TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025105921
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2025076144,2021039219
出願日
2025-05-01,2021-03-11
発明の名称
警備システム、サーバ、警備装置及び作業ロボット
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G08B
25/04 20060101AFI20250703BHJP(信号)
要約
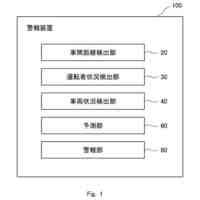
【課題】防災上の異常が発生した場合、作業ロボットの動作を状況に応じて制御可能な警備システム、サーバ、警備装置及び作業ロボットを実現する。
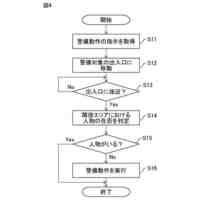
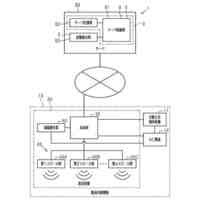
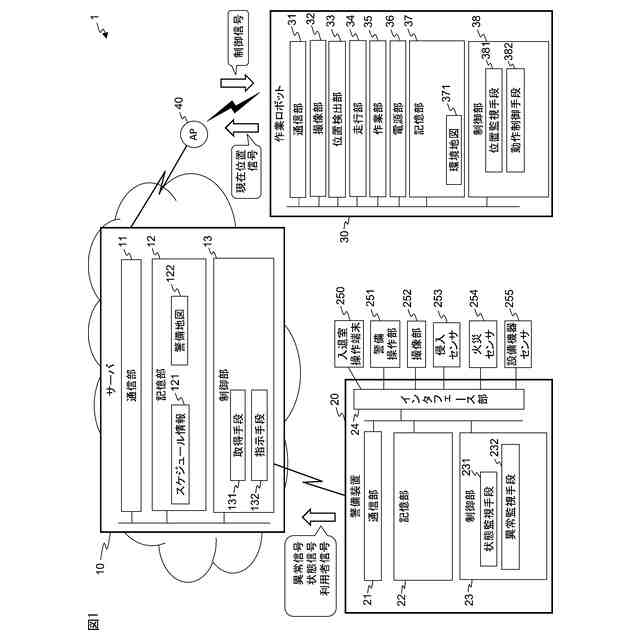
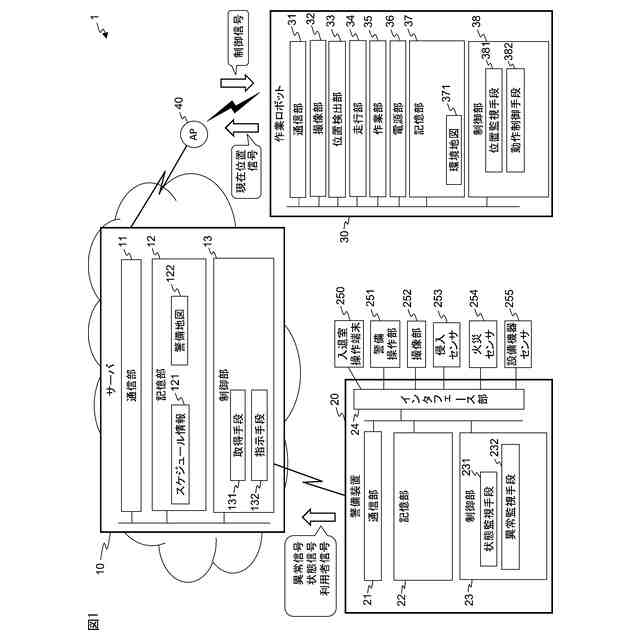
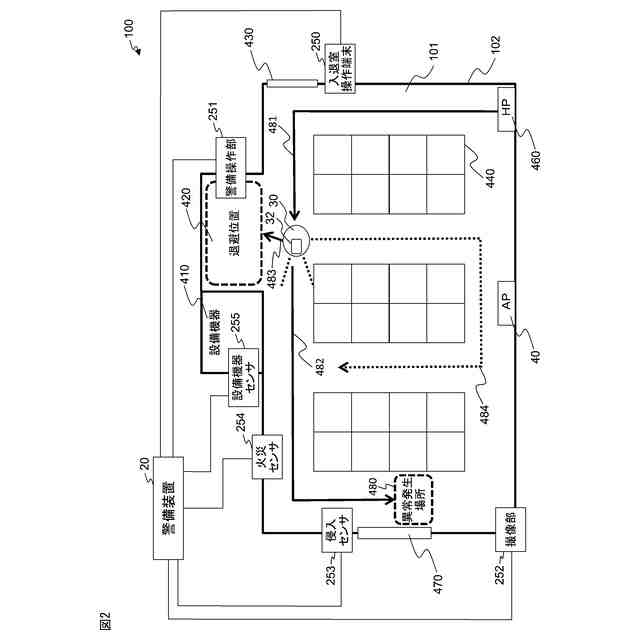
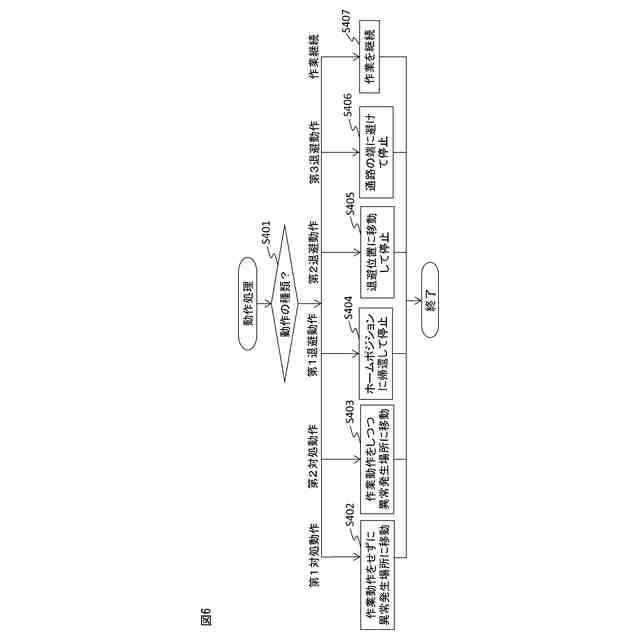
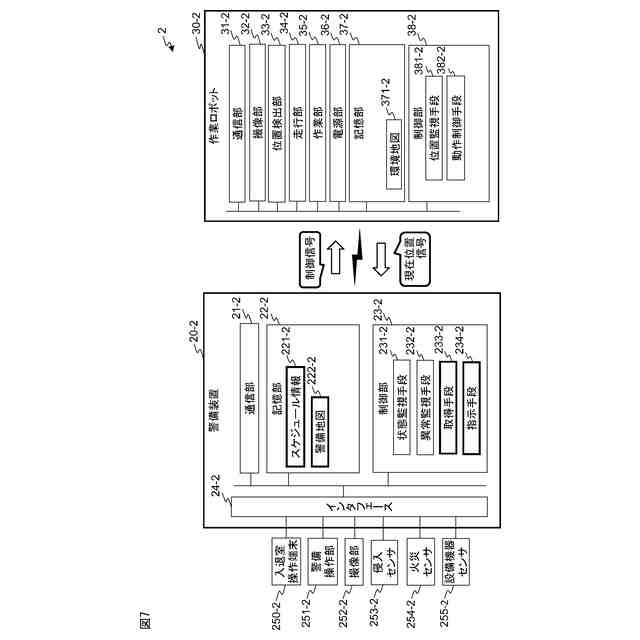
【解決手段】施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、施設の利用者の動線から退避する退避動作を実行可能な作業ロボットと、防災に関する異常を検知して異常信号を出力する警備装置と、を含む警備システムであって、作業ロボットは、作業動作を実行中に警備装置が異常信号を出力した場合、作業動作を中断又は終了して、退避動作を実行するように構成する。
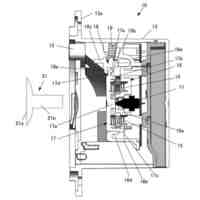
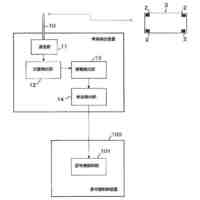
【選択図】図1
特許請求の範囲
【請求項1】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能な作業ロボットと、
防災に関する異常を検知して異常信号を出力する警備装置と、を含む警備システムであって、
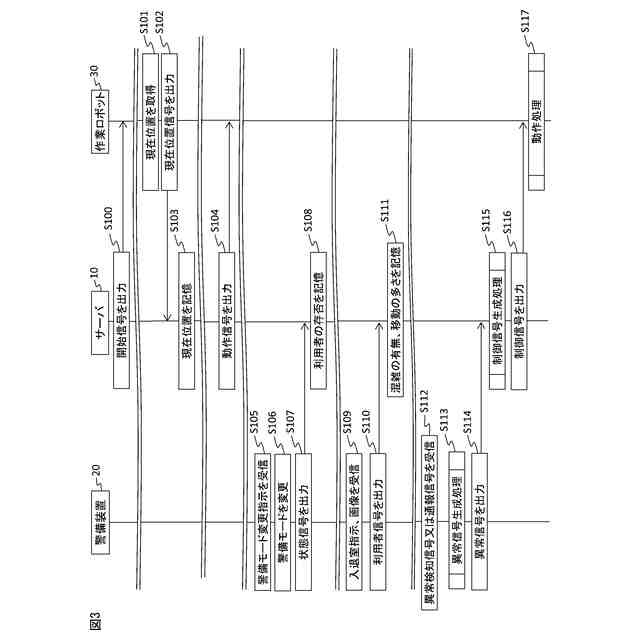
前記作業ロボットは、現在位置情報を取得し、前記作業動作を実行中に前記警備装置が前記異常信号を出力した場合、前記作業動作を中断又は終了して、前記退避動作を実行し、
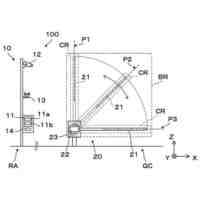
前記退避動作には、前記作業ロボットが前記利用者の動線を避けた位置に停止する動作が含まれ、
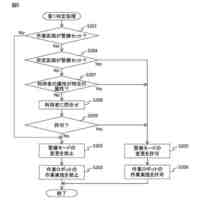
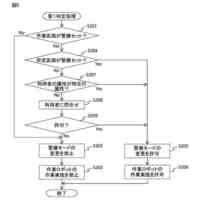
前記退避動作における前記利用者の動線を避けた位置は、前記作業ロボットの現在位置に応じて、通路の端位置と、通路から外れた位置に予め設定された退避位置とのうち、いずれかに設定される、
ことを特徴とする警備システム。
続きを表示(約 3,100 文字)
【請求項2】
前記退避動作における前記利用者の動線を避けた位置は、前記作業ロボットの現在位置と前記退避位置との位置関係に応じて、前記通路の端位置と前記退避位置とのうち、いずれかに設定される、請求項1に記載の警備システム。
【請求項3】
前記退避動作における前記利用者の動線を避けた位置は、前記作業ロボットの現在位置から前記退避位置までの距離が所定距離未満である場合は当該退避位置に設定され、所定距離以上である場合は前記通路の端位置に設定される、請求項1に記載の警備システム。
【請求項4】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能な作業ロボットと、
防災に関する異常を検知して異常信号を出力する警備装置と、を含む警備システムであって、
前記退避動作には、前記作業ロボットが前記利用者の動線を避けた位置に停止する動作又は前記作業ロボットのホームポジションに帰還する動作が含まれ、
前記作業ロボットは、
現在位置情報を取得し、
前記作業動作を実行中に前記警備装置が前記異常信号を出力した場合、前記作業動作を中断又は終了して、前記退避動作を実行し、
前記退避動作として、前記現在位置情報と前記ホームポジションとの位置関係に応じて、前記利用者の動線を避けた位置に停止する動作と、前記ホームポジションに帰還する動作とのうち、いずれかを実行する、
ことを特徴とする警備システム。
【請求項5】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能な作業ロボットと、
防災に関する異常を検知して異常信号を出力する警備装置と、を含む警備システムであって、
前記作業ロボットは、前記作業動作を実行中に前記警備装置が前記異常信号を出力した場合、前記作業動作を中断又は終了して、前記退避動作を実行し、
前記警備装置は、警備対象に利用者が存在するか否かを記憶する記憶手段を備え、
前記作業ロボットは、前記異常が検知された場合であって、前記利用者が存在する場合は前記退避動作を実行し、前記利用者が存在しない場合は異常発生場所に移動する動作を実行する、
ことを特徴とする警備システム。
【請求項6】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能な作業ロボット、及び、防災に関する異常を検知して、異常信号を出力する警備装置と通信可能に接続されたサーバであって、
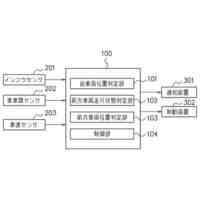
前記警備装置から前記異常信号を受信した場合、前記作業ロボットにより実行中の作業動作を中断又は終了して、前記退避動作を実行させるための制御信号を生成する制御部と、
前記制御信号を前記作業ロボットへ送信するための送信部と、を有し、
前記退避動作には、前記作業ロボットが前記利用者の動線を避けた位置に停止する動作が含まれ、
前記退避動作における前記利用者の動線を避けた位置は、前記作業ロボットの現在位置に応じて、通路の端位置と、通路から外れた位置に予め設定された退避位置とのうち、いずれかに設定される、
ことを特徴とするサーバ。
【請求項7】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能な作業ロボット、及び、防災に関する異常を検知して、異常信号を出力する警備装置と通信可能に接続されたサーバであって、前記退避動作には、前記作業ロボットが前記利用者の動線を避けた位置に停止する動作又は前記作業ロボットのホームポジションに帰還する動作が含まれ、
前記警備装置から前記異常信号を受信した場合、前記作業ロボットにより実行中の作業動作を中断又は終了して、前記退避動作として、前記作業ロボットの現在位置情報と前記ホームポジションとの位置関係に応じて、前記利用者の動線を避けた位置に停止する動作と、前記ホームポジションに帰還する動作とのうち、いずれかを実行させるための制御信号を生成する制御部と、
前記制御信号を前記作業ロボットへ送信するための送信部と、
を有することを特徴とするサーバ。
【請求項8】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能な作業ロボットと通信可能に接続された警備装置であって、
防災に関する異常を検知するための検知部と、
防災に関する異常を検知した場合、前記作業ロボットにより実行中の前記作業動作を中断又は終了して、前記退避動作を実行させるための制御信号を生成する制御部と、
前記制御信号を前記作業ロボットへ送信するための送信部と、を有し、
前記退避動作には、前記作業ロボットが前記利用者の動線を避けた位置に停止する動作が含まれ、
前記退避動作における前記利用者の動線を避けた位置は、前記作業ロボットの現在位置に応じて、通路の端位置と、通路から外れた位置に予め設定された退避位置とのうち、いずれかに設定される、
ことを特徴とする警備装置。
【請求項9】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能な作業ロボットと通信可能に接続された警備装置であって、前記退避動作には、前記作業ロボットが前記利用者の動線を避けた位置に停止する動作又は前記作業ロボットのホームポジションに帰還する動作が含まれ、
防災に関する異常を検知するための検知部と、
防災に関する異常を検知した場合、前記作業ロボットにより実行中の前記作業動作を中断又は終了して、前記退避動作として、前記作業ロボットの現在位置情報と前記ホームポジションとの位置関係に応じて、前記利用者の動線を避けた位置に停止する動作と、前記ホームポジションに帰還する動作とのうち、いずれかを実行させるための制御信号を生成する制御部と、
前記制御信号を前記作業ロボットへ送信するための送信部と、を有する、
ことを特徴とする警備装置。
【請求項10】
施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、前記施設の利用者の動線から退避する退避動作を実行可能であって、防災に関する異常を検知して異常信号を出力する警備装置と通信可能に接続された作業ロボットであって、
前記警備装置より前記異常信号を受信するための受信部と、
前記作業ロボットの動作を行うための動作機構と、
前記受信部が前記異常信号を受信した場合、実行中の前記作業動作を中断又は終了して、前記退避動作を実行するように前記動作機構を制御する制御部と、を有し、
前記退避動作には、前記作業ロボットが前記利用者の動線を避けた位置に停止する動作が含まれ、
前記退避動作における前記利用者の動線を避けた位置は、前記作業ロボットの現在位置に応じて、通路の端位置と、通路から外れた位置に予め設定された退避位置とのうち、いずれかに設定される、
ことを特徴とする作業ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、警備システム、サーバ、警備装置及び作業ロボットに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、防災上の異常事態が発生した場合に、ロボットに所定の動作を行わせようとすることが知られている。
【0003】
例えば、特許文献1には、掃除ロボットが火災センサを有しており、火災センサにより火災が発生したと判断した場合には、掃除ロボットを火災発生場所に向かわせ、利用者を出入口に誘導することが開示されている。
【先行技術文献】
【特許文献】
【0004】
特表2018-517966号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、異常の発生現場へロボットが向かった方が良い場合がある一方、異常の発生現場にロボットが向かうと状況が悪化してしまうような場合も存在する。例えば、特許文献1のように掃除ロボットが火災発生場所に向かうと、利用者の避難の妨げとなる可能性がある。そのため、防災上の異常が発生した場合、ロボットに一律の動作を取らせることは好ましくない。
【0006】
本発明の目的は、防災上の異常が発生した場合、作業ロボットの動作を状況に応じて制御可能な警備システム、サーバ、警備装置及び作業ロボットを提供することである。
【課題を解決するための手段】
【0007】
かかる課題を解決するための本発明の一態様によれば、施設内において自律移動可能で、少なくとも、所定の作業を行う作業動作、及び、施設の利用者の動線から退避する退避動作を実行可能な作業ロボットと、防災に関する異常を検知して異常信号を出力する警備装置と、を含む警備システムであって、作業ロボットは、作業動作を実行中に警備装置が異常信号を出力した場合、作業動作を中断又は終了して、退避動作を実行する、警備システムを提供する。
【0008】
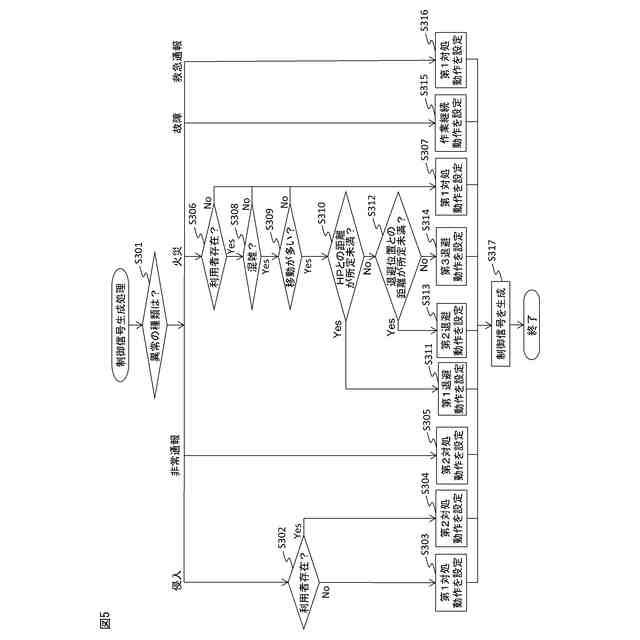
この警備システムにおいて、退避動作には、作業ロボットが利用者の動線を避けた位置に停止する動作又は作業ロボットのホームポジションに帰還する動作が含まれることが好ましい。
【0009】
この警備システムにおいて、作業ロボットは、現在位置情報を取得し、退避動作として、現在位置情報とホームポジションとの位置関係に応じて、利用者の動線を避けた位置に停止する動作と、ホームポジションに帰還する動作とのうち、いずれかを実行することが好ましい。
【0010】
この警備システムにおいて、作業ロボットは、現在位置情報を取得し、利用者の動線を避けた位置は、通路の端位置と、通路から外れた位置に予め設定された退避位置とを含み、
利用者の動線を避けた位置として、作業ロボットの現在位置から退避位置までの距離が所定距離未満である場合は当該退避位置を設定し、所定距離以上である場合は通路の端位置を設定することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
自律走行ロボット
22日前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
16日前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
16日前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
16日前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
16日前
セコム株式会社
携帯端末、警備システム、プログラム及び表示方法
10日前
日本精機株式会社
警報システム
18日前
個人
自動電動車椅子
1日前
スズキ株式会社
運転支援装置
17日前
エムケー精工株式会社
車両誘導装置
24日前
ニッタン株式会社
発信機
2か月前
株式会社国際電気
防災システム
21日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
検知器
11日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
検知器
9日前
ニッタン株式会社
検知器
9日前
トヨタ自動車株式会社
車両
1か月前
TOA株式会社
拡声放送システム
2か月前
日本信号株式会社
信号情報システム
2か月前
日本信号株式会社
情報提供システム
2か月前
個人
乗り物の移動を支援する方法及び装置
2か月前
株式会社小糸製作所
移動体検出装置
11日前
株式会社JVCケンウッド
警報装置
2か月前
日本精機株式会社
報知装置及び報知システム
今日
株式会社小糸製作所
車両検出システム
11日前
個人
現示内容に関する情報放送機能付き信号機
1か月前
日本信号株式会社
交通信号制御システム
2か月前
トヨタ自動車株式会社
回避動作判別装置
2か月前
能美防災株式会社
火災感知器
14日前
能美防災株式会社
非常伝達装置
17日前
ホーチキ株式会社
火災検出システム
2か月前
ヨシモトポール株式会社
接近報知システム
14日前
株式会社豊田自動織機
制御システム
2か月前
本田技研工業株式会社
運転評価装置
1か月前
本田技研工業株式会社
情報提供装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ