TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025124983
公報種別
公開特許公報(A)
公開日
2025-08-27
出願番号
2024020769
出願日
2024-02-15
発明の名称
ジョイントフレーム
出願人
ARMA株式会社
代理人
個人
主分類
B25J
19/00 20060101AFI20250820BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークに対応した設計、多数の構成部品の加工および配管作業が不要で、ワークに対する作業部の配置において自由度が高くコンパクトに最適形状化することができ、外部に配管が露呈することなく軽量化およびスリム化することができると共に、様々なワークに対して汎用的に使用することができるジョイントフレームを提供する。
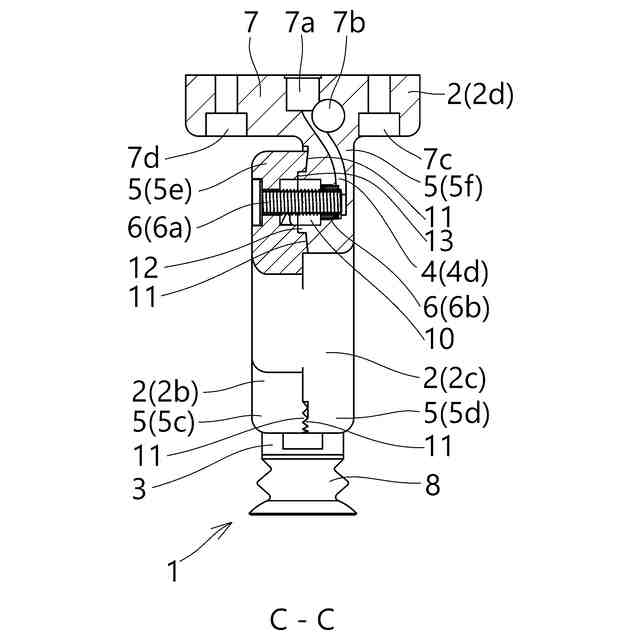
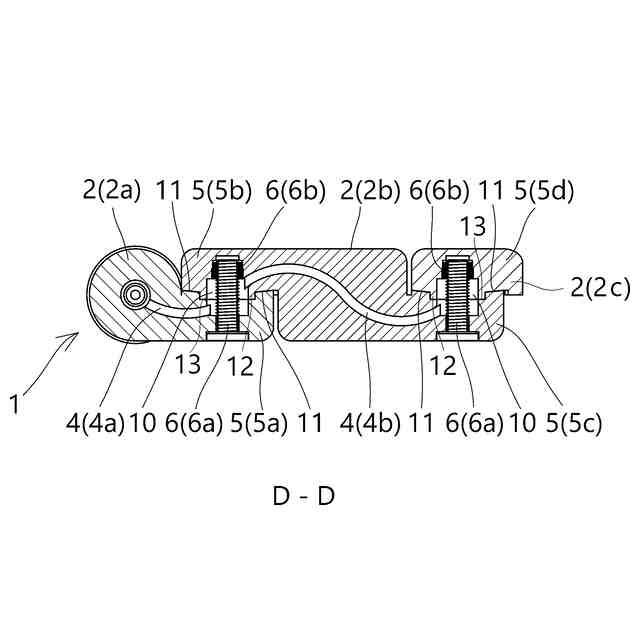
【解決手段】本発明のジョイントフレーム1は、複数のフレーム部2が連接されて構成され、先端にワークに対する作業部3を備えたジョイントフレーム1であって、フレーム部2は内部にそれぞれ流体流通部4を備え、連接したフレーム部2の端部にはそれぞれジョイント部5が設けられ、ジョイント部5同士は固定部材6にて所望角度に固定可能に構成されていると共に、連接されたフレーム部2の流体流通部4は連通している。
【選択図】図1
特許請求の範囲
【請求項1】
複数のフレーム部が連接されて構成され、先端にワークに対する作業部を備えたジョイントフレームであって、
前記フレーム部は内部にそれぞれ流体流通部を備え、連接した前記フレーム部の端部にはそれぞれジョイント部が設けられ、該ジョイント部同士は固定部材にて所望角度に固定可能に構成されていると共に、連接された前記フレーム部の流体流通部は連通していることを特徴とするジョイントフレーム。
続きを表示(約 1,000 文字)
【請求項2】
前記ジョイント部は、連接する前記フレーム部の前記ジョイント部と対向する側に連通用凹部を有し、該連通用凹部は、連接する前記フレーム部の前記ジョイント部の前記連通用凹部との間で連通室が構成される請求項1に記載のジョイントフレーム。
【請求項3】
前記ジョイント部は、連接する前記フレーム部の前記ジョイント部と対向する側に回り止め用係止部を有しており、該回り止め用係止部は、連接する前記フレーム部の前記ジョイント部の前記回り止め用係止部と係合して、連接する前記フレーム部の前記ジョイント部同士が相対的に回動することを防止するように構成されている請求項1に記載のジョイントフレーム。
【請求項4】
前記回り止め用係止部は、前記固定部材の周りに放射状に配され、円周方向に凹条部または凸条部を繰り返して構成され、連接する前記フレーム部の前記ジョイント部の前記回り止め用係止部同士が噛合するように構成されている請求項3に記載のジョイントフレーム。
【請求項5】
前記ジョイント部は、連接する前記フレーム部の前記ジョイント部と対向する側に前記固定部材の周りに設けられた筒状嵌入部を有しており、該筒状嵌入部は、連接する前記フレーム部の前記ジョイント部に設けられ、前記固定部材の周りに設けられた嵌入用凹部に嵌入可能に構成されている請求項1に記載のジョイントフレーム。
【請求項6】
前記ジョイントフレームは、樹脂材料にて形成されている請求項1に記載のジョイントフレーム。
【請求項7】
前記ジョイントフレームの先端に設けられた前記フレーム部は、前記作業部を有している請求項1に記載のジョイントフレーム。
【請求項8】
前記作業部は吸着パッドを有している請求項7に記載のジョイントフレーム。
【請求項9】
前記ジョイントフレームの基端に設けられた前記フレーム部は、取り付け部を有している請求項1に記載のジョイントフレーム。
【請求項10】
前記ジョイントフレームの基端に設けられた前記フレーム部は、前記取り付け部と前記ジョイント部が分離しており、前記ジョイント部は前記取り付け部に対して回動可能で、かつ固定部材にて所望角度の回動位置で固定可能に構成されている請求項9に記載のジョイントフレーム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えばロボットアームの先端等に接続して好適なジョイントフレームに関するものである。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
従来より、ワークの加工や搬送等に使用され、先端部に設けられた作業部に流体を流通させるための配管を備えた構造体が多用されている。例えばそのようなものとして、図20に示したフレーム構造体80がある。
【0003】
このフレーム構造体80は、ロボットアーム100の先端101に平行に並設された第1フレーム81および第2フレーム82と、第1フレーム81および第2フレーム82に直交する方向に平行に並設された第3フレーム83および第4フレーム84と、第3フレーム83および第4フレーム84にそれぞれ離隔して設けられた6つの作業部(吸着パッド)85と、作業部(吸着パッド)85にて吸引するために真空源(図示しない)に接続するためのエアチューブ配管86とを有し、作業部(吸着パッド)85にてワーク(図示しない)を吸着して搬送する際に使用されている。
【0004】
しかし、上記フレーム構造体80では、ワークに対応した設計と多数の構成部品の加工およびエアチューブ配管86による配管作業が必要となる。また、作業部(吸着パッド)85の配置に自由度がなく直線的配置になりがちでワークに対応した最適形状化が困難であった。さらに、重量が嵩むことが多く軽量化が困難であると共に、エアチューブ配管86が露呈しているためスリム化が困難であった。
【先行技術文献】
【特許文献】
【0005】
特開2018-161722号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、本発明の課題は、ワークに対応した設計、多数の構成部品の加工および配管作業が不要で、ワークに対する作業部の配置において自由度が高くコンパクトに最適形状化することができ、外部に配管が露呈することなく軽量化およびスリム化することができると共に、様々なワークに対して汎用的に使用することができるジョイントフレームを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するものは、複数のフレーム部が連接されて構成され、先端にワークに対する作業部を備えたジョイントフレームであって、前記フレーム部は内部にそれぞれ流体流通部を備え、連接した前記フレーム部の端部にはそれぞれジョイント部が設けられ、該ジョイント部同士は固定部材にて所望角度に固定可能に構成されていると共に、連接された前記フレーム部の流体流通部は連通していることを特徴とするジョイントフレームである(請求項1)。
【0008】
前記ジョイント部は、連接する前記フレーム部の前記ジョイント部と対向する側に連通用凹部を有し、該連通用凹部は、連接する前記フレーム部の前記ジョイント部の前記連通用凹部との間で連通室が構成されていることが好ましい(請求項2)。前記ジョイント部は、連接する前記フレーム部の前記ジョイント部と対向する側に回り止め用係止部を有しており、該回り止め用係止部は、連接する前記フレーム部の前記ジョイント部の前記回り止め用係止部と係合して、連接する前記フレーム部の前記ジョイント部同士が相対的に回動することを防止するように構成されていることが好ましい(請求項3)。前記回り止め用係止部は、前記固定部材の周りに放射状に配され、円周方向に凹条部または凸条部を繰り返して構成され、連接する前記フレーム部の前記ジョイント部の前記回り止め用係止部同士が噛合するように構成されていることが好ましい(請求項4)。前記ジョイント部は、連接する前記フレーム部の前記ジョイント部と対向する側に前記固定部材の周りに設けられた筒状嵌入部を有しており、該筒状嵌入部は、連接する前記フレーム部の前記ジョイント部に設けられ、前記固定部材の周りに設けられた嵌入用凹部に嵌入可能に構成されていることが好ましい(請求項5)。前記ジョイントフレームは、樹脂材料にて形成されていることが好ましい(請求項6)。前記ジョイントフレームの先端に設けられた前記フレーム部は、前記作業部を有していることが好ましい(請求項7)。前記作業部は吸着パッドを有していてもよい(請求項8)。前記ジョイントフレームの基端に設けられた前記フレーム部は、取り付け部を有していることが好ましい(請求項9)。前記ジョイントフレームの基端に設けられた前記フレーム部は、前記取り付け部と前記ジョイント部が分離しており、前記ジョイント部は前記取り付け部に対して回動可能で、かつ固定部材にて所望角度の回動位置で固定可能に構成されていてもよい(請求項10)。前記ジョイントフレームは、前記作業部を駆動するための作業駆動部を有していてもよい(請求項11)。
【発明の効果】
【0009】
請求項1に記載したジョイントフレームによれば、ワークに対応した設計、多数の構成部品の加工および配管作業が不要で、ワークに対する作業部の配置において自由度が高くコンパクトに最適形状化することができ、外部に配管が露呈することなく軽量化およびスリム化することができると共に、様々なワークに対して汎用的に使用することができる。
請求項2に記載したジョイントフレームによれば、連接されたフレーム部の流体流通部を、連通室を介してより確実に連通させることができる。
請求項3に記載したジョイントフレームによれば、固定部材により所望角度に固定されたフレーム部のジョイント部同士の固定状態を回り止め用係止部の係合によってより確実に保持できる。
請求項4に記載したジョイントフレームによれば、回り止め用係止部を簡素でかつ係止効果がより確実な構造で構成できる。
請求項5に記載したジョイントフレームによれば、筒状嵌入部を嵌入用凹部に嵌入させることにより、ジョイント部同士の気密性または液密性を保持できる。
請求項6に記載したジョイントフレームによれば、樹脂材料にて形成されることで、筒状嵌入部と嵌入用凹部とをより緊密な嵌合構造とすることができ、ジョイント部同士の気密性または液密性をより保持できると共に、より軽量化することができる。
請求項7に記載したジョイントフレームによれば、作業部を所望角度に固定できる。
請求項8に記載したジョイントフレームによれば、吸着パッドを所望角度に固定できる。
請求項9に記載したジョイントフレームによれば、取り付け部を所望角度に固定でき、取り付けがより容易となる。
請求項10に記載したジョイントフレームによれば、取り付け部を備えたフレーム部が回動可能となることで、作業部の配置自由度がさらに向上する。
請求項11に記載したジョイントフレームによれば、作業部を駆動するための作業駆動部を有することで利便性がより向上する。
【図面の簡単な説明】
【0010】
本発明のジョイントフレームの一実施例の斜視図である。
図1に示したジョイントフレームの内部構造を説明するための透視図である。
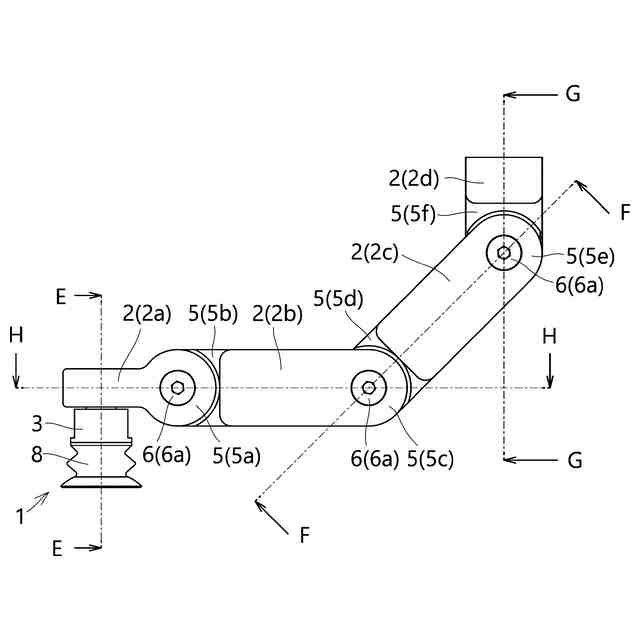
図1に示したジョイントフレームの右側面図である。
図4はA-A線断面図である。
図5はB-B線断面図である。
図6はC-C線断面図である。
図7はD-D線断面図である。
図1に示したジョイントフレームを分解した状態を示す右側面図である。
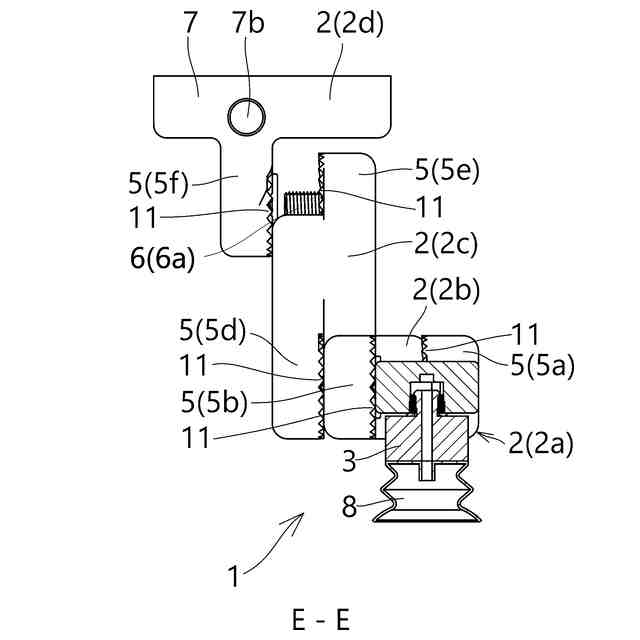
図9はE-E線断面図である。
図10はF-F線断面図である。
図11はG-G線断面図である。
図12はH-H線拡大断面図である。
図1に示したジョイントフレームにおいてジョイント部同士の嵌合状態を説明するための説明図である。
図1に示したジョイントフレームの分解斜視図である。
図1に示したジョイントフレームを分解した状態の内部構造を説明するための透視図である。
本発明のジョイントフレームの他の実施例の斜視図である。
図16の平面図である。
図17の正面図である。
図17の右側面図である。
従来のフレーム構造体の斜視図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る






 特許ウォッチ
特許ウォッチ