TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025129514
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026195
出願日
2024-02-26
発明の名称
把持固定機構、及び把持固定ロボットハンド
出願人
広島県
代理人
個人
主分類
B25J
15/00 20060101AFI20250829BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】表面形状が複雑な固体対象物を把持して固定化することができる把持固定機構、及び、把持固定ロボットハンドを提供することを提供することを課題とする。
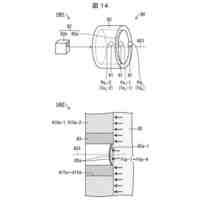
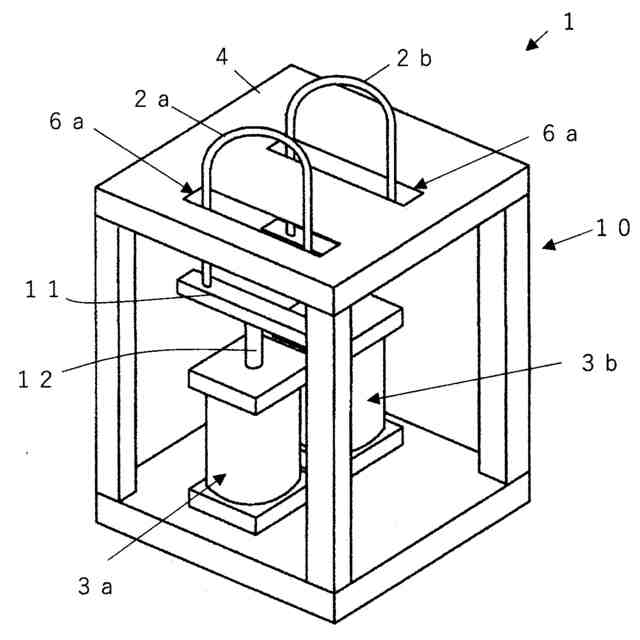
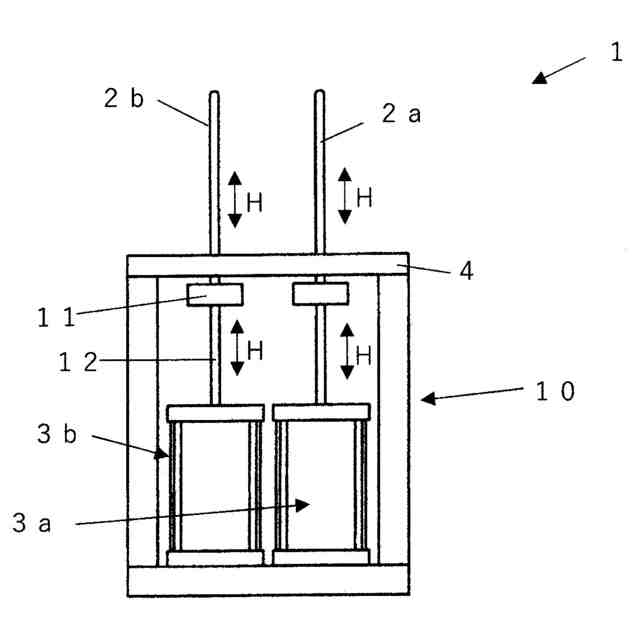
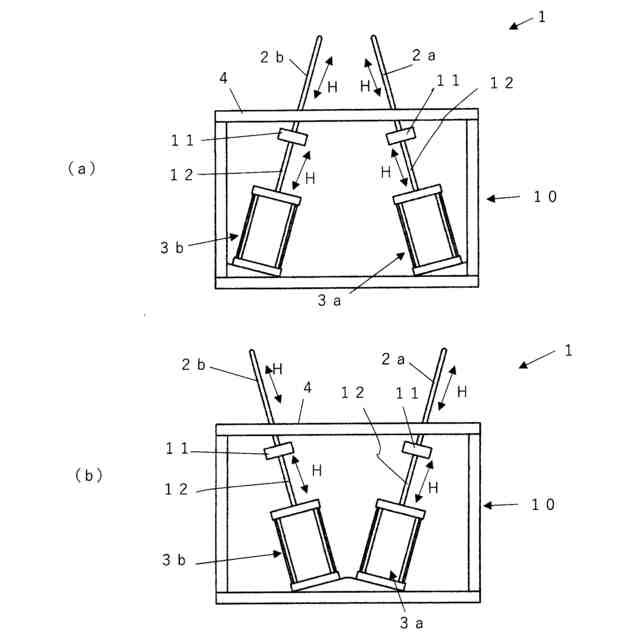
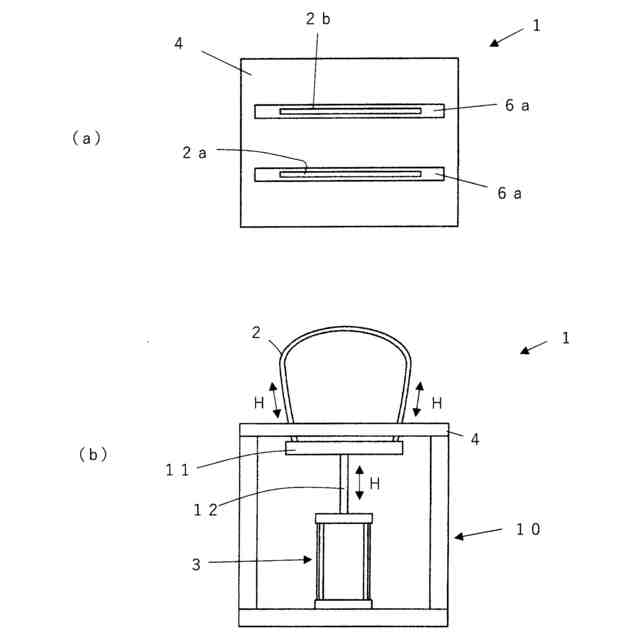
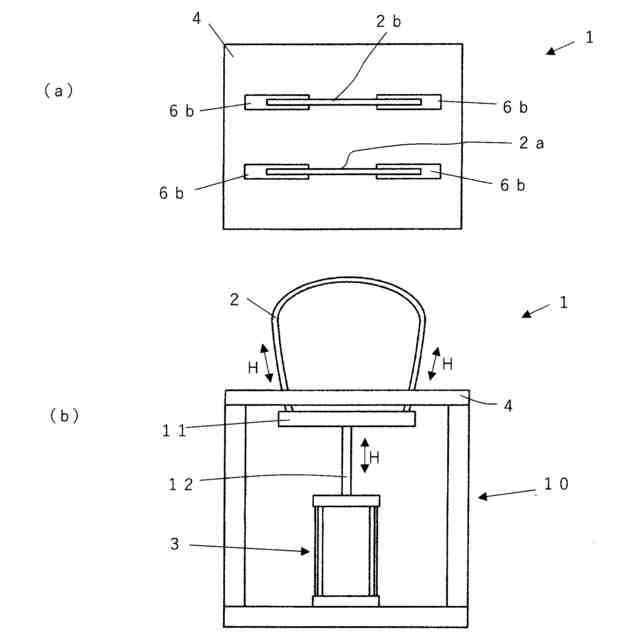
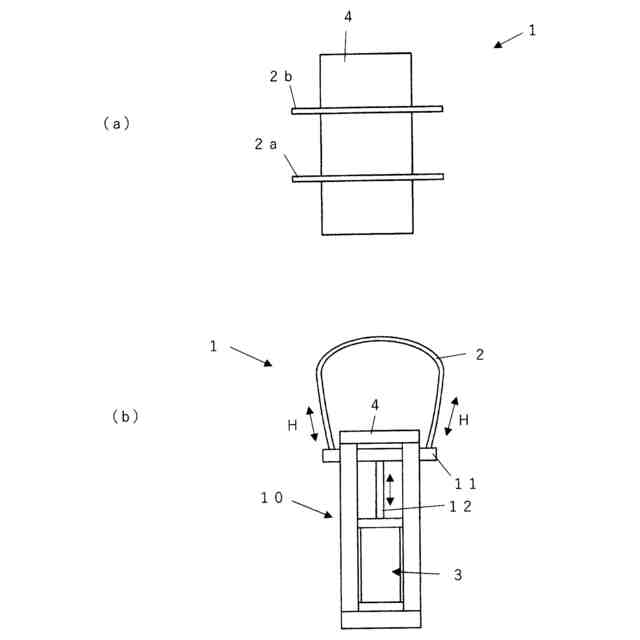
【解決手段】固体対象物が押し当てられる面を形成した被押し当て部材と、緊張時に固体対象物を被押し当て部材に押し当てる少なくとも二本の半環状を形成する紐状の弛張部材と、弛張部材を弛張させる張力可変手段と、を備え、弛張部材は、固体対象物に当接させた緊張時には固体対象物の外周面形状に倣う可撓性と、弛緩時には固体対象物を通過可能な大きさの半環状の形状を保持できる十分な形状保持力とを有し、弛張部材を引張って緊張させて固体対象物を把持し弛張部材を緩めて固体対象物を解放する把持固定機構又は把持固定ロボットハンドにより解決ができた。
【選択図】 図1
特許請求の範囲
【請求項1】
固体対象物を把持し固定することができる把持固定機構であって、
前記把持固定機構は、前記固体対象物が押し当てられる面を形成した被押し当て部材と、
緊張時に前記固体対象物を前記被押し当て部材に押し当てる少なくとも二本の半環状を形成する紐状の弛張部材と、紐状の前記弛張部材を弛張させる張力可変手段と、を備え、
半環状で紐状の前記弛張部材は、前記固体対象物に当接させた緊張時には前記固体対象物の外周面形状に倣う可撓性と、弛緩時には前記固体対象物を通過可能な大きさの半環状の形状を保持できる十分な形状保持力とを有し、
少なくとも二本の半環状で紐状の前記弛張部材を、前記張力可変手段により前記固体対象物に引き寄せ、さらに前記固体対象物に当接させた状態で引張って前記弛張部材を緊張させることにより前記固体対象物を前記被押し当て部材に押し当てて把持して固定し、少なくとも二本の半環状で紐状の前記弛張部材を前記張力可変手段により前記固体対象物から弛緩させて離隔させることにより前記固体対象物を解放させることを特徴とする把持固定機構。
続きを表示(約 590 文字)
【請求項2】
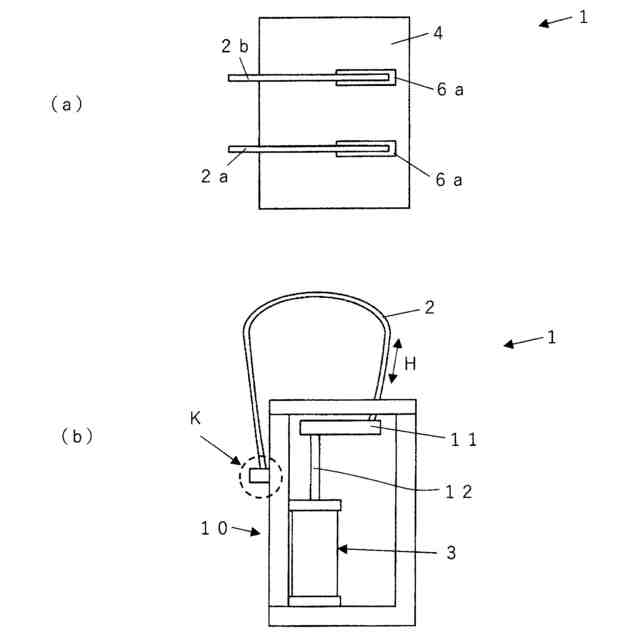
前記弛張部材の前記張力可変手段への取付形態が、前記弛張部材の半環状の両端部をともに前記張力可変手段に取付けた両端引張形態、又は、前記弛張部材の半環状の一端側を前記被押し当て部材と相対位置関係が不変な部位に固定し他端側を前記張力可変手段に取付けた片端引張形態があることを特徴とする請求項1に記載の把持固定機構。
【請求項3】
一つの紐状の前記弛張部材の半環状の端部の前記被押し当て部材に対する経路形態が、前記被押し当て部材に前記弛張部材ごとに設けられた一つの貫通穴を経路とする第一形態、前記被押し当て部材に前記弛張部材ごとに離隔して設けられた二つの貫通穴を経路とする第二形態、前記被押し当て部材の外方を経路とする第三形態、又は、前記第一形態と前記第三形態を組み合わせた経路とする第四形態であることを特徴とする請求項1又は2に記載の把持固定機構。
【請求項4】
紐状の前記弛張部材の半環状の内側空間に前記被押し当て部材が挿通状態でない場合に、前記弛張部材の半環状の内側空間を貫通させた弛張部材係止手段を前記被押し当て部材に設けたことを特徴とする請求項3に記載の把持固定機構。
【請求項5】
請求項1又は2に記載の把持固定機構に、ロボット本体の手首に脱着可能な脱着手段を設けたことを特徴とする把持固定ロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、表面形状が複雑な固体、表面形状が曲面で構成された固体、又は、表面形状が不定形な固体等の固体対象物を把持して固定化することができる把持固定機構、及び、把持固定ロボットハンドに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
対象物を把持するロボットハンドであって、前記対象物に少なくとも異なる二面で当接する当接手段と、前記対象物を前記二面と共に包囲するワイヤーと、前記ワイヤーを引っ張ることにより、前記対象物を前記二面へ押圧して固定すると共に、前記ワイヤーを緩めることにより、固定した前記対象物を解放する張力可変手段を備えたロボットハンドが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-43909号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のロボットハンドは、例えばベルトコンベア上で送られてくる、表面形状が複雑な固体、表面形状が曲面で構成された固体、又は、表面形状が不定形な固体等の固体対象物が、V字状の端部に衝突するため、把持し固定化することが困難であるという問題があった。
【0005】
また、対象物をV字状の二面に一本のワイヤーで押し当てて固定するため、固定した状態で前記対象物の端部に外力を加える追加工を加えると、前記一本のワイヤー部分がシーソーの支点部分のようになって前記対象物の追加工を加えられた側の反対側の端部が前記V字状の二面から浮き上がるので、ロボットハンドで前記対象物を固定化した状態での外力を加える追加工は困難になる場合があるという問題があった。
【0006】
本発明はこうした問題に鑑み創案されたもので、例えばベルトコンベアで送られてくる表面形状が複雑な固体、表面形状が曲面で構成された固体、又は、表面形状が不定形な固体等の固体対象物を把持して固定化することができ、例えば固定された前記固体対象物の端部に外力を加える追加工ができる把持固定機構、及び、把持固定ロボットハンドを提供することを課題とする。
【課題を解決するための手段】
【0007】
請求項1に記載の把持固定機構は、固体対象物を把持し固定することができる把持固定機構であって、前記把持固定機構は、前記固体対象物が押し当てられる面を形成した被押し当て部材と、緊張時に前記固体対象物を前記被押し当て部材に押し当てる少なくとも二本の半環状を形成する紐状の弛張部材と、紐状の前記弛張部材を弛張させる張力可変手段と、を備え、半環状で紐状の前記弛張部材は、前記固体対象物に当接させた緊張時には前記固体対象物の外周面形状に倣う可撓性と、弛緩時には前記固体対象物を通過可能な大きさの半環状の形状を保持できる十分な形状保持力とを有し、少なくとも二本の半環状で紐状の前記弛張部材を、前記張力可変手段により前記固体対象物に引き寄せ、さらに前記固体対象物に当接させた状態で引張って前記弛張部材を緊張させることにより前記固体対象物を前記被押し当て部材に押し当てて把持して固定し、少なくとも二本の半環状で紐状の前記弛張部材を前記張力可変手段により前記固体対象物から弛緩させて離隔させることにより前記固体対象物を解放させることを特徴とする。
【0008】
請求項2に記載の把持固定機構は、請求項1において、前記弛張部材の前記張力可変手段への取付形態が、前記弛張部材の半環状の両端部をともに前記張力可変手段に取付けた両端引張形態、又は、前記弛張部材の半環状の一端側を前記被押し当て部材と相対位置関係が不変な部位に固定し他端側を前記張力可変手段に取付けた片端引張形態があることを特徴とする。
【0009】
請求項3に記載の把持固定機構は、請求項1又は2において、一つの紐状の前記弛張部材の半環状の端部の前記被押し当て部材に対する経路形態が、前記被押し当て部材に前記弛張部材ごとに設けられた一つの貫通穴を経路とする第一形態、前記被押し当て部材に前記弛張部材ごとに離隔して設けられた二つの貫通穴を経路とする第二形態、前記被押し当て部材の外方を経路とする第三形態、又は、前記第一形態と前記第三形態を組み合わせた経路とする第四形態であることを特徴とする。
【0010】
請求項4に記載の把持固定機構は、請求項3において、紐状の前記弛張部材の半環状の内側空間に前記被押し当て部材が挿通状態でない場合に、前記弛張部材の半環状の内側空間を貫通させた弛張部材係止手段を前記被押し当て部材に設けたことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
広島県
樹脂組成物
5日前
広島県
把持固定機構、及び把持固定ロボットハンド
1か月前
ヤヱガキ醗酵技研株式会社
成熟卵母細胞の製造方法
8か月前
広島県
センサおよび金型
3か月前
広島県公立大学法人
コンクリート組成物及びコンクリート硬化体並びにコンクリート補強材
6か月前
国立研究開発法人農業・食品産業技術総合研究機構
新規飼料添加用乳酸菌
12か月前
広島県
推定装置、学習済みモデルの生成装置、教師データの生成装置、制御プログラム、推定方法、学習済みモデルの生成方法および教師データの生成方法
3か月前
キリンホールディングス株式会社
マツタケ原基およびその製造方法
5か月前
ノバセル株式会社
TVCMの効果を可視化するための装置、方法及びそのためのプログラム
10か月前
MiZ株式会社
微生物が産生する水素濃度の測定方法とキット
11か月前
個人
固定補助具
1か月前
個人
折りたたみ工具
29日前
株式会社三協システム
製函機
27日前
川崎重工業株式会社
ロボット
6日前
株式会社不二越
ロボット
5日前
株式会社三協システム
移載装置
26日前
CKD株式会社
把持装置
28日前
株式会社竹中工務店
補助セット
5日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社ミクロブ
把持装置
28日前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
29日前
SMC株式会社
着脱装置
27日前
株式会社不二越
移動ロボットシステム
8日前
ARMA株式会社
ジョイントフレーム
1か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
ロボットシステム
26日前
本田技研工業株式会社
装置
11日前
株式会社不二越
ロボットシステム
29日前
株式会社不二越
エッジ仕上げ装置
18日前
トヨタ自動車株式会社
歩行ロボット
1か月前
株式会社不二越
垂直多関節ロボット
19日前
アネックスツール株式会社
ドライバービット
4日前
ライオン株式会社
移載システム
20日前
シンフォニアテクノロジー株式会社
搬送装置
8日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ