TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089708
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204498
出願日
2023-12-04
発明の名称
無人搬送車両
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/245 20240101AFI20250609BHJP(制御;調整)
要約
【課題】車両自体でスリップを考慮した自動走行制御が可能な無人搬送車両を提供する。
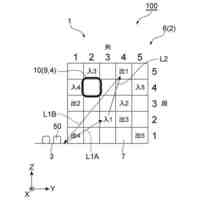
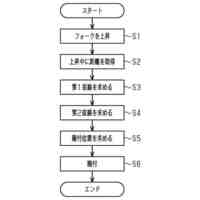
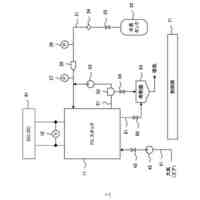
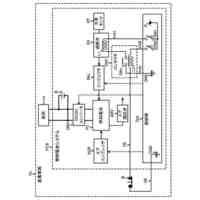
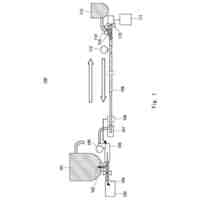
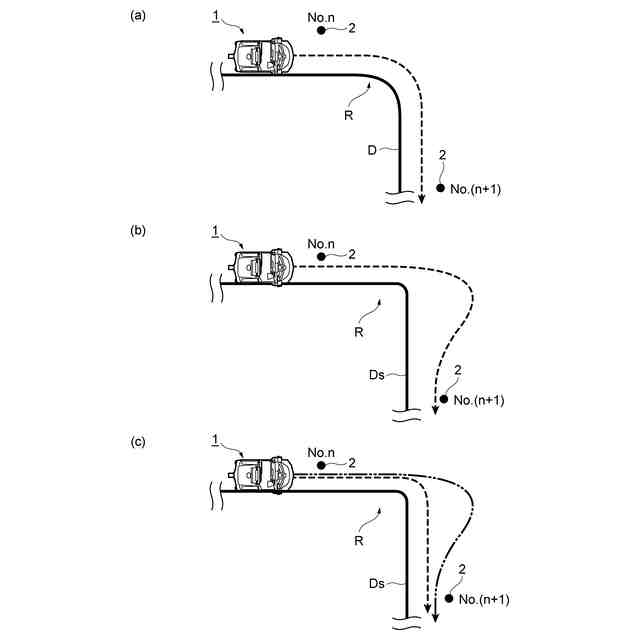
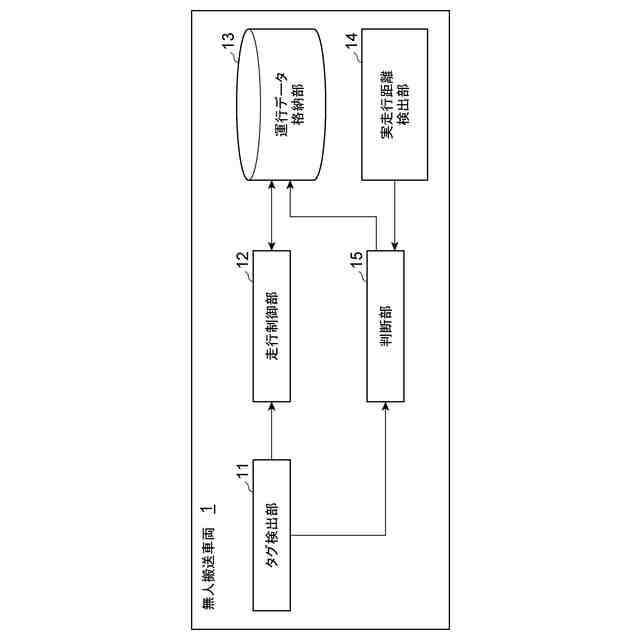
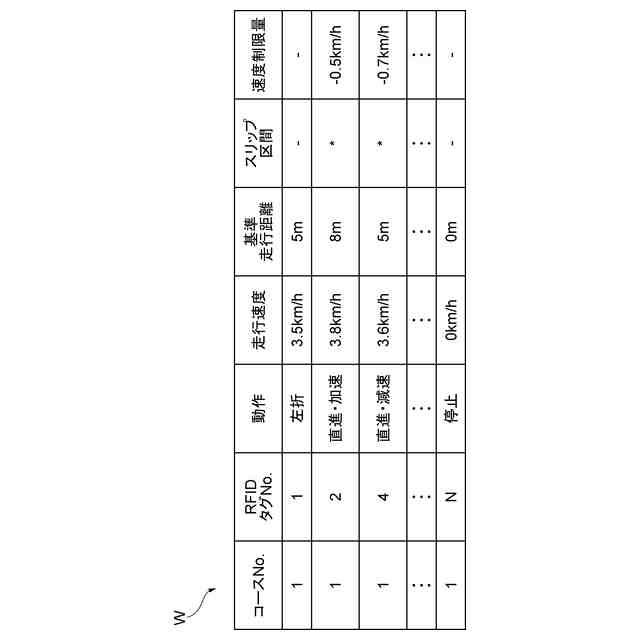
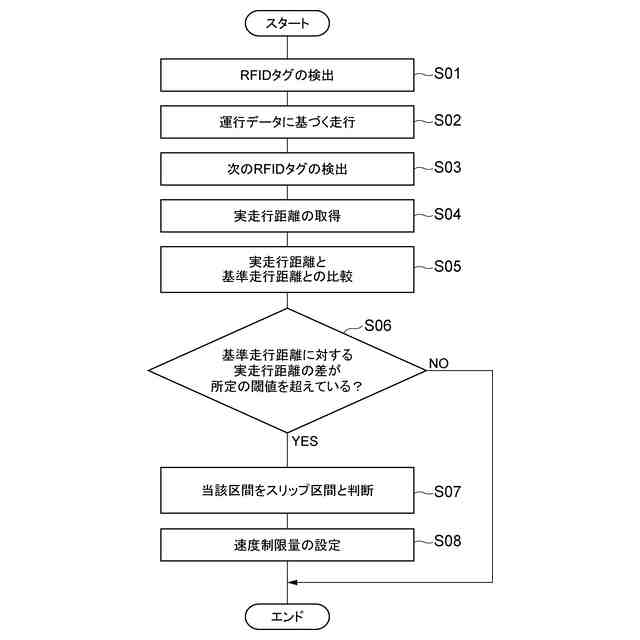
【解決手段】無人搬送車両1は、複数の区間Dで構成された所定の経路Rを自動で走行する無人搬送車両1であって、区間D毎の運行動作を示す運行データWに基づいて車両の走行を制御する走行制御部12と、走行制御部によって車両が路面を走行した実走行距離を検出する実走行距離検出部(検出部)14と、実走行距離と基準走行距離とを区間D毎に比較し、基準走行距離に対する実走行距離の差が所定の閾値を超えた区間Dをスリップ区間Dsと判断する判断部15と、を備え、走行制御部12は、スリップ区間Dsと判断された区間を走行する際に走行速度を制限する。
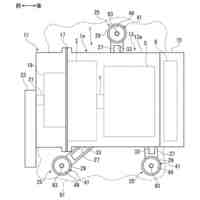
【選択図】図2
特許請求の範囲
【請求項1】
複数の区間で構成された所定の経路を自動で走行する無人搬送車両であって、
前記区間毎の運行動作を示す運行データに基づいて車両の走行を制御する走行制御部と、
前記走行制御部によって前記車両が路面を走行した実走行距離を検出する検出部と、
前記実走行距離と基準走行距離とを前記区間毎に比較し、前記基準走行距離に対する前記実走行距離の差が所定の閾値を超えた区間をスリップ区間と判断する判断部と、を備え、
前記走行制御部は、前記スリップ区間と判断された区間を走行する際に走行速度を制限する、無人搬送車両。
続きを表示(約 190 文字)
【請求項2】
前記走行制御部は、前記基準走行距離に対する前記実走行距離の差が大きいほど、前記スリップ区間と判断された区間を走行する際の速度制限量を大きくする、請求項1記載の無人搬送車両。
【請求項3】
前記判断部は、前記スリップ区間と判断した時点から所定の時間が経過した場合に、当該区間におけるスリップ区間の判断を解除する、請求項1又は2記載の無人搬送車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人搬送車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、荷物の搬送などに無人搬送車両が導入されている。無人搬送車両は、例えば予め設定された運行データに従い、荷物の積込位置と積下位置との間を自動で走行する。無人搬送車両の自動走行を制御する技術としては、例えば特許文献1に記載の無人車両の制御システムがある。この従来の無人車両の制御システムでは、路面状態データに基づいて無人車両が走行する際のスリップ量を予測し、予測したスリップ量に応じて無人車両の走行許可領域、或いは当該走行許可領域における停止点を設定する。
【先行技術文献】
【特許文献】
【0003】
特開2022-11448公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来の無人車両の制御システムでは、スリップ量の予測に用いる路面状態データとして、路面の水分に関するデータ、オペレータによって設定された地点の位置データ、散水車による散水量に関するデータ、カメラによる路面の撮像データなどが例示されている。しかしながら、これらのデータを用いる場合、データを取得するための上位のシステム・設備が必要となり、無人車両においても構成の複雑化や製造コスト増を招くおそれがある。
【0005】
本開示は、上記課題の解決のためになされたものであり、車両自体でスリップを考慮した自動走行制御が可能な無人搬送車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の要旨は、以下の[1]~[3]のとおりである。
【0007】
[1]複数の区間で構成された所定の経路を自動で走行する無人搬送車両であって、前記区間毎の運行動作を示す運行データに基づいて車両の走行を制御する走行制御部と、前記走行制御部によって前記車両が路面を走行した実走行距離を検出する検出部と、前記実走行距離と基準走行距離とを前記区間毎に比較し、前記基準走行距離に対する前記実走行距離の差が所定の閾値を超えた区間をスリップ区間と判断する判断部と、を備え、前記走行制御部は、前記スリップ区間と判断された区間を走行する際に走行速度を制限する、無人搬送車両。
【0008】
この無人搬送車両では、区間毎の実走行距離と基準走行距離との比較に基づいて、経路上の区間におけるスリップ区間の有無を判断する。スリップ区間と判断された区間については、走行速度の制限を行うことで、車両が経路から逸脱することを防止できる。この無人搬送車両では、実走行距離を検出する検出部を有しており、区間毎の基準走行距離を予め車両側で保有しておくことで、車両自体でスリップを考慮した自動走行制御が可能となる。スリップ区間の判断に必要なデータを車両自体で取得できるため、データを取得するための上位のシステム・設備が不要となり、構成の複雑化や製造コスト増を回避できる。
【0009】
[2]前記走行制御部は、前記基準走行距離に対する前記実走行距離の差が大きいほど、前記スリップ区間と判断された区間を走行する際の速度制限量を大きくする、[1]記載の無人搬送車両。このような制御により、スリップ区間を走行する際の車両の経路からの逸脱をより確実に防止できる。
【0010】
[3]前記判断部は、前記スリップ区間と判断した時点から所定の時間が経過した場合に、当該区間におけるスリップ区間の判断を解除する、[1]又は[2]記載の無人搬送車両。所定の時間が経過した後にスリップ区間の判断を解除することで、無人搬送車両の走行が必要以上に制限されることを抑制できる。また、スリップ区間の判断の解除にあたって、上位のシステム・設備からのデータの取得が不要であるため、構成の複雑化や製造コスト増を回避できる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
圧縮機
7日前
株式会社豊田自動織機
圧縮機
7日前
株式会社豊田自動織機
圧縮機
7日前
株式会社豊田自動織機
光源装置
1日前
株式会社豊田自動織機
内燃機関
3日前
株式会社豊田自動織機
電動圧縮機
23日前
株式会社豊田自動織機
電動圧縮機
22日前
株式会社豊田自動織機
電動圧縮機
今日
株式会社豊田自動織機
仕分け装置
22日前
株式会社豊田自動織機
電動圧縮機
6日前
株式会社豊田自動織機
遠心圧縮機
3日前
株式会社豊田自動織機
排気浄化装置
7日前
株式会社豊田自動織機
倉庫システム
23日前
株式会社豊田自動織機
フォークリフト
7日前
株式会社豊田自動織機
燃料電池用ポンプ
23日前
株式会社豊田自動織機
燃料電池システム
1日前
株式会社豊田自動織機
燃料電池モジュール
14日前
株式会社豊田自動織機
燃料電池モジュール
6日前
株式会社豊田自動織機
車両用スライドデッキ装置
23日前
株式会社豊田自動織機
フォークリフトの荷役制御装置
今日
株式会社豊田自動織機
燃料電池システム及び産業車両
15日前
株式会社豊田自動織機
フォークリフトの荷役制御装置
9日前
株式会社豊田自動織機
フォークリフトの荷役制御装置
9日前
株式会社豊田自動織機
燃料電池ユニット及び産業車両
6日前
株式会社豊田自動織機
制御装置、及びパレットロック装置
22日前
トヨタ自動車株式会社
配管洗浄装置
8日前
株式会社豊田中央研究所
内燃機関の気筒内ガス温度の算出方法
21日前
トヨタ自動車株式会社
ワーク持ち上げ装置及びワーク持ち上げ方法
7日前
株式会社豊田中央研究所
制御装置及び制御システム
9日前
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
13日前
愛知製鋼株式会社
目標軌跡の設定方法
2日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送設備
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ