TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025170145
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2025153360,2021141034
出願日
2025-09-16,2021-08-31
発明の名称
手術支援システム、手術支援システムの制御方法およびプログラム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20251107BHJP(医学または獣医学;衛生学)
要約
【課題】ロボットアームの姿勢に対して効果的にスケーリングを行うことが可能な手術支援システムを提供する。
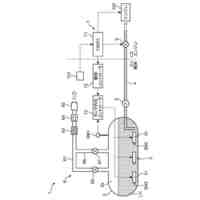
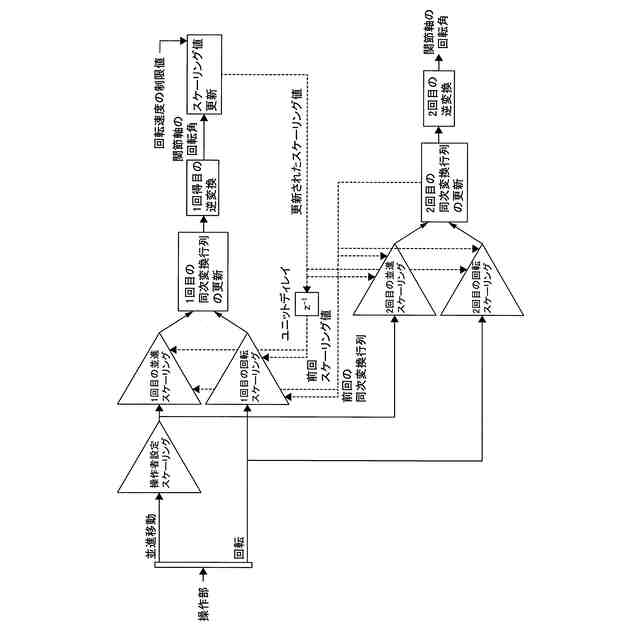
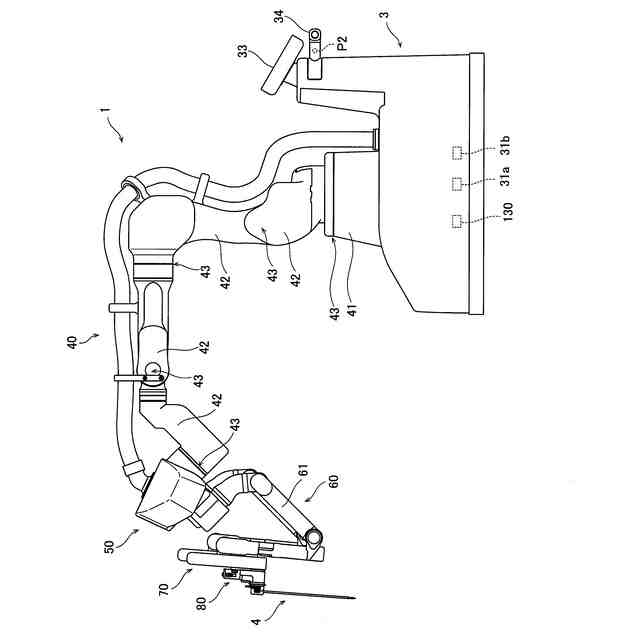
【解決手段】手術支援システム100では、制御装置130は、受け付けられた操作量のうち、手術器具4の並進移動成分および手術器具4の回転成分に対して、それぞれ、並進および回転スケーリングを行い、並進および回転スケーリングを行った後の並進移動成分および回転成分に対して逆運動学計算を行うことにより、ロボットアーム60および手術器具4の関節軸の回転角を算出する。
【選択図】図20
特許請求の範囲
【請求項1】
先端に手術器具が取り付けられるロボットアームを含む患者側装置と、
入力信号に基づいて前記手術器具の並進移動および回転を制御する制御装置と、を備え、
前記制御装置は、
前記入力信号のうち、前記手術器具の並進移動成分および回転成分のうちの少なくとも前記回転成分に対して、前回の制御周期で用いられた第1のスケーリング値を用いて、第1のスケーリングを行い、
前記第1のスケーリングを行った後の前記並進移動成分および前記回転成分に対して逆運動学計算を行うことにより、前記ロボットアームの関節軸の回転角を算出し、
前記ロボットアームの関節軸の回転速度が制限値よりも大きくなる場合、前記ロボットアームの関節軸の回転速度が制限値以下になるように、前記第1のスケーリング値を更新する、手術支援システム。
続きを表示(約 1,800 文字)
【請求項2】
前記制御装置は、
更新した前記第1のスケーリング値を用いて前記第1のスケーリングを行った後の前記並進移動成分および前記回転成分に対して逆運動学計算を行うことにより、前記ロボットアームの関節軸の回転速度が制限値以下になるように、前記ロボットアームの関節軸の回転角を算出する、請求項1に記載の手術支援システム。
【請求項3】
前記ロボットアームは、複数の関節軸を有し、
前記制御装置は、
前記複数の関節軸の回転角を算出し、
前記複数の関節軸の各々の前記回転角に基づいて前記複数の関節軸の各々の回転速度を算出し、
前記複数の関節軸の各々の前記回転速度のうちの最大の前記回転速度が制限値以上の場合、前記第1のスケーリング値が小さくなるとともに、前記ロボットアームの関節軸の回転速度が制限値以下になるように前記第1のスケーリング値を変更する、請求項2に記載の手術支援システム。
【請求項4】
前記制御装置は、前記複数の関節軸の各々の前記回転速度のうちの最大の前記回転速度が制限値以上の場合、前回の制御周期で用いられた前記第1のスケーリング値を、算出した前記複数の関節軸の各々の前記回転速度の各軸の制限値に対する比の絶対値のうち最大値で除算した値を、変更後の前記第1のスケーリング値とすることにより前記第1のスケーリング値を小さくする、請求項3に記載の手術支援システム。
【請求項5】
前記制御装置は、
前記複数の関節軸の各々の前記回転速度のうちの最大の前記回転速度が制限値よりも小さい場合、前記第1のスケーリング値が大きくなるように前記第1のスケーリング値を変更する、請求項3または4に記載の手術支援システム。
【請求項6】
前記制御装置は、前記複数の関節軸の各々の前記回転速度のうちの最大の前記回転速度が制限値よりも小さい場合、算出した前記複数の関節軸の各々の前記回転速度の各軸の制限値に対する比の絶対値のうち最大値の逆数と、予め設定された1よりも大きい所定の値とのうちの小さい方に、前回の制御周期で用いられた前記第1のスケーリング値を乗算した値を、変更後の前記第1のスケーリング値とする、請求項5に記載の手術支援システム。
【請求項7】
前記制御装置は、前記第1のスケーリング値に基づいて、前回の制御周期で用いられた前記並進移動成分と、前記入力信号に対応する前記並進移動成分とを線形補間することにより、今回の制御周期で使用する前記並進移動成分を算出する、請求項2~6のいずれか1項に記載の手術支援システム。
【請求項8】
前記制御装置は、前記第1のスケーリング値に基づいて、前回の制御周期で用いられた前記回転成分と、前記入力信号に対応する前記回転成分とを、球面上に沿って補間する球面線形補間することにより、今回の制御周期で使用する前記回転成分を算出する、請求項2~7のいずれか1項に記載の手術支援システム。
【請求項9】
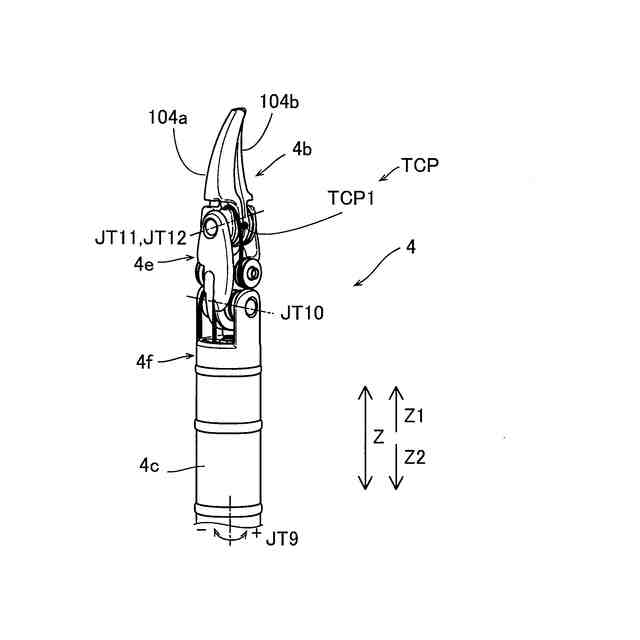
前記手術器具は、
シャフトと、
前記シャフトの遠位端側に設けられるジョーを曲げる手首関節と、を含み、
前記制御装置は、前記シャフトのロール回転軸と前記手首関節の回転軸を含む前記手術器具の複数の関節軸の少なくとも前記回転成分に対して前記第1のスケーリングを行い、
前記第1のスケーリングを行った後の前記並進移動成分および前記回転成分に対して逆運動学計算を行うことにより、前記手術器具の関節軸の回転角を算出し、
前記手術器具の関節軸の回転速度が制限値以下になるように、前記第1のスケーリング値を更新し、
更新した前記第1のスケーリング値を用いて前記第1のスケーリングを行った後の前記並進移動成分および前記回転成分に対して逆運動学計算を行うことにより、前記手術器具の関節軸の回転角を算出する、請求項2~8のいずれか1項に記載の手術支援システム。
【請求項10】
前記制御装置は、前記手術器具のシャフトが延びる方向に沿った直線と鉛直方向に沿った直線とが交差する点である所定の点周りに前記手術器具が回転するように移動する際に、前記第1のスケーリングを行う、請求項2~9のいずれか1項に記載の手術支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術支援システム、手術支援システムの制御方法およびプログラムに関し、特に、操作者による操作を受け付ける操作部を含む手術支援システム、手術支援システムの制御方法およびプログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、操作者による操作を受け付けるマスターハンドルを含む手術支援システムが知られている。特許文献1では、外科医がマスターハンドルを移動させることにより、ロボットアームに取り付けられたエンドエフェクタが移動する。特許文献1では、外科医がマスターハンドルを移動させる移動量よりも、エンドエフェクタの移動量が小さくなるように、スケーリングが行われている。具体的には、外科医がマスターハンドルを移動させると、制御装置は、移動後のマスターハンドルの位置と移動前のマスターハンドルの位置との差分値を算出する。そして、制御装置は、算出した差分値にスケール係数を乗算する。スケール係数は、1よりも小さい。制御装置は、スケール係数が乗算された差分値に基づいて、エンドエフェクタを移動する。スケール係数が1よりも小さいため、外科医のマスターハンドルの移動量よりもエンドエフェクタの移動量が小さくなる。
【先行技術文献】
【特許文献】
【0003】
米国特許第6994703号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、特許文献1のような従来の手術支援システムでは、外科医がマスターハンドルを移動させると、制御装置は、マスターハンドルによって受け付けられた操作量のうちの、エンドエフェクタの並進移動のための並進移動成分およびエンドエフェクタの回転のための回転成分を逆運動学計算することにより、ロボットアームの関節軸の回転角を算出する。特許文献1では、移動の前後のマスターハンドルの位置の差分値にスケール係数を乗算することによりスケーリングが行われている。ここで、位置の変化は、並進的な移動であるため、エンドエフェクタの並進移動成分にのみスケーリングが行われている。ここで、ロボットアームの姿勢によっては、エンドエフェクタの先端の移動が比較的小さい場合でも、ロボットアームの姿勢が大きく変化する場合がある。このような場合に、特許文献1のように並進移動にのみスケーリングを行うと、ロボットアームの姿勢に対して効果的にスケーリングが行われないという問題点が考えられる。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットアームの姿勢に対して効果的にスケーリングを行うことが可能な手術支援システム、手術支援システムの制御方法およびプログラムを提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、この開示の第1の局面による手術支援システムは、先端に手術器具が取り付けられるロボットアームを含む患者側装置と、入力信号に基づいて手術器具の並進移動および回転を制御する制御装置と、を備え、制御装置は、入力信号のうち、手術器具の並進移動成分および回転成分のうちの少なくとも回転成分に対して、前回の制御周期で用いられた第1のスケーリング値を用いて、第1のスケーリングを行い、第1のスケーリングを行った後の並進移動成分および回転成分に対して逆運動学計算を行うことにより、ロボットアームの関節軸の回転角を算出し、ロボットアームの関節軸の回転速度が制限値よりも大きくなる場合、ロボットアームの関節軸の回転速度が制限値以下になるように、第1のスケーリング値を更新する。
【0007】
この開示の第1の局面による手術支援ロボットでは、上記のように、制御装置は、受け付けられた操作量のうち、手術器具の並進移動成分および手術器具の回転成分のうちの少なくとも回転成分に対して第1のスケーリングを行い、第1のスケーリングを行った後の並進移動成分および回転成分に対して逆運動学計算を行うことにより、ロボットアームの関節軸の回転角を算出する。ロボットアームの姿勢には回転成分が大きく寄与するので、少なくとも回転成分に対して第1のスケーリングを行うことにより、ロボットアームの姿勢に対して効果的にスケーリングを行うことができる。
【0008】
この開示の第2の局面による手術支援システムの制御方法は、先端に手術器具が取り付けられるロボットアームを含む患者側装置と、入力信号に基づいて手術器具の並進移動および回転を制御する制御装置と、を備える手術支援システムの制御方法であって、制御装置が、入力信号のうち、手術器具の並進移動成分および回転成分のうちの少なくとも回転成分に対して、前回の制御周期で用いられたスケーリング値を用いて、スケーリングを行い、制御装置が、スケーリングを行った後の並進移動成分および回転成分に対して逆運動学計算を行うことにより、ロボットアームおよび手術器具の関節軸の回転角を算出し、制御装置が、ロボットアームの関節軸の回転速度が制限値よりも大きくなる場合、ロボットアームの関節軸の回転速度が制限値以下になるように、スケーリング値を更新する。
【0009】
この開示の第2の局面による手術支援システムの制御方法は、上記のように、受け付けられた操作量のうち、手術器具の並進移動成分および手術器具の回転成分のうちの少なくとも回転成分に対してスケーリングを行う。ロボットアームの姿勢には回転成分が大きく寄与するので、少なくとも回転成分に対してのスケーリングを行うことにより、ロボットアームの姿勢に対して効果的にスケーリングを行うことが可能な手術支援システムの制御方法を提供できる。
この開示の第3の局面によるプログラムは、先端に手術器具が取り付けられるロボットアームを含む患者側装置と、入力信号に基づいて手術器具の並進移動および回転を制御する制御装置と、を備える手術支援システムの制御方法を実行するプログラムであって、制御装置が、入力信号のうち、手術器具の並進移動成分および回転成分のうちの少なくとも回転成分に対して、前回の制御周期で用いられたスケーリング値を用いて、スケーリングを行い、制御装置が、スケーリングを行った後の並進移動成分および回転成分に対して逆運動学計算を行うことにより、ロボットアームおよび手術器具の関節軸の回転角を算出し、制御装置が、ロボットアームの関節軸の回転速度が制限値よりも大きくなる場合、ロボットアームの関節軸の回転速度が制限値以下になるように、スケーリング値を更新する、手術支援システムの制御方法を実行する。
【発明の効果】
【0010】
本開示によれば、ロボットアームの姿勢に対して効果的にスケーリングを行うことできる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
水中構造体
22日前
川崎重工業株式会社
遠心式ターボ機械
21日前
川崎重工業株式会社
多段遠心ターボ機械
27日前
川崎重工業株式会社
バーナおよび燃焼器
22日前
川崎重工業株式会社
ダイクッション装置
21日前
川崎重工業株式会社
多段ラジアルタービン
13日前
川崎重工業株式会社
ガスタービンエンジン
23日前
川崎重工業株式会社
航空機の電気機械システム
23日前
川崎重工業株式会社
付加製造方法及び付加製造装置
21日前
川崎重工業株式会社
クローズドインペラの製造方法
24日前
川崎重工業株式会社
付加製造方法及び付加製造装置
21日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
21日前
横浜ゴム株式会社
多層空洞音響材
13日前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
21日前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
23日前
川崎重工業株式会社
多段遠心圧縮機のケーシング、及び、多段遠心圧縮機
今日
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
川崎重工業株式会社
二酸化炭素排出システム及び方法、並びに水中航走体
16日前
川崎重工業株式会社
レーダ反射断面積切換装置及びレーダ反射断面積切換方法
21日前
川崎重工業株式会社
ロボット
15日前
川崎重工業株式会社
学習済モデルの構築方法
20日前
川崎重工業株式会社
水素航空機の燃料供給システム
29日前
横浜ゴム株式会社
水中音響材の被取り付け面への取り付け構造および水中音響材
13日前
株式会社Eサーモジェンテック
熱電発電システムの製造方法
13日前
川崎重工業株式会社
手術支援システム、手術支援システムの制御方法およびプログラム
6日前
横浜ゴム株式会社
水中音響材の被取り付け面への取り付け構造および水中構造体の被取り付け面を水中音響材で覆う構造ならびに水中音響材
13日前
個人
貼付剤
24日前
個人
簡易担架
6日前
個人
短下肢装具
4か月前
個人
腋臭防止剤
6日前
個人
足踏み器具
13日前
個人
嚥下鍛錬装置
4か月前
個人
排尿補助器具
1か月前
個人
白内障治療法
8か月前
個人
前腕誘導装置
4か月前
個人
洗井間専家。
7か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ