TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136169
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034412
出願日
2024-03-06
発明の名称
ハンドおよびコネクタ接続方法
出願人
倉敷紡績株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20250911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】コネクタが小さく、相手方コネクタとの接続の際のクリアランスが3次元計測の精度やロボットの位置精度と同程度以下である場合にも、コネクタを把持して相手方コネクタに接続可能なハンドを提供する。
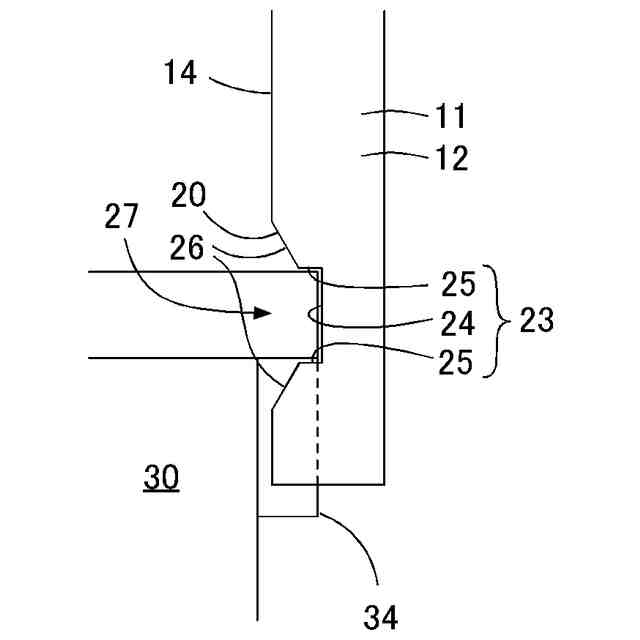
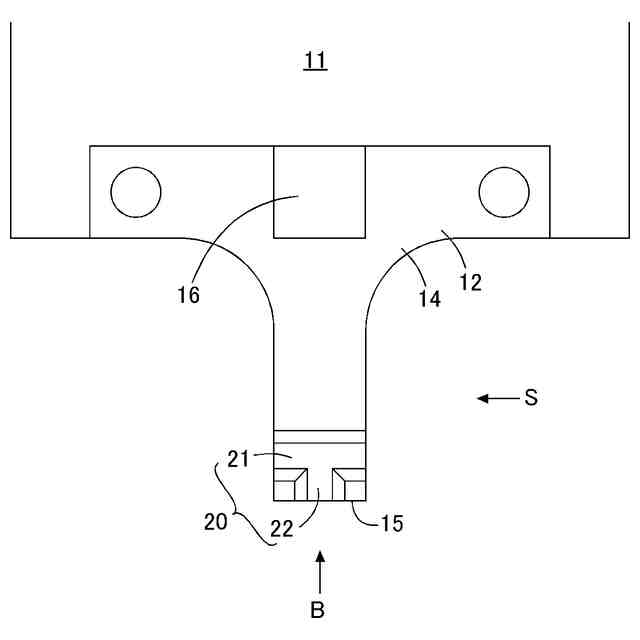
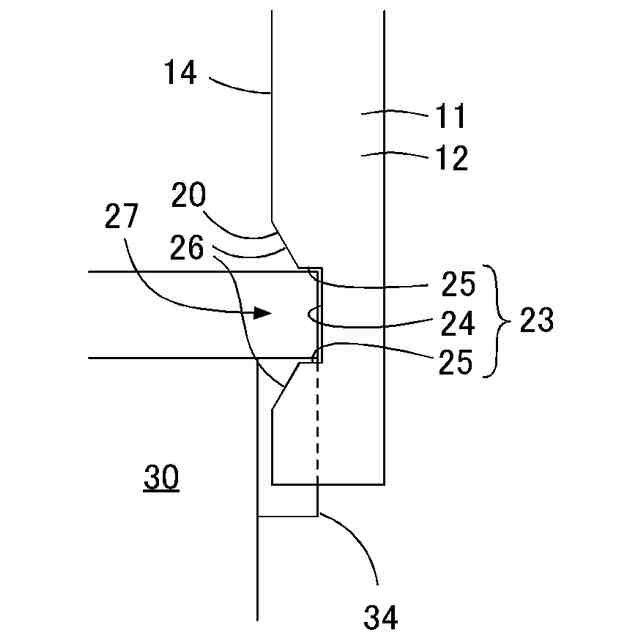
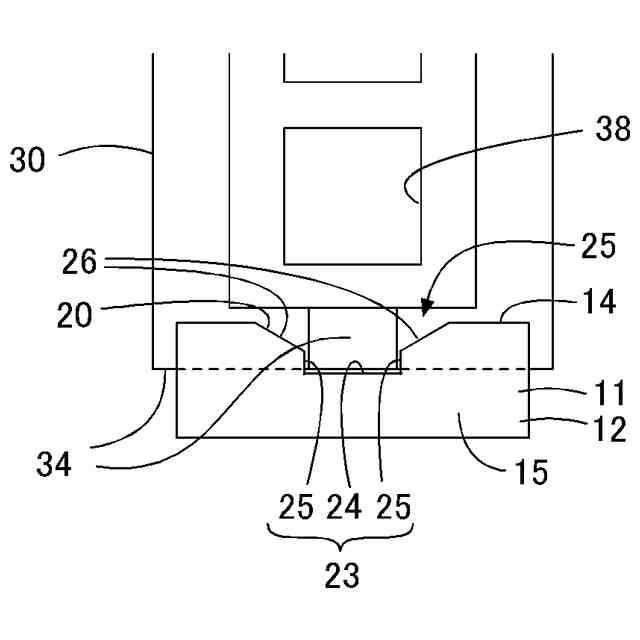
【解決手段】一対の指11で小型のコネクタ30を把持するハンドであって、前記指は、他方の前記指に面した把持面に、前記コネクタの側面に設けられた突条34を受け入れ可能な溝20を備える。そして、前記溝は、底面24および該底面から立ち上がる壁面25を有し、前記突条が嵌入して、前記突条の位置を規制する位置規制部23と、前記壁面の前記底面と反対側の端から前記溝の開口27にかけて、前記溝の幅が徐々に大きくなるように形成されたガイド部26とを有する。
【選択図】図4
特許請求の範囲
【請求項1】
一対の指で小型のコネクタを把持するハンドであって、
前記指は、他方の前記指に面した把持面に、前記コネクタの側面に設けられた突条を受け入れ可能な溝を備え、
前記溝は、
底面および該底面から立ち上がる壁面を有し、前記突条が嵌入して、前記突条の位置を規制する位置規制部と、
前記壁面の前記底面と反対側の端から前記溝の開口にかけて、前記溝の幅が徐々に大きくなるように形成されたガイド部とを有する、
ハンド。
続きを表示(約 530 文字)
【請求項2】
前記溝は、前記把持面の面内で少なくとも異なる2方向に延びる部分を有する、
請求項1に記載のハンド。
【請求項3】
前記溝は、前記把持面の面内で1方向に延び、前記壁面が前記底面の4周から立ち上がる、
請求項1に記載のハンド。
【請求項4】
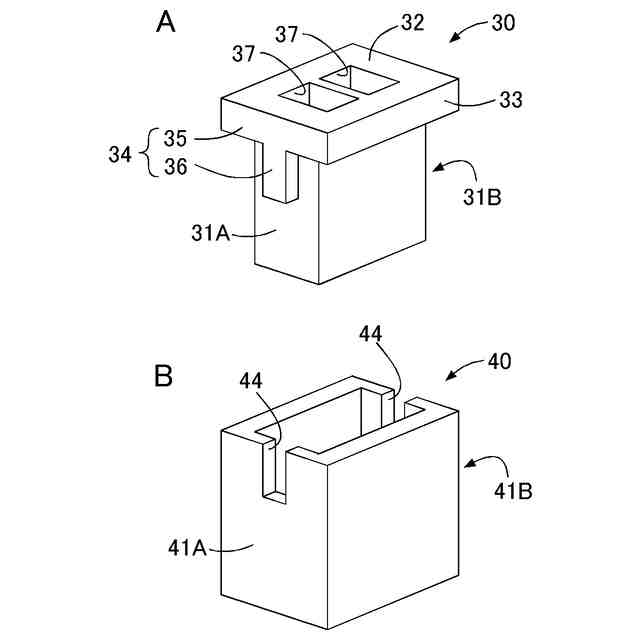
前記把持面は、前記コネクタから延びるケーブルを収容するケーブルパス部をさらに有する、
請求項1~3のいずれか一項に記載のハンド。
【請求項5】
請求項1~3のいずれかに記載されたハンドを用いたコネクタ接続方法であって、
ケーブルの先端に装着された前記コネクタの位置および姿勢を取得する工程と、
前記ハンドで前記コネクタの前記側面を把持する工程と、
前記コネクタを接続する相手方コネクタの位置および姿勢を取得する工程と、
前記ハンドを移動させて、前記コネクタの先端を前記相手方コネクタに挿入する工程と、
前記ハンドが前記コネクタを解放する工程と、
前記ハンドが前記コネクタの後端を押して、前記コネクタの全体を前記相手方コネクタに押し込む工程と、
を有するコネクタ接続方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、各種家電や電子機器の組み立て製造現場で、ロボットを用いてコネクタの接続作業を自動化するためのハンドおよび接続方法に関し、より詳細には、極小のコネクタの接続作業を自動化するためのハンドおよび接続方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ケーブルに装着されたコネクタの位置および向きを3次元計測して、ロボットハンドで把持して相手方コネクタに接続することが、従来から行われている。また、各種装置を小型化するためにコネクタもより小型のものが用いられることに対応して、小型のコネクタに対してその位置および向きをより精確に計測するための開発が行われている。
【0003】
特許文献1には、略直方体状のコネクタの側面に直線状等のマークを設け、このマークを利用してコネクタの位置および向きを計測して、コネクタの後方のエッジ部分をロボットハンドで把持することが記載されている。マークを利用することにより、コネクタが小さくかつケーブルに接続された状態でも、コネクタの後方エッジを精度よく計測することを可能としていた。
【0004】
特許文献2には、微小なコネクタを含む画像データからコネクタに関する画像部分を切り出し、学習済みの特徴点推定機械学習モデルに入力して、コネクタの特徴点を推定することが記載されている。これにより、柔軟で可撓性のあるケーブルの端に取り付けられたコネクタが、僅かな外力で姿勢や位置が変わってしまうような場合でも、リアルタイムで認識されるコネクタの姿勢及び位置に関するデータをロボットに与え続けることができる。
【先行技術文献】
【特許文献】
【0005】
特開2021-096081号公報
特開2023-034203号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、近年コネクタの小型化がさらに進み、例えば、コネクタと相手方コネクタとの接続の際のクリアランスが数十μmになって3次元計測の精度やロボットの位置精度と同程度になると、特許文献1および2に記載された方法を用いても、把持したコネクタの位置および向きの精度が、相手方コネクタとの接続に十分でない場合があった。
【0007】
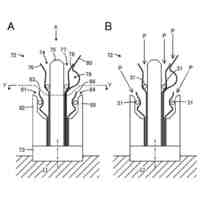
特許文献1に記載されたロボットハンドでは、一対の把持部の先端付近に向かい合うように形成されたV字溝で、コネクタの後方エッジである鍔の対辺を挟み込むことにより、コネクタを正確な向きで把持し、把持後にもコネクタの向きがずれることがないとされる。しかし、特許文献1のロボットハンドでは、把持したコネクタのV字溝の長手方向における位置精度は、V字溝によっては規制されず、3次元計測の精度やロボットの位置精度に依存する。また、コネクタがより小型化して、鍔の厚さが1mm程度以下になると、鍔が4本のエッジでV字溝と接するのではなく、3本のエッジでV字溝と接して、鍔が一対の把持部に対して斜めになった状態で、コネクタの位置が固定されてしまうことがあった。その場合、コネクタが想定された向きで把持されていないため、結果として相手方コネクタとの接続がうまくいかないことがあった。
【0008】
本発明は、上記を考慮してなされたものであり、コネクタが小さく、相手方コネクタとの接続の際のクリアランスが3次元計測の精度やロボットの位置精度と同程度以下である場合にも、コネクタを把持して相手方コネクタに接続可能なハンドを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のハンドは、一対の指で小型のコネクタを把持するハンドであって、前記指は、他方の前記指に面した把持面に、前記コネクタの側面に設けられた突条を受け入れ可能な溝を備える。そして、前記溝は、底面および該底面から立ち上がる壁面を有し、前記突条が嵌入して、前記突条の位置を規制する位置規制部と、前記壁面の前記底面と反対側の端から前記溝の開口にかけて、前記溝の幅が徐々に大きくなるように形成されたガイド部とを有する。
【0010】
好ましくは、前記溝は、前記把持面の面内で少なくとも異なる2方向に延びる部分を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
倉敷紡績株式会社
外構ユニット
1か月前
倉敷紡績株式会社
線状物の3次元計測方法
1か月前
倉敷紡績株式会社
セメント系造形物の製造方法
1か月前
倉敷紡績株式会社
セメント系造形物の製造方法
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2か月前
倉敷紡績株式会社
ダイシングシート用基材フィルム
20日前
倉敷紡績株式会社
詰め物用糸及びこれを含む中綿構造体
1か月前
倉敷紡績株式会社
繊維強化無機成形体、及びその製造方法
1か月前
倉敷紡績株式会社
清涼性混紡紡績糸及びこれを用いた清涼性生地
3か月前
倉敷紡績株式会社
線状物保持ブロック、線状物保持治具および装置
1か月前
倉敷紡績株式会社
ケーブル保持治具、ケーブル処理システムおよびケーブル処理方法
1か月前
倉敷紡績株式会社
セルロース系グラフト繊維、これを含む繊維構造体及びその製造方法
2か月前
倉敷紡績株式会社
コネクタ接続システム、リード線制御装置、コネクタ接続方法およびリード線移動方法
2か月前
個人
折りたたみ工具
2か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
22日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
製函機
2か月前
CKD株式会社
把持装置
2か月前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
学習装置
7日前
株式会社三協システム
移載装置
2か月前
川崎重工業株式会社
ハンド
1か月前
株式会社不二越
ロボット操作装置
2か月前
SMC株式会社
着脱装置
2か月前
株式会社ミクロブ
把持装置
2か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
太陽パーツ株式会社
アシストスーツ
2か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
本田技研工業株式会社
装置
2か月前
株式会社不二越
エッジ仕上げ装置
2か月前
株式会社不二越
ロボットシステム
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ