに対する目標値及びそのモータの動作状況を示すエンコーダの検出値、を用いて、エンコーダの検出値をフィードバックする経路に異常があることを簡易に検知することができる。
【0008】
上記態様において、異常検知部は、目標値が所定値以上であり、かつ、エンコーダの検出値が所定時間変化しない場合に、エンコーダからサーボドライバにエンコーダの検出値をフィードバックする経路に異常があることを検知してもよい。
【0009】
この態様によれば、モータに対して所定値以上の目標値を出力しているのに、エンコーダの検出値が変化しない場合に、エンコーダの検出値をフィードバックする経路に異常があると検知することができる。
【0010】
上記態様において、異常検知部は、エンコーダの今回の検出値がエンコーダの前回の検出値と差がない状態が所定時間以上継続する場合に、エンコーダの検出値が所定時間変化しないと判定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
給電装置
3日前
株式会社ダイヘン
溶接電源装置
2日前
株式会社ダイヘン
スポット接合装置
1日前
株式会社ダイヘン
DC電源装置、およびパルス発生装置
1日前
株式会社ダイヘン
固相接合装置および固相接合システム
3日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
22日前
個人
作業車両自動化システム
3日前
愛知製鋼株式会社
目標軌跡の設定方法
11日前
トヨタ自動車株式会社
生産管理システム
8日前
株式会社ダイフク
搬送設備
1日前
株式会社ダイフク
搬送設備
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
株式会社鷺宮製作所
制御装置
1か月前
トヨタ自動車株式会社
減圧弁
5日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
マーク ヘイリー
消防ロボット
15日前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
11日前
株式会社テイエルブイ
減圧弁の制御装置
17日前
アズビル株式会社
制御システムおよび制御方法
11日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
オムロン株式会社
安全装置
1か月前
三菱電機株式会社
電源回路
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
26日前
株式会社ダイフク
飛行体制御システム
1か月前
ミツミ電機株式会社
電源回路および駆動回路
11日前
国立大学法人東海国立大学機構
ミリング加工監視方法
24日前
株式会社日立製作所
製造工程管理システム
1か月前
株式会社FUJI
工作機械
1か月前
株式会社豊田自動織機
無人搬送車両
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ