TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132215
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029624
出願日
2024-02-29
発明の名称
ロボット
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/00 20060101AFI20250903BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モーターおよび減速機の放熱を効率よく行うことができるロボットを提供すること。
【解決手段】第1アームと、第2アームと、第1アームと第2アームとを回転軸回りに相対的に回転可能にし、かつ回転軸に沿って第1アームと第2アームとを互いに離間して接続する関節部と、を備え、関節部は、回転力を出力するモーターと、ケーシングを有し、モーターの回転速度を減速する遊星歯車式の減速機と、を有し、第1アームおよび第2アームの一方は、モーターおよびケーシングに接触して放熱を行う放熱部を有することを特徴とするロボット。
【選択図】図4
特許請求の範囲
【請求項1】
第1アームと、
第2アームと、
前記第1アームと前記第2アームとを回転軸回りに相対的に回転可能にし、かつ前記回転軸に沿って前記第1アームと前記第2アームとを互いに離間して接続する関節部と、を備え、
前記関節部は、
回転力を出力するモーターと、
ケーシングを有し、前記モーターの回転速度を減速する遊星歯車式の減速機と、を有し、
前記第1アームおよび前記第2アームの一方は、前記モーターおよび前記ケーシングに接触して放熱を行う放熱部を有することを特徴とするロボット。
続きを表示(約 450 文字)
【請求項2】
前記放熱部の一部は、前記モーターと前記ケーシングとの間に位置する請求項1に記載のロボット。
【請求項3】
前記放熱部の一部は、前記減速機のケーシングの外周部と接触する請求項2に記載のロボット。
【請求項4】
前記減速機の出力軸は、前記第1アームの先端部に固定され、
前記モーターは、前記第2アームに固定されている請求項1ないし3のいずれか1項に記載のロボット。
【請求項5】
前記放熱部は、前記第2アームに設けられている請求項1ないし3のいずれか1項に記載のロボット。
【請求項6】
前記第1アームは、前記第2アーム側に開放する凹部を有し、
前記減速機の少なくとも一部は、前記凹部内に設置され、
前記減速機の前記出力軸は、前記凹部の底部に固定されている請求項4に記載のロボット。
【請求項7】
前記減速機のケーシングの外周部は、前記凹部の内面と非接触である請求項6に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
複数のアームと、隣接するアーム同士を回転可能に接続する関節部とを備えるロボットアームを有し、このロボットアームを所望の姿勢となるように駆動してワークに対し作業を行うロボットが知られている。ロボットアームは、複数の関節部を有し、各関節部には、アームを回転駆動するための駆動部として、関節機構が設置されている。関節機構は、駆動源であるモーターと、モーターの回転速度を減速する減速機と、を有する。
【0003】
このようなロボットアームの関節部における関節機構では、モーターの駆動により熱が発生するとともに、減速機の作動により熱が発生する。これにより、ロボットアームの駆動に際し、関節機構の温度が上昇する。
【先行技術文献】
【特許文献】
【0004】
特開平9-323286号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のロボットでは、関節機構の放熱性が悪く、モーターおよび減速機の温度が上昇し、場合によっては、適正運転温度または許容温度を超えてしまい、さらにはこの状態が長時間継続してしまうことがある。従来では、関節機構の放熱、特に減速機の放熱に関して、何ら工夫がなされていなかった。
【課題を解決するための手段】
【0006】
本発明のロボットは、第1アームと、
第2アームと、
前記第1アームと前記第2アームとを回転軸回りに相対的に回転可能にし、かつ前記回転軸に沿って前記第1アームと前記第2アームとを互いに離間して接続する関節部と、を備え、
前記関節部は、
回転力を出力するモーターと、
ケーシングを有し、前記モーターの回転速度を減速する遊星歯車式の減速機と、を有し、
前記第1アームおよび前記第2アームの一方は、前記モーターおよび前記ケーシングに接触して放熱を行う放熱部を有する。
【図面の簡単な説明】
【0007】
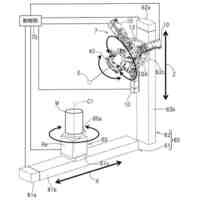
本発明の第1実施形態に係るロボットを備えるロボットシステムの概略構成図である。
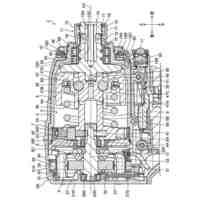
図4中のA―A線断面図である。
図2に示す第2減速機の内部構造を示す斜視図である。
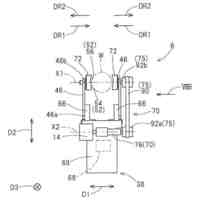
図1に示すロボットが備える第2関節部およびその周辺の部分断面側面図である。
本発明の第2実施形態に係るロボットが備える第2減速機の内部構造を示す斜視図である。
本発明の第3実施形態に係るロボットが備える第2関節部およびその周辺の部分断面側面図である。
本発明の第4実施形態に係るロボットが備える第2関節部およびその周辺の部分断面側面図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットを添付図面に示す実施形態に基づいて詳細に説明する。
<第1実施形態>
図1は、本発明の第1実施形態に係るロボットを備えるロボットシステムの概略構成図である。図2は、図1に示すロボットが備える第2減速機の横断面図であって、図4中のA―A線断面図である。図3は、図2に示す第2減速機の内部構造を示す斜視図である。図4は、図1に示すロボットが備える第2関節部およびその周辺の部分断面側面図である。
【0009】
なお、図1、図3および図4中の上下方向は、鉛直方向と一致しており、図1、図3および図4中の上側を「上」、下側を「下」とも言う。このことに関しては、図7についても同様である。ロボットアーム72、第1アーム73および第2アーム74については、図1中の右側を「基端部」、左側を「先端部」と言う。
【0010】
また、本明細書において、「鉛直」とは、鉛直と一致している場合のみならず、鉛直に対して若干、例えば±10°以内傾斜している場合も含む意味である。また、「水平」とは、水平と一致している場合のみならず、水平に対して若干、例えば±10°以内傾斜している場合も含む意味である。また、「平行」とは、2つの対象が平行と一致している場合のみならず、平行から若干、例えば±10°以内傾斜している場合も含む意味である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
14日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
23日前
株式会社マキタ
ハンマドリル
23日前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
1か月前
本田技研工業株式会社
装置
1か月前
株式会社安川電機
ロボット
20日前
川崎重工業株式会社
塗装システム
1か月前
株式会社三共コーポレーション
工具保持具
14日前
トヨタ自動車株式会社
軌道生成装置
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
20日前
アネックスツール株式会社
ドライバービット
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
回転打撃工具
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
現場用作業機
29日前
セイコーエプソン株式会社
ロボット
1か月前
NTN株式会社
ハンド
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
山九株式会社
レンチ保持治具
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2か月前
株式会社マキタ
電動工具
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
12日前
NTN株式会社
作業装置
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
26日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ