TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132806
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024030613
出願日
2024-02-29
発明の名称
着脱装置
出願人
SMC株式会社
代理人
弁理士法人桐朋
主分類
B25J
15/04 20060101AFI20250903BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】大型化することを回避することができ、また、ピストン、カム部材及び係合ボールを含んで構成されるシリンダ部において、大きなリフト力が得られる着脱装置を提供する。
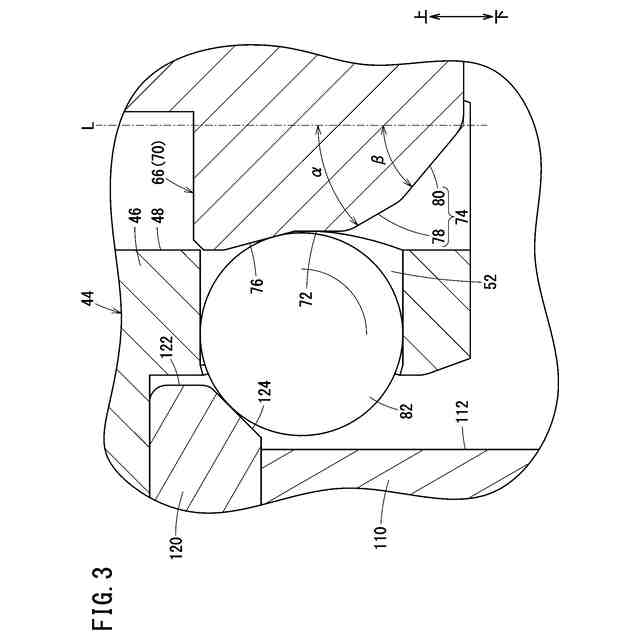
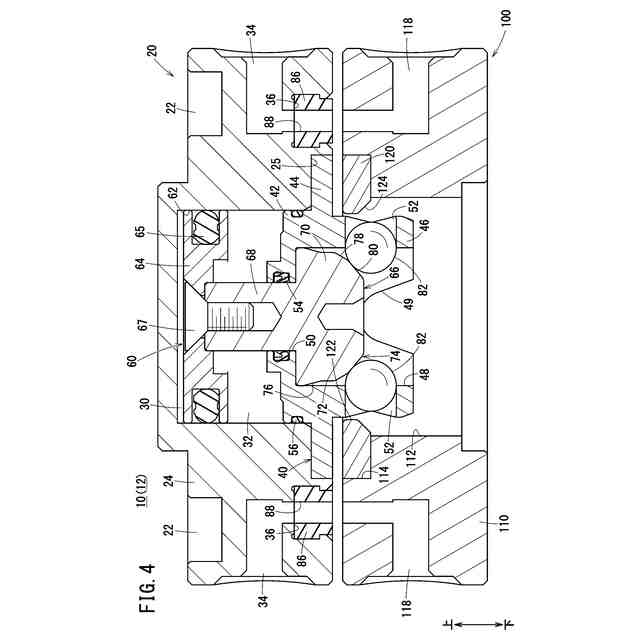
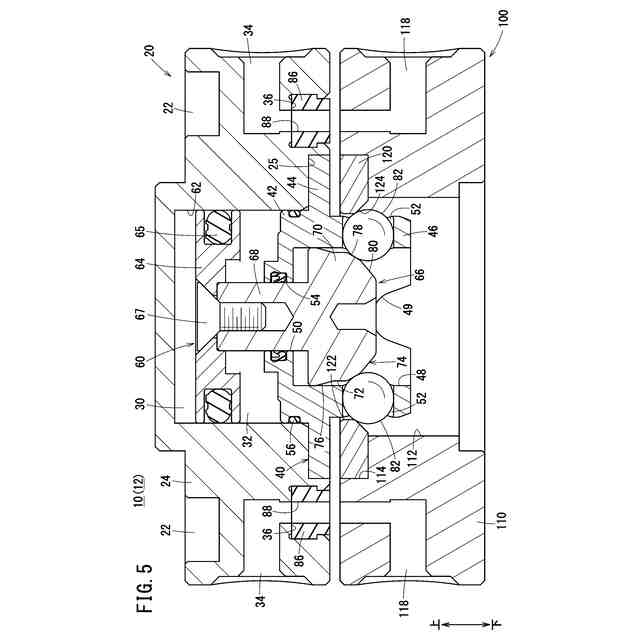
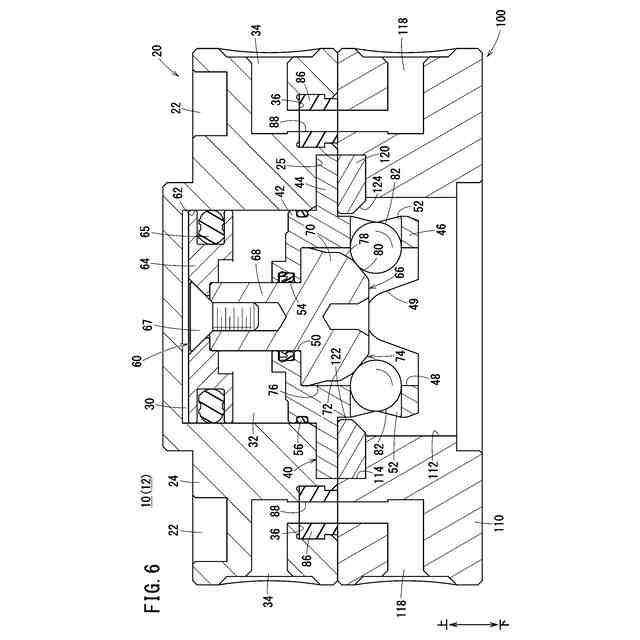
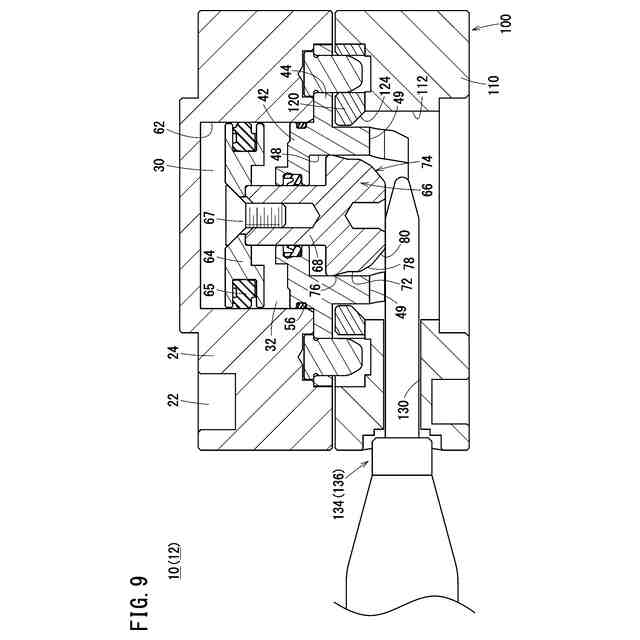
【解決手段】着脱装置の第1アダプタは、ピストンと一体的に変位するカム部材66を備える。カム部材66の側面は、カム側係合面72、第1カム面78及び第2カム面80を有する。第1カム面78は、ピストンの変位方向においてカム側係合面72に隣接する。第2カム面80は、ピストンの変位方向において第1カム面78に隣接する。第1カム面78と、ピストンの変位方向との交差角度を第1角度αとする。第2カム面80と、ピストンの変位方向との交差角度を第2角度βとする。第1角度αは、第2角度βよりも小さい。
【選択図】図3
特許請求の範囲
【請求項1】
第1アダプタと、前記第1アダプタに着脱可能な第2アダプタとを備える着脱装置であって、
前記第1アダプタは、作動流体の給排によって駆動されるピストンと、前記ピストンに一体的に連結されるカム部材と、前記カム部材の側面に当接する係合ボールとを備え、前記カム部材がロック位置にあるとき、前記係合ボールが突出して前記第1アダプタと前記第2アダプタとの分離が阻止され、前記カム部材がアンロック位置にあるとき、前記係合ボールが退避して前記第1アダプタと前記第2アダプタとの分離が許容され、
前記カム部材の前記側面は、前記ロック位置において前記係合ボールが当接するカム側係合面と、前記アンロック位置において前記係合ボールが当接するテーパー面とを有し、
前記テーパー面は、前記ピストンの変位方向において前記カム側係合面に隣接する第1カム面と、前記ピストンの前記変位方向において前記第1カム面に隣接する第2カム面とを有し、
前記第1カム面と、前記ピストンの前記変位方向との交差角度である第1角度が、前記第2カム面と、前記ピストンの前記変位方向との交差角度である第2角度よりも小さい、着脱装置。
続きを表示(約 700 文字)
【請求項2】
請求項1に記載の着脱装置において、前記第2角度から前記第1角度を引いた角度差が5°~60°である、着脱装置。
【請求項3】
請求項1に記載の着脱装置において、前記第1角度が15°~45°であり、前記第2角度が45°~70°である、着脱装置。
【請求項4】
請求項1に記載の着脱装置において、前記第2アダプタは、前記ロック位置において前記係合ボールが当接するとともに、前記アンロック位置において前記係合ボールが離間するアダプタ側係合面を有する、着脱装置。
【請求項5】
請求項4に記載の着脱装置において、前記カム部材は、前記ロック位置において前記カム側係合面と前記アダプタ側係合面との間に挟まれた前記係合ボールが前記ピストンに向かって変位することを阻止するストッパ部を有する、着脱装置。
【請求項6】
請求項1に記載の着脱装置において、前記第1アダプタは、第1アダプタボディとクランプベースとを備え、前記クランプベースは、前記係合ボールを移動可能に保持した保持孔を有する、着脱装置。
【請求項7】
請求項1に記載の着脱装置において、前記第2アダプタは、解除操作具が挿入される分離操作孔を有し、前記分離操作孔に挿入された前記解除操作具は、前記第2カム面に当接する、着脱装置。
【請求項8】
請求項1~7のいずれか1項に記載の着脱装置において、前記着脱装置はエンドエフェクタ交換装置であり、前記第1アダプタがロボットに取り付けられ、前記第2アダプタにエンドエフェクタが取り付けられる、着脱装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、着脱装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
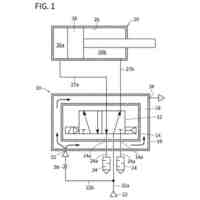
着脱装置の一例として、エンドエフェクタ交換装置が挙げられる。エンドエフェクタ交換装置は、ロボットの先端アームに設けられる第1アダプタと、エンドエフェクタが取り付けられる第2アダプタとを備える。ロボットにおいて、あるエンドエフェクタから別のエンドエフェクタに交換する場合、第2アダプタが第1アダプタから分離される。その後、別のエンドエフェクタが予め取り付けられた第2アダプタが、第1アダプタに分離可能に連結される。
【0003】
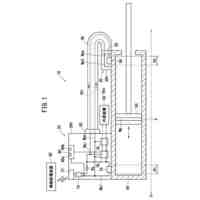
第1アダプタは、シリンダ部を備える。第1アダプタと第2アダプタとの連結が不十分である場合、第1アダプタにおける第2アダプタを向く第1端面と、第2アダプタにおける第1アダプタを向く第2端面との間に隙間が形成される。このような場合、シリンダは、第2アダプタを第1アダプタに向かって引き寄せるように動作し、第1端面と第2端面とを互いに当接させる。
【0004】
このため、シリンダ部は、大きなリフト力を出力する必要がある。なお、リフト力とは、第2アダプタを第1アダプタに向かって引き寄せる力である。特許文献1には、主ピストン部材にロッド部材を介して補助ピストン部材を直列に連結し、これにより受圧面積を大きくする構成が記載されている。この構成では、シリンダ部が大きな推進力を出力可能であるので、リフト力が大きくなる。
【先行技術文献】
【特許文献】
【0005】
国際公開第2017/212791号
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されるように2個のピストン部材を直列に並べる構成では、ピストン部材の変位方向におけるエンドエフェクタ交換装置の長さが大きくなる。すなわち、エンドエフェクタ交換装置が大型化する。
【0007】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0008】
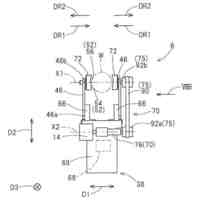
本開示の態様は、第1アダプタと、前記第1アダプタに着脱可能な第2アダプタとを備える着脱装置である。前記第1アダプタは、作動流体の給排によって駆動されるピストンと、前記ピストンに一体的に連結されるカム部材と、前記カム部材の側面に当接する係合ボールとを備える。前記カム部材がロック位置にあるとき、前記係合ボールが突出して前記第1アダプタと前記第2アダプタとの分離が阻止される。前記カム部材がアンロック位置にあるとき、前記係合ボールが退避して前記第1アダプタと前記第2アダプタとの分離が許容される。
【0009】
前記カム部材の前記側面は、前記ロック位置において前記係合ボールが当接するカム側係合面と、前記アンロック位置において前記係合ボールが当接するテーパー面とを有する。前記テーパー面は、前記ピストンの変位方向において前記カム側係合面に隣接する第1カム面と、前記ピストンの前記変位方向において前記第1カム面に隣接する第2カム面とを有する。以上の構成において、前記第1カム面と、前記ピストンの前記変位方向との交差角度である第1角度は、前記第2カム面と、前記ピストンの前記変位方向との交差角度である第2角度よりも小さい。
【発明の効果】
【0010】
本発明によれば、着脱装置が大型化することを回避することができる。また、ピストン、カム部材及び係合ボールを含んで構成されるシリンダ部において、大きなリフト力が得られる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
SMC株式会社
着脱装置
2か月前
SMC株式会社
増圧装置
17日前
SMC株式会社
マグネットチャック
4日前
SMC株式会社
バルブユニット及び増圧弁
1か月前
SMC株式会社
位置検出装置およびアクチュエータ
2か月前
SMC株式会社
チャック装置およびチャックシステム
25日前
SMC株式会社
イオナイザ用取付具、それを有するイオナイザ、及びそれを用いた取付構造
20日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
19日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
学習装置
4日前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
28日前
株式会社マキタ
ハンマドリル
28日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社不二越
移動ロボットシステム
1か月前
株式会社安川電機
ロボット
25日前
本田技研工業株式会社
装置
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社不二越
垂直多関節ロボット
4日前
株式会社三共コーポレーション
工具保持具
19日前
トヨタ自動車株式会社
軌道生成装置
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
アネックスツール株式会社
ドライバービット
1か月前
トヨタ自動車株式会社
ロボットハンド
25日前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
回転打撃工具
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
NTN株式会社
ハンド
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ