TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126036
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024022398
出願日
2024-02-16
発明の名称
ロボット
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250821BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多数のドアを有する施設においても適切に警備動作を実行できるロボットを提供する。
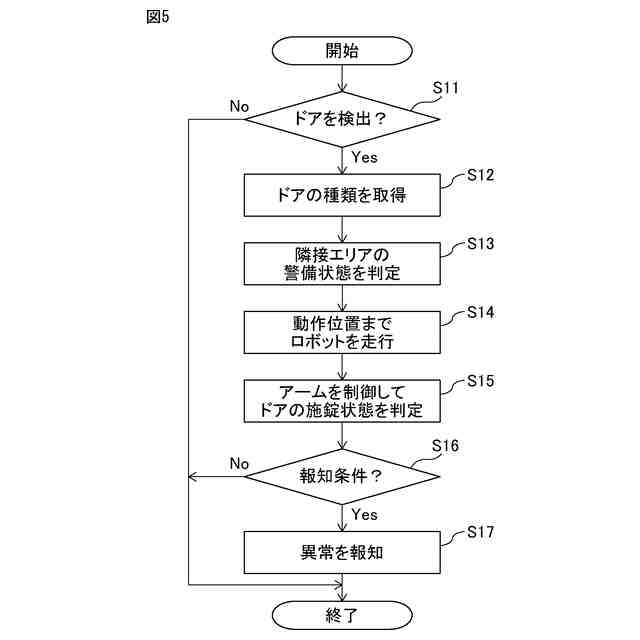
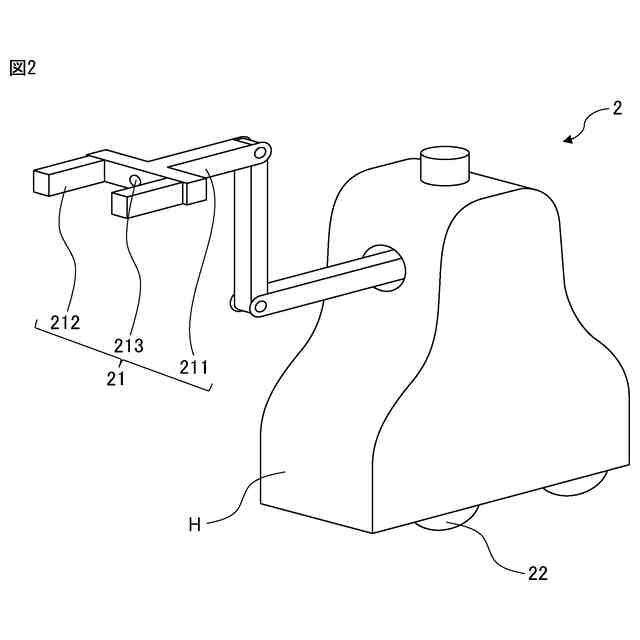
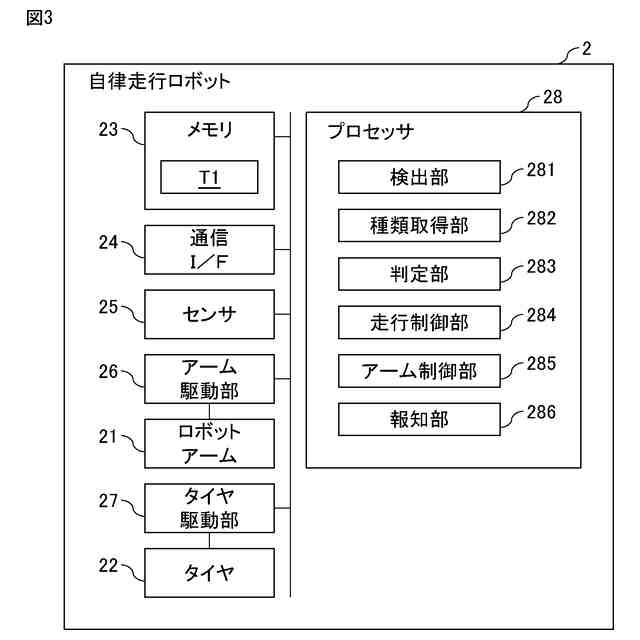
【解決手段】ロボットは、ロボットアームと、警備動作の対象となるドアの種類を示す情報を取得する種別取得部と、ドアの種類に基づいてロボットアームを制御して、ドアの状態を判定または変更するアーム制御部と、を有する。
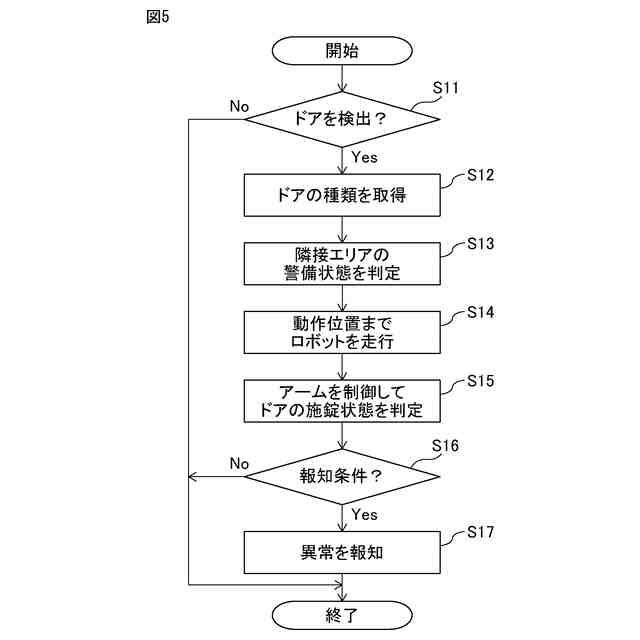
【選択図】図5
特許請求の範囲
【請求項1】
ロボットアームと、
警備動作の対象となるドアの種類を示す情報を取得する種類取得部と、
前記ドアの種類に基づいて前記ロボットアームを制御して、前記ドアの状態を判定または変更するアーム制御部と、
を有するロボット。
続きを表示(約 930 文字)
【請求項2】
前記アーム制御部は、前記ロボットアームを制御して前記ドアの施錠状態を判定する、
請求項1に記載のロボット。
【請求項3】
前記アーム制御部は、前記ロボットアームが前記ドアの把持部を把持した状態で前記ドアの種類に基づく位置または方向に前記ロボットアームを移動できない場合に、前記ドアが施錠されていると判定する、
請求項2に記載のロボット。
【請求項4】
前記ドアを挟んだエリアの警備状態を判定する判定部と、
前記警備状態が警戒モードであり、かつ前記ドアが施錠されていない場合に、異常を報知する報知部をさらに有する、
請求項2に記載のロボット。
【請求項5】
前記アーム制御部は、ドアの施錠状態を示す情報を前記ドアから取得し、
前記取得した情報が示す施錠状態と、前記ロボットアームを制御することによって判定された施錠状態とが異なる場合に、異常を報知する報知部をさらに有する、
請求項2に記載のロボット。
【請求項6】
前記ロボットアームに配置された撮像部をさらに有し、
前記アーム制御部は、前記撮像部を制御して前記ドアの画像を取得し、前記画像に基づいて前記ドアの施錠状態を判定する、
請求項2に記載のロボット。
【請求項7】
前記ドアの種類に基づく動作位置まで前記ロボットを走行させる走行制御部をさらに有し、
前記アーム制御部は、前記動作位置に前記ロボットが到達した後に、前記ロボットアームを制御して前記ドアの状態を確認または変更する、
請求項1に記載のロボット。
【請求項8】
前記ドアを挟んだエリアの警備状態を判定する判定部をさらに有し、
前記アーム制御部は、前記警備状態にさらに基づいて前記ロボットアームを制御する、
請求項1に記載のロボット。
【請求項9】
前記アーム制御部は、前記警備状態が警戒モードである場合に、前記警備状態を解除モードに変更した後に、前記ロボットアームを制御する、
請求項8に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 920 文字)
【背景技術】
【0002】
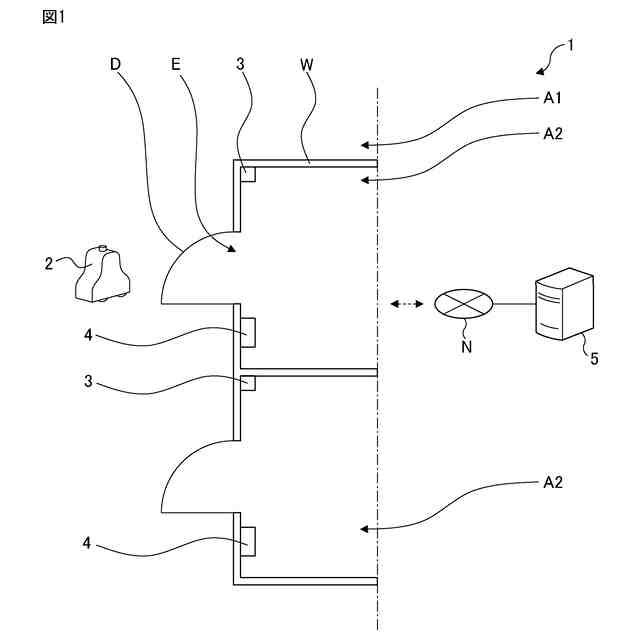
施設内を自律して走行し、ドアの施錠状態の確認、またはドアの施解錠等の警備動作を実行するロボットが知られている。特許文献1には、ドアを撮影した画像からドア識別子を取得し、ドア識別子を参照してドアの解錠を要求するロボット制御装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-130616号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
多数のドアを有する大規模な施設において、個々のドアを識別することは容易ではない。
【0005】
本発明は、多数のドアを有する施設においても適切に警備動作を実行できるロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
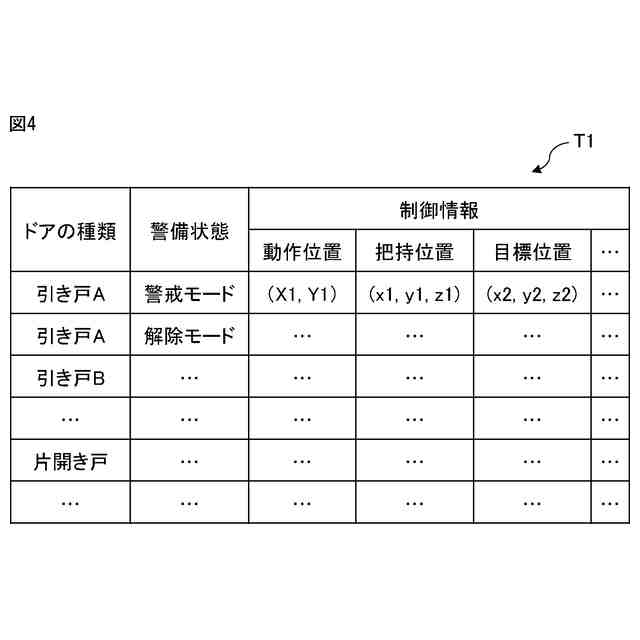
本発明の実施形態に係るロボットは、ロボットアームと、警備動作の対象となるドアの種類を示す情報を取得する種類取得部と、ドアの種類に基づいてロボットアームを制御して、ドアの状態を判定または変更するアーム制御部と、を有する。
【0007】
また、アーム制御部は、ロボットアームを制御してドアの施錠状態を判定することが好ましい。
【0008】
また、アーム制御部は、ロボットアームがドアの把持部を把持した状態でドアの種類に基づく位置または方向に前記ロボットアームを移動できない場合に、ドアが施錠されていると判定することが好ましい。
【0009】
また、ロボットは、ドアを挟んだエリアの警備状態を判定する判定部と、警備状態が警戒モードであり、かつドアが施錠されていない場合に、異常を報知する報知部をさらに有することが好ましい。
【0010】
また、アーム制御部は、ドアの施錠状態を示す情報をドアから取得し、ロボットは、取得した情報が示す施錠状態と、ロボットアームを制御することによって判定された施錠状態とが異なる場合に、異常を報知する報知部をさらに有することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
自律移動ロボット
1か月前
セコム株式会社
火災監視システム
1か月前
セコム株式会社
表示機能付き認証装置
1か月前
セコム株式会社
業務見守りシステム及びプログラム
2日前
セコム株式会社
データ処理装置及びデータ処理方法
1か月前
セコム株式会社
生活見守りシステム及びプログラム
1か月前
セコム株式会社
生活見守りシステム及びプログラム
1か月前
セコム株式会社
業務見守りシステム及びプログラム
2日前
セコム株式会社
自律移動ロボットおよび制御システム
1か月前
セコム株式会社
自律移動ロボットおよび制御システム
1か月前
セコム株式会社
センタ装置、対話システム及び対話方法
1か月前
セコム株式会社
対話システム、対話方法及びセンタ装置
1か月前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1か月前
株式会社デンソーウェーブ
通行管理システム
1か月前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
1か月前
セコム株式会社
自律飛行ロボットの飛行制御システム及び飛行制御方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
25日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
25日前
川崎重工業株式会社
ロボット
2か月前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
学習装置
10日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
トヨタ自動車株式会社
ロボット
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ