TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107891
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001431
出願日
2024-01-09
発明の名称
制御装置及び制御システム
出願人
株式会社豊田中央研究所
,
トヨタ自動車株式会社
,
株式会社デンソー
,
株式会社豊田自動織機
,
株式会社アイシン
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
19/06 20060101AFI20250714BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】発振信号を出力する信号源の近接を検出する場合において、複数の発振信号によって発生するビートの影響を抑制する。
【解決手段】制御システムは、発振信号を出力する少なくとも1つ信号源と、信号源の近接を検出した場合に制御対象に対して所定の制御を行う少なくとも1つの制御装置と、を含む。信号源の少なくとも1つは、他の信号源との周波数差が経時的に変化するように当該信号源から出力される発振信号の発振周波数を経時的に変化させる。
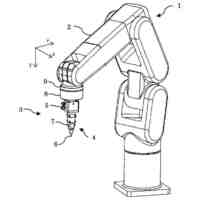
【選択図】図1
特許請求の範囲
【請求項1】
発振信号を出力する少なくとも1つの信号源と、
前記信号源の近接を検出した場合に制御対象に対して所定の制御を行う少なくとも1つの制御装置と、
を含み、
前記信号源の少なくとも1つは、他の信号源との周波数差が経時的に変化するように当該信号源から出力される発振信号の発振周波数を経時的に変化させる
制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記信号源の少なくとも1つは、当該信号源から出力される発振信号の発振周波数を規則的又はランダムに変化させる
請求項1に記載の制御システム。
【請求項3】
前記信号源の少なくとも1つは、当該信号源から出力される発振信号の発振周波数を周波数ホッピング又は周波数スイープにより変化させる
請求項1に記載の制御システム。
【請求項4】
前記制御装置は、
入力される前記発振信号を処理し、前記信号源との距離に応じた検出信号を出力する検出器と、
前記検出信号が前記信号源の近接を示す場合、制御対象に対して所定の制御を行う制御器と、
を有する請求項1から請求項3のいずれか1項に記載の制御システム。
【請求項5】
前記検出器は、
前記発振信号の包絡線を抽出する抽出器と、
抽出された包絡線に含まれる高周波成分を除去するローパスフィルタと、
を含む
請求項4に記載の制御システム。
【請求項6】
前記信号源の少なくとも1つは、他の信号源との周波数差が前記ローパスフィルタのカットオフ周波数よりも高くなる期間の割合が一定以上となるように、当該信号源から出力される発振信号の発振周波数を経時的に変化させる
請求項5に記載の制御システム。
【請求項7】
前記信号源の少なくとも1つは、前記ローパスフィルタのカットオフ周波数の逆数の3分の1以下の間隔で当該信号源から出力される発振信号の発振周波数を変化させる
請求項5に記載の制御システム。
【請求項8】
前記検出器は、第1の電極によって受信された前記発振信号と、前記第1の電極とは異なる第2の電極によって受信された前記発振信号との位相差に応じた信号を前記検出信号として出力する
請求項4に記載の制御システム。
【請求項9】
前記制御器は、前記検出信号が前記信号源の近接を示す場合、前記制御対象であるロボットの可動部の動きを減速若しくは停止させ、又は前記可動部の移動方向を転換させる
請求項4に記載の制御システム。
【請求項10】
前記制御器は、前記検出信号が前記信号源の近接を示す場合、警報を発出させる制御を行う
請求項4に記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の技術は、制御装置及び制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ロボットの対人保護に関する技術として、以下の技術が知られている。例えば特許文献1には、ロボットとそのロボットの周囲で作業する作業者とが接近したときに、ロボットに作業者との接触を回避するための動作をさせるロボットの対人保護装置が記載されている。この対人保護装置は、作業者の上衣に装着され、その作業者の体表面近傍に人体の有する静電界よりも大きな絶対値の正負に変動する交流電界を付与するウェアラブル装置と、ロボットに設けられる検知電極と、検知電極における電圧を計測する計測器とを備える。ウェアラブル装置は、交流電圧付加装置と、その交流電圧付加装置に接続される電極とで作業者に交流電圧を付加する。計測器で計測した電圧値に基づいてロボットの制御器へ信号が送られ、ロボットの動作が制御される。
【先行技術文献】
【特許文献】
【0003】
特開2021-109288号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
マニピュレータ等の可動部を有する産業用ロボットには、可動部が作業者と接触することを回避するための安全装置が設けられている。例えば、特開2021-109288号公報に記載の対人保護装置においては、作業者の体表面近傍に交流電界が付与されている状態で、ロボットと作業者とが接近することによりロボット側の電極の電圧が高くなると、計測器が計測した電圧値に応じた対人保護のための制御信号が制御器に送られる。制御器は、制御信号に基づいてロボットを減速させたり、停止させたりする。
【0005】
しかしながら、上記の装置によれば、複数の作業者の各々に付与される交流電界によって発生するビートが問題となる。交流電界を発生させる発振器は、水晶発振子、セラミック発振子又はシリコン発振子を備え、安定した発振周波数の発振信号を出力する。発振周波数が例えば30MHzである場合、その公差は数Hz又は数十Hzといった程度である。交流電界の受信側では、例えば2人の作業者の各々に装着された2つの発振器からの発振信号が合成された信号が受信されるが、2つの発振信号の周波数差が数Hz程度である場合、周波数差に応じた数Hz程度のビートが発生する。ビートの周波数が、作業者の近接を検出する際の周波数帯域に含まれている場合、ビートがノイズとなり、作業者の近接を適切に検出することが困難となる。
【0006】
開示の技術は、上記した点に鑑みてなされたものであり、発振信号を出力する信号源の近接を検出する場合において、複数の発振信号によって発生するビートの影響を抑制することを目的とする。
【課題を解決するための手段】
【0007】
開示の技術に係る制御システムは、発振信号を出力する少なくとも1つの信号源と、前記信号源の近接を検出した場合に制御対象に対して所定の制御を行う少なくとも1つの制御装置と、を含む。前記信号源の少なくとも1つは、他の信号源との周波数差が経時的に変化するように当該信号源から出力される発振信号の発振周波数を経時的に変化させる。
【0008】
前記信号源の少なくとも1つは、当該信号源から出力される発振信号の発振周波数を規則的又はランダムに変化させてもよい。前記信号源の少なくとも1つは、当該信号源から出力される発振信号の発振周波数を周波数ホッピング又は周波数スイープにより変化させてもよい。
【0009】
前記制御装置は、入力される前記発振信号を処理し、前記信号源との距離に応じた検出信号を出力する検出器と、前記検出信号が前記信号源の近接を示す場合、制御対象に対して所定の制御を行う制御器と、を有していてもよい。
【0010】
前記検出器は、前記発振信号の包絡線を抽出する抽出器と、抽出された包絡線に含まれる高周波成分を除去するローパスフィルタと、を含んでいてもよい。前記信号源の少なくとも1つは、他の信号源との周波数差が前記ローパスフィルタのカットオフ周波数よりも高くなる期間の割合が一定以上となるように、当該信号源から出力される発振信号の発振周波数を経時的に変化させることが好ましい。前記信号源の少なくとも1つは、前記ローパスフィルタのカットオフ周波数の逆数の3分の1以下の間隔で当該信号源から出力される発振信号の発振周波数を変化させることが好ましい。前記検出器は、第1の電極によって受信された前記発振信号と、前記第1の電極とは異なる第2の電極によって受信された前記発振信号との位相差に応じた信号を前記検出信号として出力してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社竹中工務店
補助セット
2か月前
CKD株式会社
把持装置
4日前
株式会社不二越
ロボット
2か月前
トヨタ自動車株式会社
学習装置
19日前
川崎重工業株式会社
ハンド
2か月前
ダイセイ株式会社
ロボット自動刻印装置
4日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
ロボット
2か月前
瓜生製作株式会社
電動締付工具
12日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
2か月前
トヨタ自動車株式会社
軌道生成装置
2か月前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社不二越
垂直多関節ロボット
19日前
株式会社マキタ
集塵アタッチメント
11日前
トヨタ自動車株式会社
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
2か月前
アネックスツール株式会社
ドライバービット
2か月前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
ワールド技研株式会社
ロボットセル装置
2か月前
株式会社マキタ
回転打撃工具
2か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
セイコーエプソン株式会社
ロボット
2か月前
山九株式会社
レンチ保持治具
2か月前
トヨタ自動車株式会社
ロボットの制御装置
2か月前
NTN株式会社
ハンド
2か月前
株式会社マキタ
電動工具
19日前
NTN株式会社
作業装置
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
作業機
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ