TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025113617
公報種別
公開特許公報(A)
公開日
2025-08-04
出願番号
2024007867
出願日
2024-01-23
発明の名称
保持システム
出願人
コネクテッドロボティクス株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250728BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
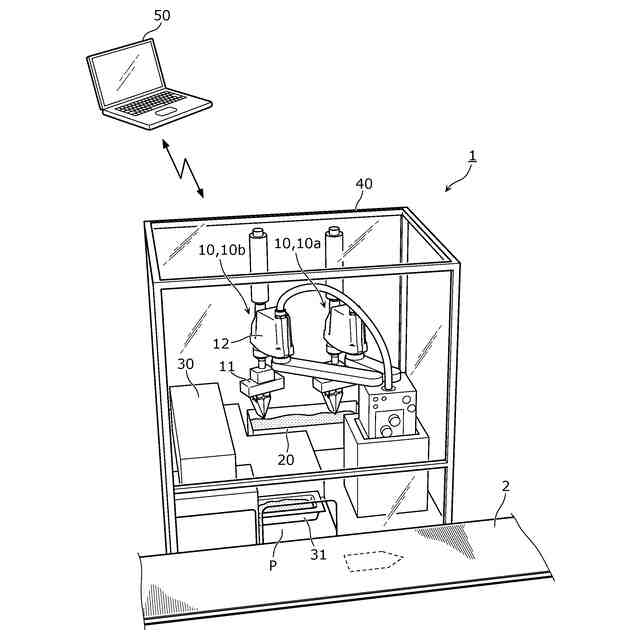
【課題】カメラを用いなくとも対象物までの距離を測定可能とするとともに、対象物を保持する際の動作時間を短縮可能な保持システムを提供する。
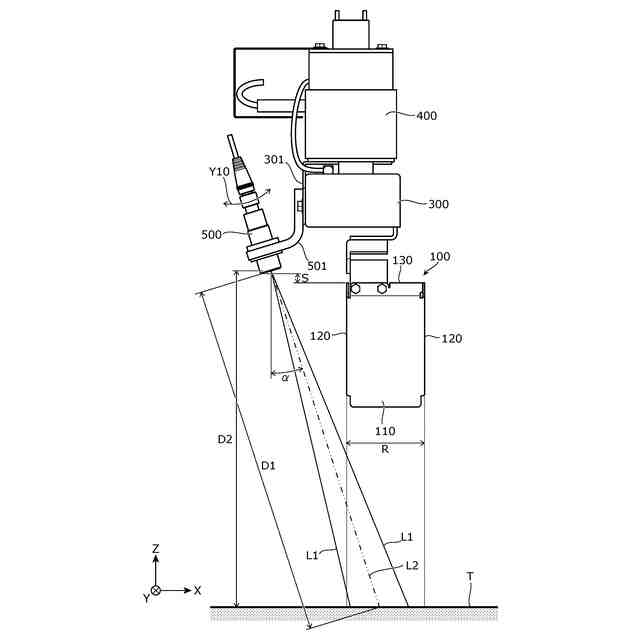
【解決手段】保持システム1は、対象物Tを保持する保持部(ハンド11)を有するロボット10と、対象物Tまでの距離を測定するための測距部500と、測距部500の測定結果に基づいて、ロボット10の動作を制御する制御部とを備えている。測距部500は、対象物Tに向けて波動を発し、当該対象物Tを反射した波動を受け取ることで距離を測定する。
【選択図】図3
特許請求の範囲
【請求項1】
対象物を保持する保持部を有するロボットと、
前記対象物までの距離を測定するための測距部と、
前記測距部の測定結果に基づいて、前記ロボットの動作を制御する制御部とを備え、
前記測距部は、前記対象物に向けて波動を発し、当該対象物を反射した前記波動を受け取ることで前記距離を測定する、
保持システム。
続きを表示(約 440 文字)
【請求項2】
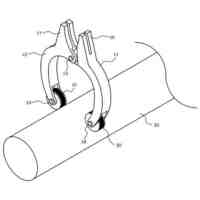
前記保持部は、前記対象物を把持する2つの把持部材を備え、
前記測距部は、前記保持部の側方に配置されている、
請求項1に記載の保持システム。
【請求項3】
前記測距部は、閉じた状態の前記2つの把持部材の下方に向けて前記波動を発する、
請求項2に記載の保持システム。
【請求項4】
前記測距部は、前記2つの把持部材の上端よりも上方に配置されている、
請求項2に記載の保持システム。
【請求項5】
前記測距部は、前記波動として超音波を発する、
請求項1~4のいずれか一項に記載の保持システム。
【請求項6】
前記対象物は、食材である、
請求項5に記載の保持システム。
【請求項7】
前記対象物が光沢物である、
請求項6に記載の保持システム。
【請求項8】
前記対象物は暗色である、
請求項6に記載の保持システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、保持システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、ロボットアームから対象物までの距離を、カメラを用いて計測するシステムが知られている(例えば特許文献1参照)。また、対象物を保持するための保持部を、対象物表面に接触させ、その反力により対象物までの距離を測定するシステムも知られている。
【先行技術文献】
【特許文献】
【0003】
特許第6792230号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、カメラを採用したシステムの場合、カメラの導入コスト、管理コストが必要となる。一方、対象物の表面に保持部を接触させ、その反力により対象物までの距離を測定する場合には、測定動作及び測定時間が必要であるため、対象物を保持する際の動作時間が長くなってしまうおそれがある。
【0005】
本発明は、カメラを用いなくとも対象物までの距離を測定可能とするとともに、対象物を保持する際の動作時間を短縮可能な保持システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る保持システムは、対象物を保持する保持部を有するロボットと、前記対象物までの距離を測定するための測距部と、前記測距部の測定結果に基づいて、前記ロボットの動作を制御する制御部とを備え、前記測距部は、前記対象物に向けて波動を発し、当該対象物を反射した前記波動を受け取ることで前記距離を測定する。
【発明の効果】
【0007】
本発明における保持システムによれば、カメラを用いなくとも対象物までの距離を測定可能とするとともに、対象物を保持する際の動作時間を短縮できる。
【図面の簡単な説明】
【0008】
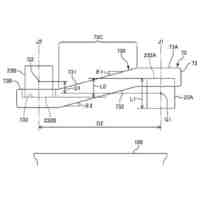
実施の形態に係る保持システムの外観を示す斜視図である。
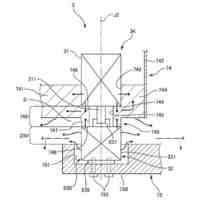
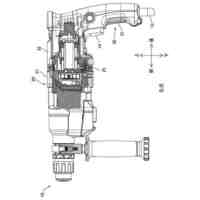
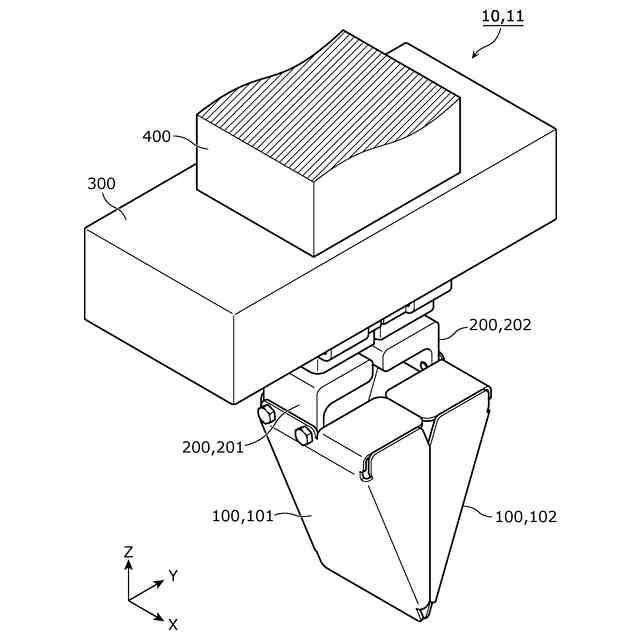
実施の形態に係るロボットのハンドの構成を示す斜視図である。
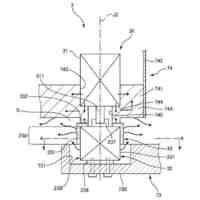
実施の形態に係るロボットのハンドの構成を示す平面図である。
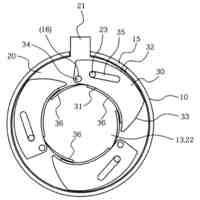
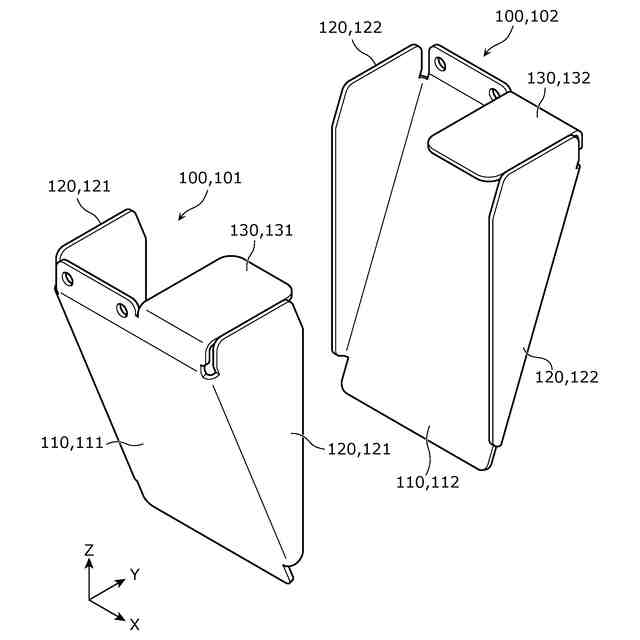
実施の形態に係るロボットのハンドが有する把持部材の構成を示す斜視図である。
実施の形態に係るロボットのハンドが有する把持部材の開閉動作を示す正面図である。
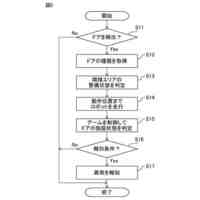
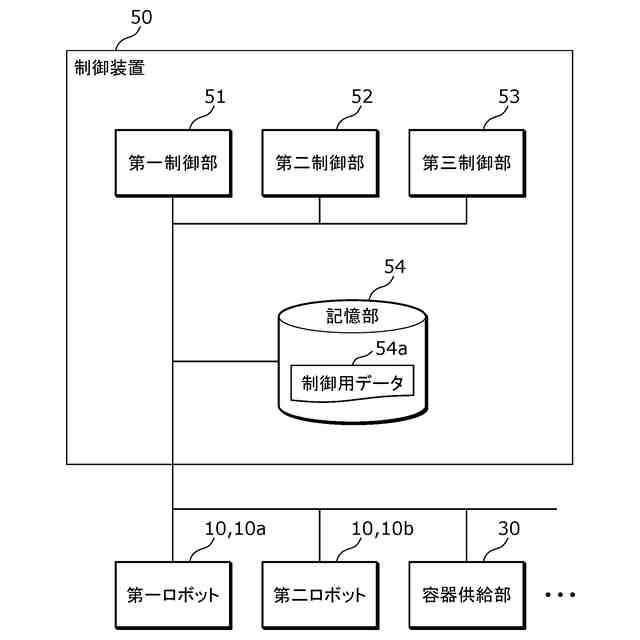
実施の形態に係る制御装置の機能的な構成を示すブロック図である。
【発明を実施するための形態】
【0009】
本発明の一態様に係る保持システムは、対象物を保持する保持部を有するロボットと、前記対象物までの距離を測定するための測距部と、前記測距部の測定結果に基づいて、前記ロボットの動作を制御する制御部とを備え、前記測距部は、前記対象物に向けて波動を発し、当該対象物を反射した前記波動を受け取ることで前記距離を測定する。
【0010】
これによれば、測距部が波動を発することで対象物までの距離を測定しているので、カメラを用いなくとも対象物までの距離を測定できる。さらに、測距部は、波動を発することで対象物までの距離を測定しているので、保持部を対象物に接触させて距離を測定する場合と比較しても、測定動作及び測定時間を抑制できる。これにより、対象物を保持する際の動作時間を短縮できる。このように、本開示の保持システムは、カメラを用いなくとも対象物までの距離を測定できるとともに、対象物を保持する際の動作時間を短縮できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
13日前
株式会社三協システム
製函機
11日前
CKD株式会社
把持装置
12日前
株式会社三協システム
移載装置
10日前
株式会社不二越
ロボットシステム
24日前
株式会社不二越
ロボット操作装置
18日前
株式会社ミクロブ
把持装置
12日前
日本精工株式会社
締結用工具
27日前
SMC株式会社
着脱装置
11日前
太陽パーツ株式会社
アシストスーツ
13日前
ARMA株式会社
ジョイントフレーム
25日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
エッジ仕上げ装置
2日前
株式会社不二越
ロボットシステム
13日前
株式会社不二越
ロボットシステム
10日前
株式会社不二越
垂直多関節ロボット
3日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
16日前
ダイハツ工業株式会社
移載治具
25日前
大和ハウス工業株式会社
ねじ回転工具
11日前
株式会社不二越
協働ロボットシステム
1か月前
ライオン株式会社
移載システム
4日前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
1か月前
セイコーエプソン株式会社
ロボット
20日前
セイコーエプソン株式会社
ロボット
11日前
コネクテッドロボティクス株式会社
保持システム
1か月前
セイコーエプソン株式会社
ロボット
24日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2日前
セイコーエプソン株式会社
ロボット
1か月前
シヤチハタ株式会社
マーキング装置
16日前
シヤチハタ株式会社
マーキング装置
16日前
セコム株式会社
ロボット
24日前
株式会社マキタ
打撃工具
1か月前
広島県
把持固定機構、及び把持固定ロボットハンド
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ