TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025144731
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044562
出願日
2024-03-21
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
19/00 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】カバーの振動に起因する騒音の発生を抑制する。
【解決手段】ロボット1は、マニピュレータ10の本体3と、本体3の開口31に取り外し可能に固定されるカバー4であって、開口の縁に対し圧入により固定される圧入部(周縁部41)を有するカバー4と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
マニピュレータの本体と、
前記本体の開口に取り外し可能に固定されるカバーであって、前記開口の縁に対し圧入により固定される圧入部を有するカバーと、
を備えた、ロボット。
続きを表示(約 910 文字)
【請求項2】
請求項1に記載のロボットにおいて、
前記圧入部は、前記カバーの周縁部の少なくとも一部である、ロボット。
【請求項3】
請求項2に記載のロボットにおいて、
前記カバーは、長手方向に離れた二箇所の周縁部と、短手方向に離れた二箇所の周縁部とを有し、
前記カバーの長手方向に離れた二箇所の周縁部が、圧入部である、ロボット。
【請求項4】
請求項1~3のいずれか1項に記載のロボットにおいて、
前記カバーの周縁部を前記本体に固定する、少なくとも一本のボルトをさらに備えた、ロボット。
【請求項5】
請求項1に記載のロボットにおいて、
前記カバーは、前記カバーを前記本体から取り外すために用いられる抜きタップをさらに有する、ロボット。
【請求項6】
請求項5に記載のロボットにおいて、
前記抜きタップは、前記カバーにおける第1周縁部に位置する第1抜きタップと、前記第1周縁部に対し前記カバーの中央部を挟んだ逆側の第2周縁部に位置する第2抜きタップと、を少なくとも含む、ロボット。
【請求項7】
請求項6に記載のロボットにおいて、
前記第1抜きタップと前記第2抜きタップとは、前記カバーの長手方向に離れている、ロボット。
【請求項8】
請求項1に記載のロボットにおいて、
前記カバーは、前記カバーの取外し用取っ手が固定される取っ手固定部を有する、ロボット。
【請求項9】
請求項8に記載のロボットにおいて、
前記取っ手は、前記カバーに、取り外し可能に固定され、
前記取っ手は、メンテナンス時に前記カバーに固定され、非メンテナンス時に前記カバーから取り外される、ロボット。
【請求項10】
請求項8又は9に記載のロボットにおいて、
前記取っ手固定部は、前記取っ手の取付ボルトが螺合するボルト孔であり、
前記ボルト孔は、前記カバーの内外を貫通しない、ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、ロボットに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、従来のロボットが記載されている。ロボットの第1アームは、筐体と、筐体に固定されるカバーとを備える。カバーの周縁部は、筐体に対し、複数のボルトによって固定される。第1アームは、内部に収容空間を有する。収容空間には、第1アームに対して第2アームを回転させる駆動機構が収容される。筐体は、収容空間の内部に、カバーと当接しかつカバーを押圧するリブを有する。特許文献1には、リブがカバーを振動し難くすることにより騒音の発生が抑制される、と記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-124103号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記従来のロボットの構造は、リブがカバーの中央部付近を押圧するだけであるため、カバーの振動はそれほど抑制されず、騒音の低減効果は高くない。
【課題を解決するための手段】
【0005】
ここに開示する技術は、ロボットに係る。ロボットは、
マニピュレータの本体と、
前記本体の開口に取り外し可能に固定されるカバーであって、前記開口の縁に対し圧入により固定される圧入部を有するカバーと、
を備える。
【発明の効果】
【0006】
前記のロボットでは、カバーが本体に対して強固に固定されるため、カバーの振動が抑制される。カバーの振動に起因する騒音の発生が抑制される。
【図面の簡単な説明】
【0007】
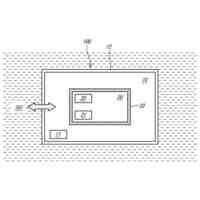
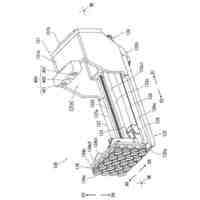
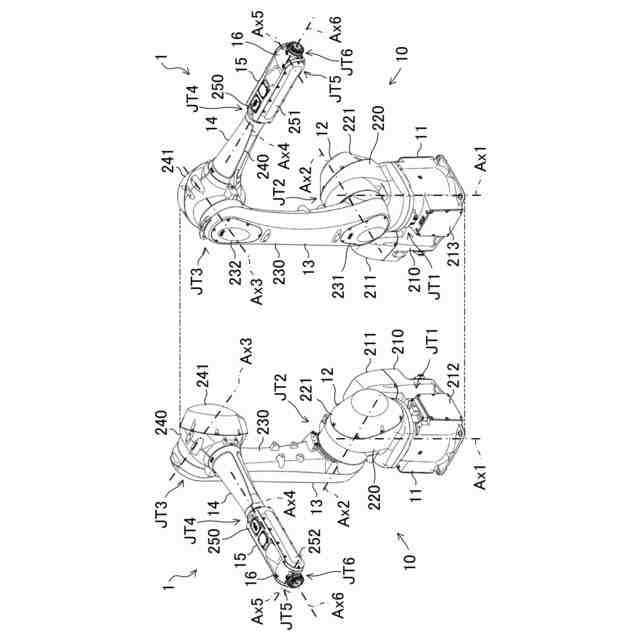
図1は、ロボットを示す。
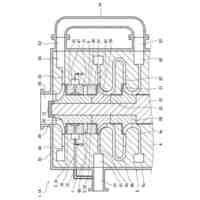
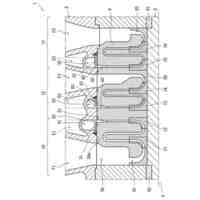
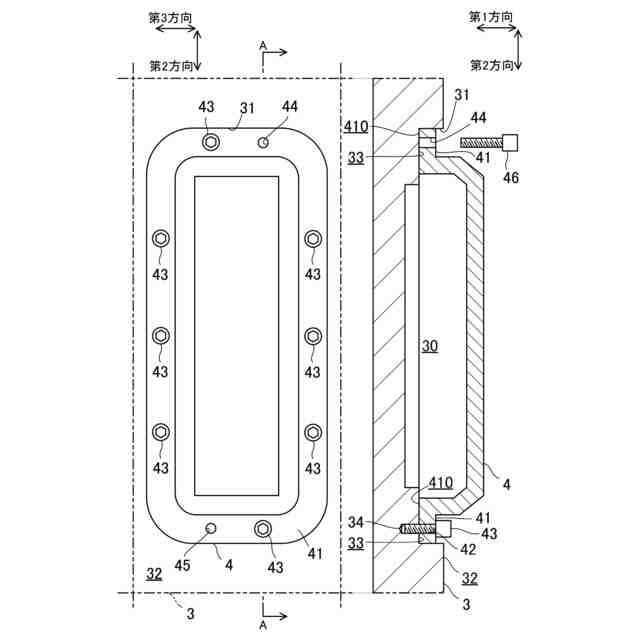
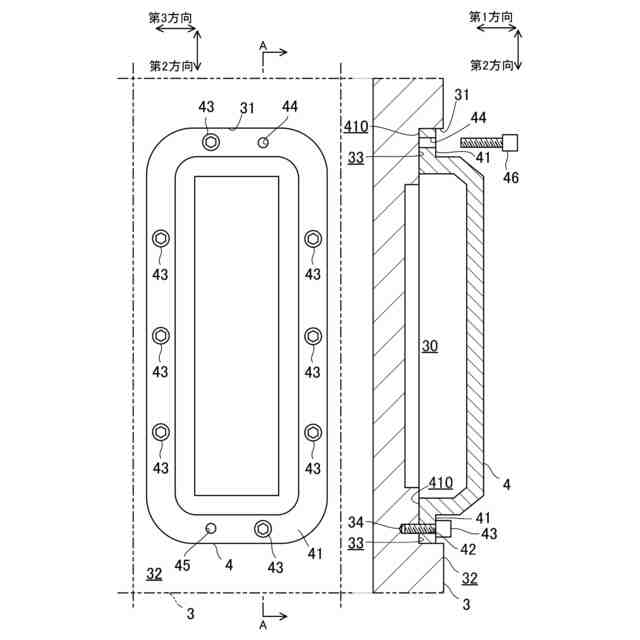
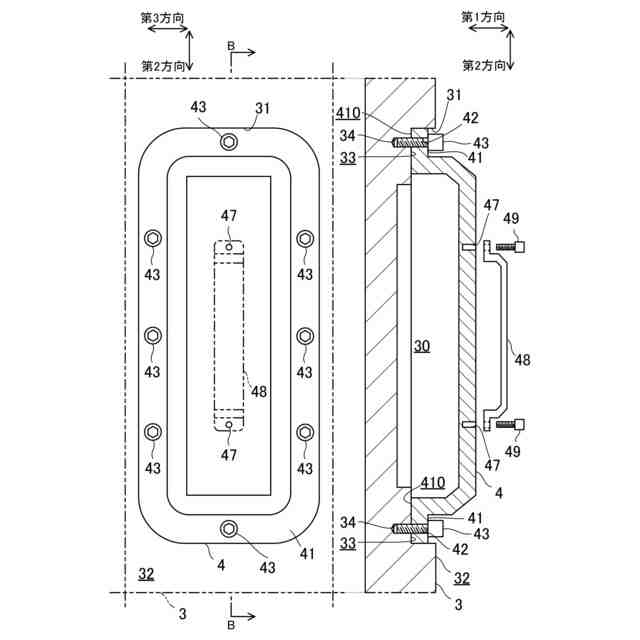
図2の左図は、本体に対して固定されたカバーを示し、右図は、左図のA-A断面図である。
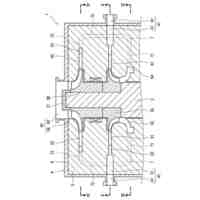
図3は変形例に係り、左図は、本体に対して固定されたカバーを示し、右図は、左図のB-B断面図である。
【発明を実施するための形態】
【0008】
以下、ロボットの実施形態について、図面を参照しながら説明する。ここで説明するロボットは例示である。
【0009】
(ロボットの全体構造)
図1は、ここに開示する技術が適用されるロボット1を示す。図1の右図は、ロボット1をロボット1の左方向から見た斜視図であり、図1の左図は、同じロボット1をロボット1の右方向から見た斜視図である。ロボット1は、マニピュレータ10を備える。マニピュレータ10は、ロボット1の機構である。図1のマニピュレータ10は、シリアルリンク構造である。図1のロボット1は、具体的には、6軸の垂直多関節ロボットである。マニピュレータ10は、アームを有する。ロボット1は、例えば工場において製品の製造に用いられる産業用ロボットである。ロボット1の用途は、製造用途に限定されない。
【0010】
ロボット1は、ベース11を備える。ベース11は、床面に固定される、又は、移動機構に載せられる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
水中構造体
23日前
川崎重工業株式会社
遠心式ターボ機械
22日前
川崎重工業株式会社
多段遠心ターボ機械
28日前
川崎重工業株式会社
バーナおよび燃焼器
23日前
川崎重工業株式会社
ダイクッション装置
22日前
川崎重工業株式会社
多段ラジアルタービン
14日前
川崎重工業株式会社
ガスタービンエンジン
24日前
川崎重工業株式会社
航空機の電気機械システム
24日前
川崎重工業株式会社
付加製造方法及び付加製造装置
22日前
川崎重工業株式会社
クローズドインペラの製造方法
25日前
川崎重工業株式会社
付加製造方法及び付加製造装置
22日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
22日前
横浜ゴム株式会社
多層空洞音響材
14日前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
22日前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
24日前
川崎重工業株式会社
多段遠心圧縮機のケーシング、及び、多段遠心圧縮機
1日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
22日前
川崎重工業株式会社
二酸化炭素排出システム及び方法、並びに水中航走体
17日前
川崎重工業株式会社
レーダ反射断面積切換装置及びレーダ反射断面積切換方法
22日前
川崎重工業株式会社
ロボット
16日前
川崎重工業株式会社
学習済モデルの構築方法
21日前
川崎重工業株式会社
水素航空機の燃料供給システム
1か月前
横浜ゴム株式会社
水中音響材の被取り付け面への取り付け構造および水中音響材
14日前
株式会社Eサーモジェンテック
熱電発電システムの製造方法
14日前
川崎重工業株式会社
手術支援システム、手術支援システムの制御方法およびプログラム
7日前
横浜ゴム株式会社
水中音響材の被取り付け面への取り付け構造および水中構造体の被取り付け面を水中音響材で覆う構造ならびに水中音響材
14日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
16日前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
学習装置
1日前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
25日前
株式会社マキタ
ハンマドリル
25日前
トヨタ自動車株式会社
ロボット
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ