TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025105178
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223543
出願日
2023-12-28
発明の名称
ロボットシステム及びロボットシステムの制御方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B25J
19/06 20060101AFI20250703BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットのセンサに異常が生じた場合にロボットの動作の継続を可能にするロボットシステム等を提供する。
【解決手段】本開示の一態様に係るロボットシステムは、センサを備えるロボットと、前記ロボット及び周辺環境を再現する仮想空間モデルを記憶する第1記憶器と、前記仮想空間モデルの状態を変化させる第1処理回路と、前記センサの検出結果を用いつつ前記ロボットを制御する第2処理回路と、前記センサの検出結果をセンサ情報として収集し蓄積する第3処理回路と、前記センサの異常を検出する第4処理回路とを備え、前記第1処理回路は、異常が検出された場合に、前記センサ情報を前記仮想空間モデルに適用することで、前記ロボットの動作環境を前記仮想空間モデルに再現し、前記第2処理回路は、動作環境が再現された前記仮想空間モデルから取得する情報を用いつつ、前記ロボットに継続して動作させる。
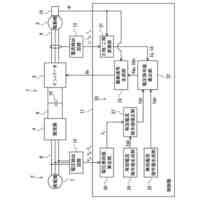
【選択図】図4
特許請求の範囲
【請求項1】
センサを備えるロボットと、
前記ロボット及び前記ロボットの周辺環境を再現する仮想的なロボットモデル及び仮想的な周辺環境モデルを含む仮想空間モデルを記憶する第1記憶器と、
前記仮想空間モデルの状態を変化させる第1処理回路と、
前記センサの検出結果を用いつつ動作プログラムに従って前記ロボットを制御する第2処理回路と、
前記ロボットが前記動作プログラムに従って動作する過程において、前記センサの検出結果をセンサ情報として収集し蓄積する第3処理回路と、
前記センサを監視し、前記センサから送られる信号の異常を検出する第4処理回路とを備え、
前記第1処理回路は、前記第4処理回路によって異常が検出された場合に、前記第3処理回路によって蓄積された前記センサ情報を前記仮想空間モデルに適用することで、前記ロボットの動作環境を前記仮想空間モデルに再現し、
前記第2処理回路は、前記ロボットの動作環境が再現された前記仮想空間モデルから取得する情報を用いつつ、前記ロボットに継続して動作させる
ロボットシステム。
続きを表示(約 1,300 文字)
【請求項2】
前記第2処理回路は、前記ロボットの動作環境が再現された前記仮想空間モデルに含まれる前記センサに対応する仮想的なセンサの検出結果を用いつつ、前記ロボットに継続して動作させる
請求項1に記載のロボットシステム。
【請求項3】
前記第2処理回路は、前記ロボットの動作環境が再現された前記仮想空間モデルから取得する情報を用いつつ、前記動作プログラムにおける所定の進捗段階に至るまで前記動作プログラムに従って前記ロボットに継続して動作させる
請求項1に記載のロボットシステム。
【請求項4】
前記第2処理回路は、前記ロボットの動作環境が再現された前記仮想空間モデルに含まれる前記センサに対応する仮想的なセンサの検出結果と、前記異常が検出された時点の状態を示す前記仮想空間モデルとを用いつつ、前記ロボットに継続して動作させる
請求項1に記載のロボットシステム。
【請求項5】
前記第1処理回路は、前記ロボットの動作環境が再現された前記仮想空間モデルに前記動作プログラムを適用することで、当該仮想空間モデル内の前記仮想的なロボットモデルに以降の動作をシミュレーションさせ、
前記第2処理回路は、前記ロボットの動作が前記仮想的なロボットモデルの動作に追従するように前記ロボットに継続して動作させる
請求項1に記載のロボットシステム。
【請求項6】
前記第1処理回路と前記第3処理回路と前記第1記憶器とを備えるサーバと、
前記第2処理回路を備え、前記サーバと通信ネットワークを介して通信可能に接続される処理端末とを備え、
前記第4処理回路は、前記サーバ又は前記処理端末に備えられ、
前記サーバは、複数のタスクに対応した複数の前記動作プログラムを記憶する第2記憶器を備え、
前記サーバは、要求されるタスクに応じた前記動作プログラムを、前記処理端末に送信し、
前記処理端末は、受信した前記動作プログラムを使用して、前記ロボットに前記要求されるタスクを自律的に実行させる
請求項1に記載のロボットシステム。
【請求項7】
動作プログラムに従ってロボットに動作させることと、
前記ロボットが前記動作プログラムに従って動作する過程において、前記ロボットが備えるセンサの検出結果をセンサ情報として収集し蓄積することと、
前記ロボット及び前記ロボットの周辺環境を再現する仮想的なロボットモデル及び仮想的な周辺環境モデルを含む仮想空間モデルを生成することと、
前記センサから送られる信号の異常を検出することと、
前記センサから送られる信号の異常が検出された場合に、前記仮想空間モデルに前記センサ情報を適用することで、前記ロボットの動作環境を前記仮想空間モデルに再現することと、
前記ロボットの動作環境が再現された前記仮想空間モデルから取得する情報を用いつつ、前記ロボットに継続して動作させることとを含む
ロボットシステムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム及びロボットシステムの制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、自律移動装置を開示する。自律移動装置の制御装置は、センサにより取得される周囲の環境情報と地図情報とに基づき、自律移動装置の移動手段を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2016-24598号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1において、センサに異常が発生すると、自律移動装置の自律的な移動が困難になる。
【0005】
本開示は、ロボットのセンサに異常が生じた場合にロボットの動作の継続を可能にするロボットシステム及びロボットシステムの制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るロボットシステムは、センサを備えるロボットと、前記ロボット及び前記ロボットの周辺環境を再現する仮想的なロボットモデル及び仮想的な周辺環境モデルを含む仮想空間モデルを記憶する第1記憶器と、前記仮想空間モデルの状態を変化させる第1処理回路と、前記センサの検出結果を用いつつ動作プログラムに従って前記ロボットを制御する第2処理回路と、前記ロボットが前記動作プログラムに従って動作する過程において、前記センサの検出結果をセンサ情報として収集し蓄積する第3処理回路と、前記センサを監視し、前記センサから送られる信号の異常を検出する第4処理回路とを備え、前記第1処理回路は、前記第4処理回路によって異常が検出された場合に、前記第3処理回路によって蓄積された前記センサ情報を前記仮想空間モデルに適用することで、前記ロボットの動作環境を前記仮想空間モデルに再現し、前記第2処理回路は、前記ロボットの動作環境が再現された前記仮想空間モデルから取得する情報を用いつつ、前記ロボットに継続して動作させる。
【図面の簡単な説明】
【0007】
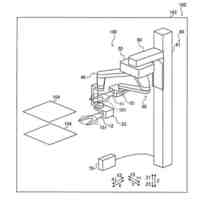
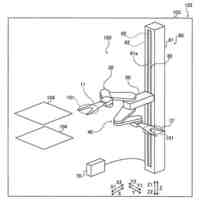
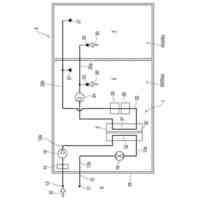
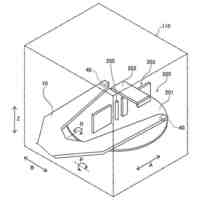
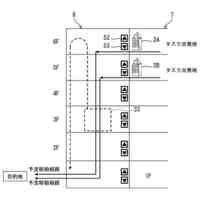
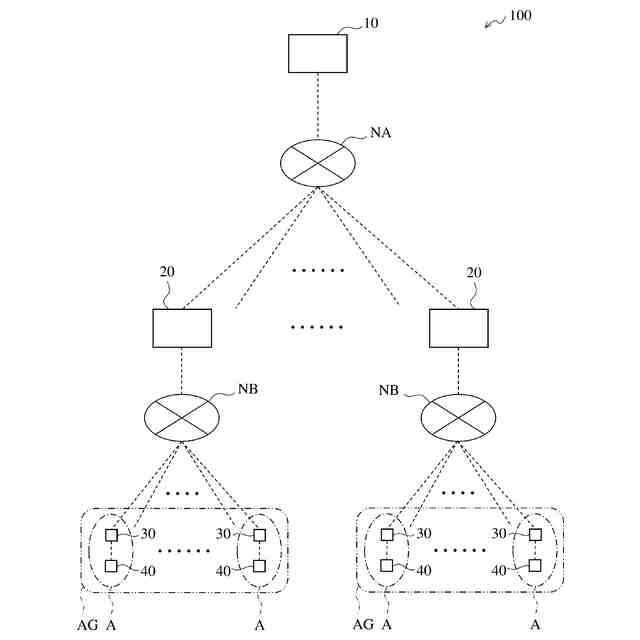
図1は、例示的な実施の形態に係るロボットシステムの一例を示す図である。
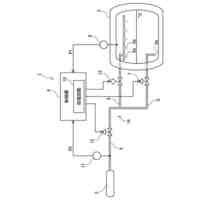
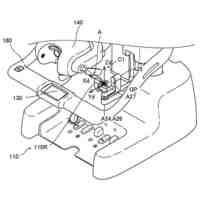
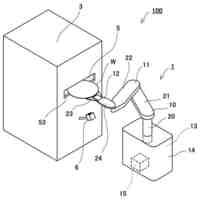
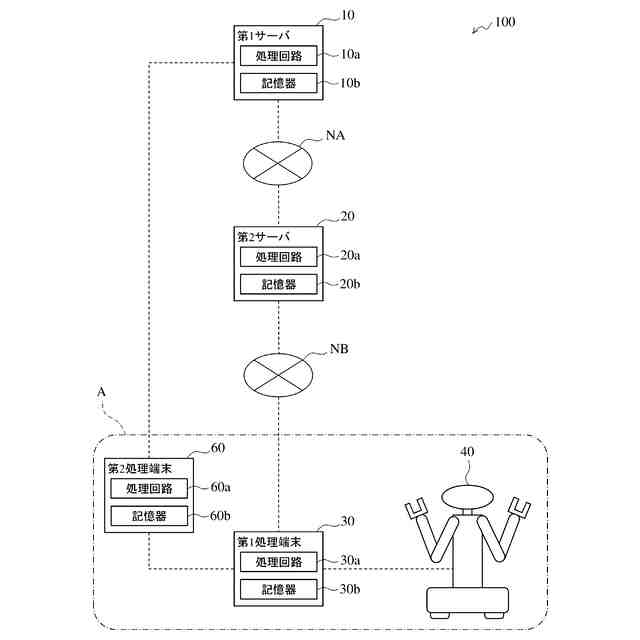
図2は、図1のロボットシステムにおいて、1つの第2サーバ、1つの第1処理端末、1つのロボット及び1つの第2処理端末を抽出して示す図である。
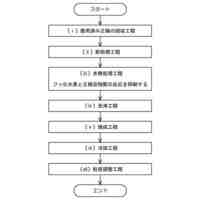
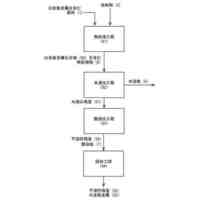
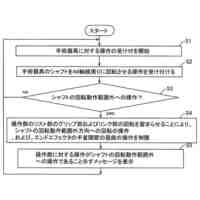
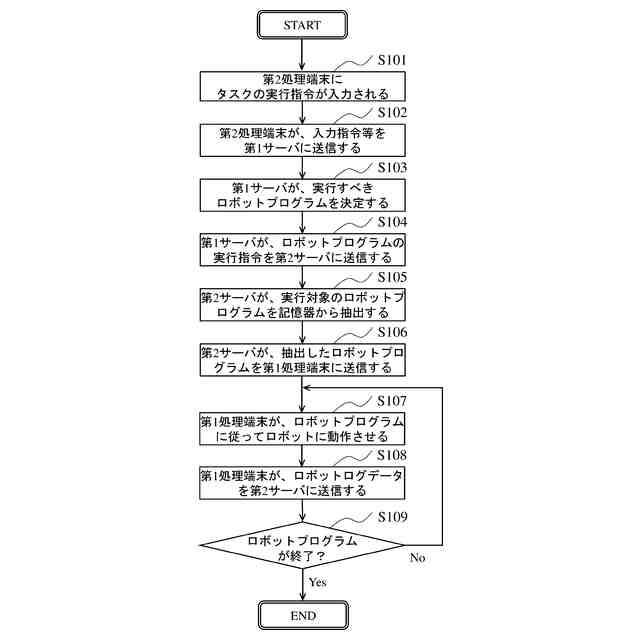
図3は、実施の形態に係るロボットシステムの動作の一例を示すフローチャートである。
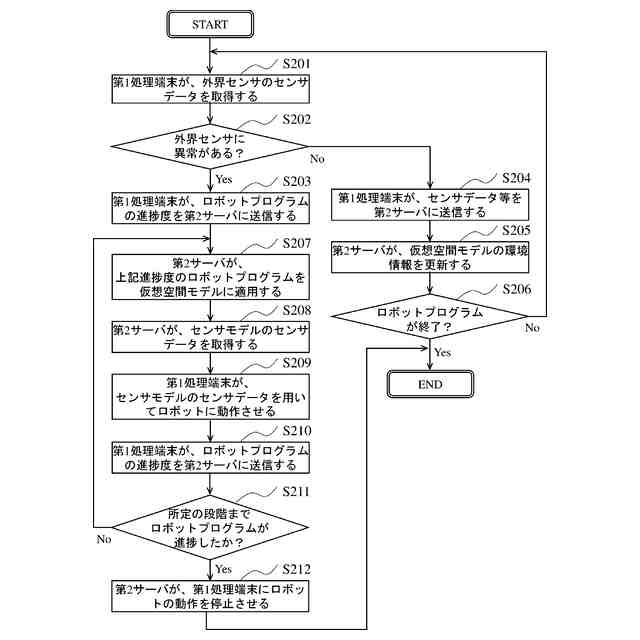
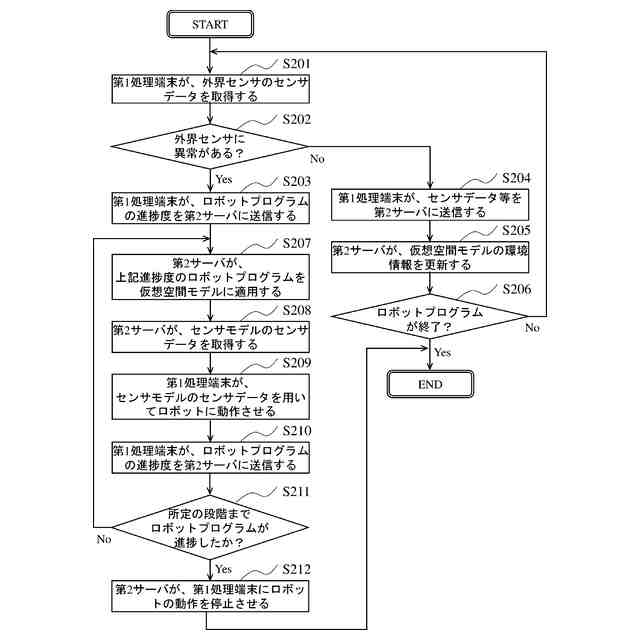
図4は、センサに異常が生じた場合の実施の形態に係るロボットシステムの動作の一例を示すフローチャートである。
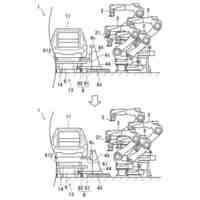
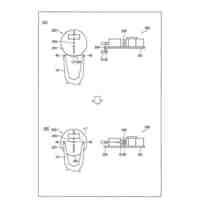
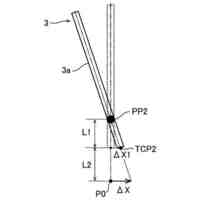
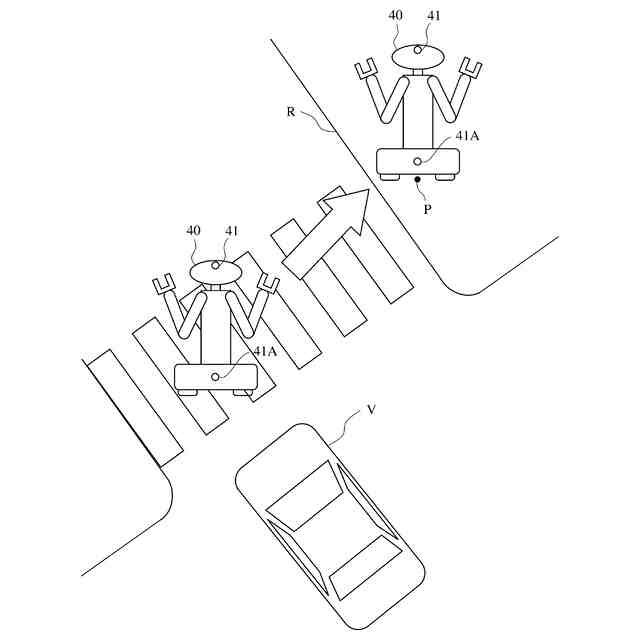
図5は、センサに異常が発生した場合のロボットの動作の一例を示す図である。
【発明を実施するための形態】
【0008】
以下において、本開示の例示的な実施の形態を、図面を参照しつつ説明する。以下で説明する実施の形態は、いずれも包括的又は具体的な例を示すものである。以下の実施の形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。添付の図面における各図は、模式的な図であり、必ずしも厳密に図示されたものでない。各図において、実質的に同一の構成要素に対しては同一の符号を付しており、重複する説明は省略又は簡略化される場合がある。本明細書及び請求項では、「装置」とは、1つの装置を意味し得るだけでなく、複数の装置を含むシステムも意味し得る。以下では動作プログラムに基づいて動作する機械装置としてロボットを例示する。
【0009】
図1及び図2を参照して、例示的な実施の形態に係るロボットシステム100を説明する。図1は、例示的な実施の形態に係るロボットシステム100の一例を示す図である。図2は、図1のロボットシステム100において、1つの第2サーバ20、1つの第1処理端末30、1つのロボット40及び1つの第2処理端末60を抽出して示す図である。ロボットシステム100は、第1サーバ10と、第2サーバ20と、第1処理端末30と、ロボット40とを含む。第1サーバ10は、第1通信ネットワークNAを介して第2サーバ20と通信可能に接続される。第1サーバ10は、第1通信ネットワークNAを介して第1処理端末30と通信可能に接続されてもよい。第2サーバ20は、第1通信ネットワークNAを介して第1処理端末30と通信可能に接続される。
【0010】
複数のロボット稼働エリアAが存在し、複数のロボット稼働エリアAのそれぞれに、1つ以上の第1処理端末30と、1つ以上のロボット40とが配置される。ロボット稼働エリアAは、1つ以上のロボット40がサービスの提供又は作業を行うエリアである。ロボット稼働エリアAの例は、建物又施設内に設定されるエリア、及び、地図に基づき設定されるエリアなどを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
10日前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
排ガス採取器
14日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
位置情報システム
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
基板搬送ロボット
2日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
クローズドインペラ
2日前
川崎重工業株式会社
正極活物質の再生方法
3日前
川崎重工業株式会社
液化ガス導入システム
10日前
川崎重工業株式会社
電池セル及びその分解方法
24日前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
2日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
1か月前
川崎重工業株式会社
電力供給システムおよびその制御方法
9日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
9日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
2日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
1日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
6日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
20日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
今日
川崎重工業株式会社
多重殻タンク
20日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
15日前
川崎重工業株式会社
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
1か月前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
14日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ