TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025162916
公報種別
公開特許公報(A)
公開日
2025-10-28
出願番号
2024066419
出願日
2024-04-16
発明の名称
廃棄物処理システムおよび廃棄物用振動装置
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B65G
47/90 20060101AFI20251021BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】廃棄物を効率良く仕分けることが可能であるとともに、廃棄物の資源化も可能な廃棄物処理システムおよび廃棄物用振動装置を提供する。
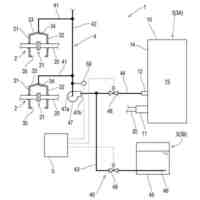
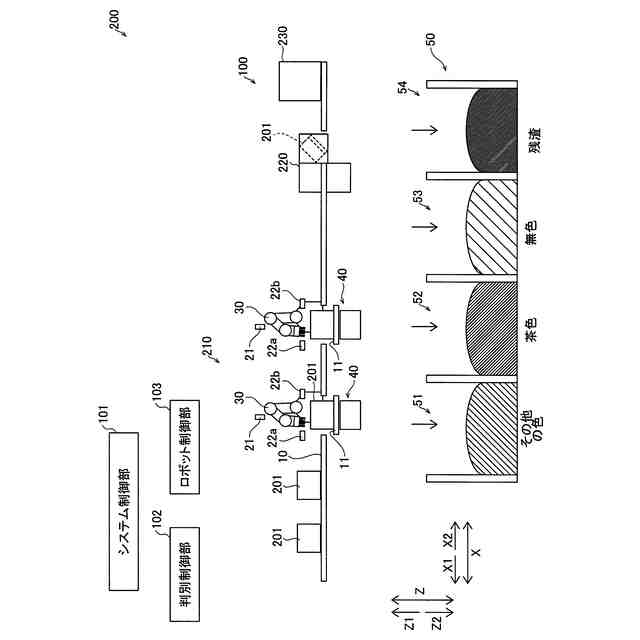
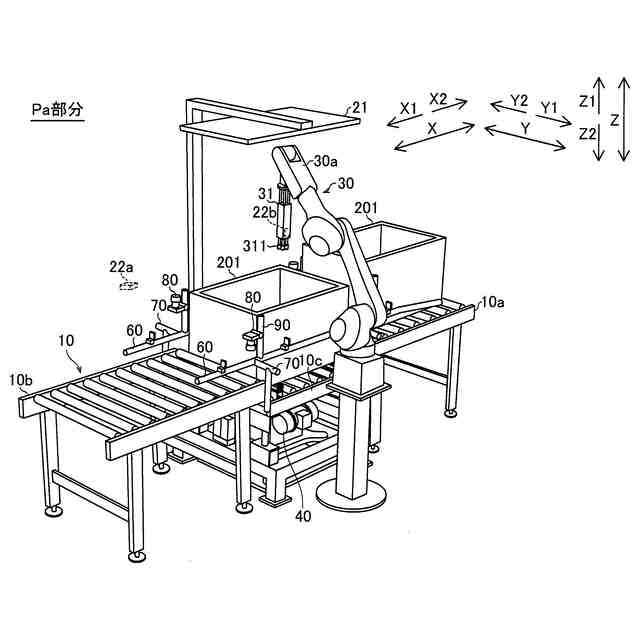
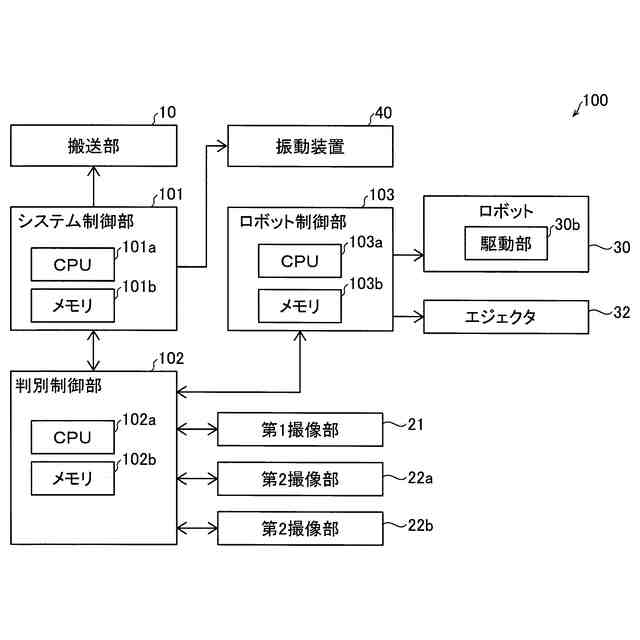
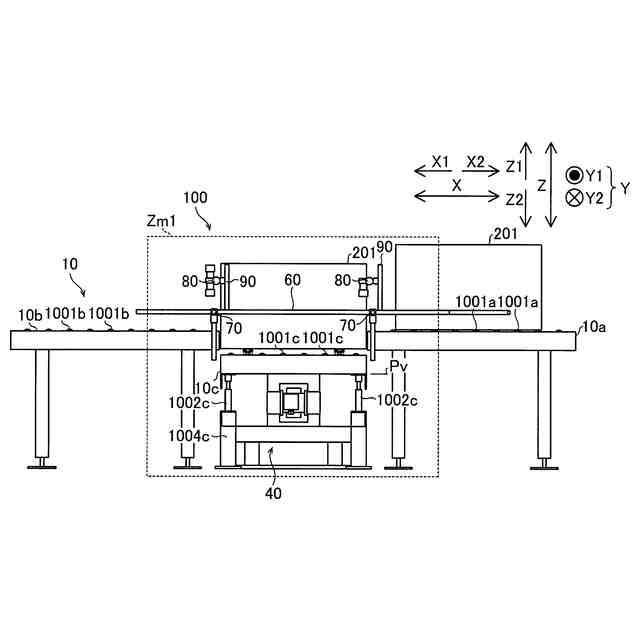
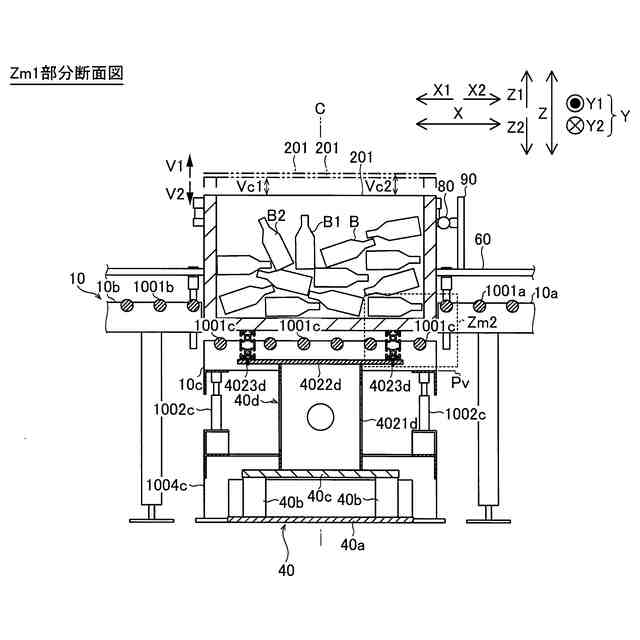
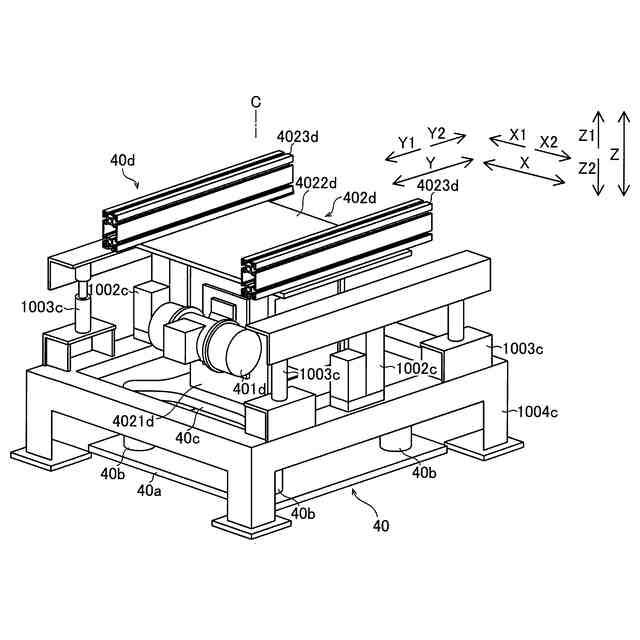
【解決手段】この廃棄物処理システム100は、複数種類の廃棄物Bが収容されたコンテナ201を搬送する搬送部10と、コンテナ201内の廃棄物Bを保持して仕分けるロボット30と、ロボット30によって仕分けられる仕分け位置Pvに搬送部10により搬送したコンテナ201を振動させる振動部40dを含むコンテナ振動装置40とを備える。
【選択図】図6
特許請求の範囲
【請求項1】
複数種類の廃棄物が収容されたコンテナを搬送する搬送部と、
前記コンテナ内の前記廃棄物を保持して仕分けるロボットと、
前記ロボットによって仕分けられる仕分け位置に前記搬送部により搬送した前記コンテナを振動させる振動部を含むコンテナ振動装置とを備える、廃棄物処理システム。
続きを表示(約 1,000 文字)
【請求項2】
前記振動部は、前記コンテナを上下方向に振動させるように構成されている、請求項1に記載の廃棄物処理システム。
【請求項3】
前記振動部は、前記コンテナを固定せずに、前記コンテナを振動させるように構成されている、請求項1に記載の廃棄物処理システム。
【請求項4】
前記ロボットにより前記廃棄物の保持に失敗したことに基づいて、前記振動部を用いて前記コンテナを振動させる制御を行う制御部をさらに備える、請求項1に記載の廃棄物処理システム。
【請求項5】
前記制御部は、前記ロボットによる前記廃棄物の保持を連続して失敗したことに基づいて、前記コンテナを振動させる制御を行う、請求項4に記載の廃棄物処理システム。
【請求項6】
前記振動部は、複数の振動モータを含み、
前記振動部は、前記複数の振動モータの各々を互いに逆方向に同期して回転させて上下方向に沿った力以外を打ち消すことによって発生する上下方向に沿った力である加振力により前記コンテナを上下方向に振動させるように構成されている、請求項2に記載の廃棄物処理システム。
【請求項7】
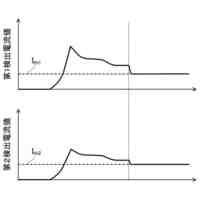
前記加振力は、前記複数の振動モータの各々において生じる遠心力に基づく振動力を示す指標値である振動力設定値と、前記複数の振動モータの各々に供給される電力の周波数とに基づいて調整される、請求項6に記載の廃棄物処理システム。
【請求項8】
前記複数の振動モータは、短周期の電力の前記周波数に基づく前記加振力により前記コンテナを上下方向に振動させるように構成されている、請求項7に記載の廃棄物処理システム。
【請求項9】
前記振動部は、過渡振動および定常振動の少なくともいずれかにより前記コンテナを振動させて前記コンテナ内の前記廃棄物の姿勢を変更させるように駆動する振動モータを含む、請求項1に記載の廃棄物処理システム。
【請求項10】
前記搬送部は、
前記コンテナが載置される載置部と、
前記搬送部により搬送された前記コンテナの搬送位置と、前記搬送位置の下方における前記振動部により前記コンテナを振動させる前記仕分け位置としての振動位置とに、前記載置部を昇降させる昇降部を含む、請求項1に記載の廃棄物処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、廃棄物処理システムおよび廃棄物用振動装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、廃棄物処理システムが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、廃ビン取出設備(廃棄物処理システム)が開示されている。
【0004】
上記特許文献1の廃ビン取出設備は、コンテナ搬入装置と、反転フレームと、反転駆動装置と、ビン搬送コンベヤとを備えている。コンテナ搬入装置は、廃ビン(廃棄物)が収容されたコンテナを反転フレームによりコンテナを保持する保持位置まで搬入するように構成されている。反転フレームは、保持位置のコンテナを保持するように構成されている。反転駆動装置は、反転フレームにより保持されたコンテナを反転させて、ビン搬送コンベヤ上にコンテナ内の廃ビンを排出するように構成されている。ビン搬送コンベヤは、排出された廃ビンを分別位置まで搬送するように構成されている。
【先行技術文献】
【特許文献】
【0005】
特開2001-48354号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1の廃ビン取出設備では、コンテナ内の廃ビンを排出する際に、反転フレームにより保持されたコンテナを反転させることにより、コンテナ内の廃ビンが、ビン搬送コンベヤ上に落とされて排出されている。したがって、上記特許文献1の廃ビン取出設備では、コンテナを反転させてコンテナ内の廃ビンを排出することに起因して、ビン搬送コンベヤ上に落とした際の衝撃により廃ビンが割れてしまう場合がある。この場合、排出した後の廃ビン(廃棄物)が割れていると分別位置において廃ビンを効率良く仕分けできず廃ビン(廃棄物)の資源化も出来ないという問題点がある。
【0007】
上記のような課題を解決するためになされたものであり、廃棄物を効率良く仕分けることが可能であるとともに、廃棄物の資源化も可能な廃棄物処理システムおよび廃棄物用振動装置を提供することである。
【課題を解決するための手段】
【0008】
第1の局面による廃棄物処理システムは、複数種類の廃棄物が収容されたコンテナを搬送する搬送部と、コンテナ内の廃棄物を保持して仕分けるロボットと、ロボットによって仕分けられる仕分け位置に搬送部により搬送したコンテナを振動させる振動部を含むコンテナ振動装置とを備える。
【0009】
第1の局面による廃棄物処理システムでは、上記のように、複数種類の廃棄物が収容されたコンテナを搬送する搬送部と、コンテナ内の廃棄物を保持して仕分けるロボットを設ける。これにより、廃棄物が収容されたコンテナから廃棄物を直接取り出して仕分けることができるので、コンベアに廃棄物を投入してからコンベア上の廃棄物を仕分ける場合と異なり、投入に起因する衝撃が廃棄物に加わるのを抑制することができる。したがって、廃棄物が割れるのを抑制することができるので、廃棄物の割れに起因して廃棄物が仕分けにくくなるのを抑制することができる。その結果、廃棄物を効率良く仕分けることができるとともに、廃棄物の資源化もできる。また、ロボットにより廃棄物を割れの少ない状態で仕分けることができるので、回収率を向上させることができるとともに、資源化率を向上させることができる。また、ロボットによって仕分けられる仕分け位置に搬送部により搬送したコンテナを振動させる振動部を含むコンテナ振動装置を設ける。これにより、ロボットによりコンテナ内の廃棄物を保持する際に、廃棄物の姿勢がロボットにより保持できない姿勢である場合でも、振動部によりコンテナを振動させることによって廃棄物も振動するので、廃棄物の姿勢を変化させることができる。その結果、ロボットにより保持して仕分けることができない廃棄物を減らすことができるので、ロボットにより廃棄物をより効率良く仕分けることができる。
【0010】
第2の局面による廃棄物用振動装置は、複数種類の廃棄物が収容されたコンテナ内の廃棄物を保持して仕分けるロボットによって仕分けられる仕分け位置に搬送されたコンテナを振動させる振動部を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1か月前
川崎重工業株式会社
断熱配管
1か月前
川崎重工業株式会社
水中構造体
25日前
川崎重工業株式会社
塗装システム
1か月前
川崎重工業株式会社
監視システム
1か月前
川崎重工業株式会社
配管の支持構造
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
遠心式ターボ機械
24日前
川崎重工業株式会社
バーナおよび燃焼器
25日前
川崎重工業株式会社
多段遠心ターボ機械
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
ダイクッション装置
24日前
川崎重工業株式会社
極低温流体用配管設備
1か月前
川崎重工業株式会社
多段ラジアルタービン
16日前
川崎重工業株式会社
ガスタービンエンジン
26日前
川崎重工業株式会社
ロボットの診断システム
1か月前
川崎重工業株式会社
航空機の電気機械システム
26日前
株式会社キッツ
逆流防止弁
1か月前
川崎重工業株式会社
支援システムおよび支援方法
1か月前
川崎重工業株式会社
クローズドインペラの製造方法
27日前
川崎重工業株式会社
付加製造方法及び付加製造装置
24日前
川崎重工業株式会社
経路作成方法及び経路作成装置
1か月前
川崎重工業株式会社
付加製造方法及び付加製造装置
24日前
川崎重工業株式会社
アンモニア回収システム及び方法
1か月前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
24日前
川崎重工業株式会社
ロボットシステム及びその動作方法
1か月前
横浜ゴム株式会社
多層空洞音響材
16日前
川崎重工業株式会社
配管の接続構造および配管システム
1か月前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
24日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1か月前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1か月前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1か月前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1か月前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ