TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025164965
公報種別
公開特許公報(A)
公開日
2025-10-31
出願番号
2025130023,2021145070
出願日
2025-08-04,2021-09-06
発明の名称
学習済モデルの構築方法
出願人
川崎重工業株式会社
代理人
個人
主分類
G06N
20/00 20190101AFI20251024BHJP(計算;計数)
要約
【課題】高性能の学習済モデルを効率的に得る。
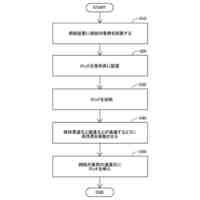
【解決手段】学習済モデルの構築方法は、6つの工程を含む。第1工程では、人間による制御対象機械の操作を機械学習するためのデータをコンピュータが収集する。第2工程では、前記収集されたデータである収集データを評価し、所定の評価基準を満たさない場合にコンピュータがデータを再収集する。第3工程では、評価基準を満たす前記収集データからコンピュータが訓練データを選別する。第4工程では、前記訓練データを評価し、所定の評価基準を満たさない場合にコンピュータが訓練データを再選別する。第5工程では、評価基準を満たす前記訓練データを用いた機械学習により、コンピュータが学習済モデルを構築する。第6工程では、前記学習済モデルを評価し、所定の評価基準を満たさない場合に、コンピュータが前記学習済モデルを再学習させる。
【選択図】図10
特許請求の範囲
【請求項1】
コンピュータが、人間による制御対象機械の操作を機械学習するためのデータを収集する第1工程と、
収集されたデータである収集データを第1評価基準に基づいて評価し、前記第1評価基準を満たさない場合にコンピュータがデータを再収集する第2工程と、
コンピュータが、前記第1評価基準を満たす前記収集データから訓練データを選別する第3工程と、
前記訓練データを第2評価基準に基づいて評価し、前記第2評価基準を満たさない場合にコンピュータが訓練データを再選別する第4工程と、
コンピュータが、前記第2評価基準を満たす前記訓練データを用いた機械学習により学習済モデルを構築する第5工程と、
前記学習済モデルを第3評価基準に基づいて評価し、前記第3評価基準を満たさない場合にコンピュータが前記学習済モデルを再学習させる第6工程と、
を含むことを特徴とする学習済モデルの構築方法。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の学習済モデルの構築方法であって、
前記第4工程において、前記訓練データが前記第2評価基準を満たさない場合であって、前記第2評価基準を満たさない原因が前記収集データにあるときは、前記第1工程又は第2工程に戻り、
前記第6工程において、前記学習済モデルが前記第3評価基準を満たさない場合であって、前記第3評価基準を満たさない原因が前記訓練データにあるときは、前記第3工程又は第4工程に戻ることを特徴とする学習済モデルの構築方法。
【請求項3】
請求項1又は2に記載の学習済モデルの構築方法であって、
前記第1工程において、ユーザが前記制御対象機械を操作すると、当該操作を含む情報がデータとして収集され、
前記第2工程において、収集されたデータが前記訓練データとして適切であるか否かが予め定められたルールに基づいて判定され、判定結果がユーザに提示されることを特徴とする学習済モデルの構築方法。
【請求項4】
請求項1から3までの何れか一項に記載の学習済モデルの構築方法であって、
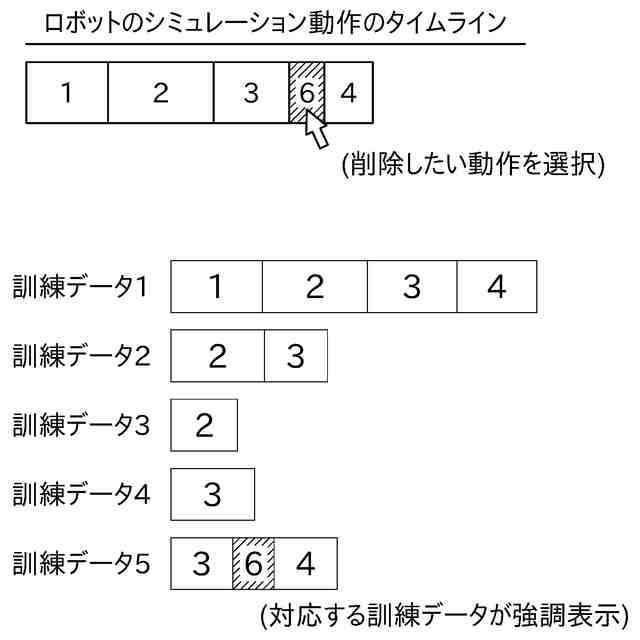
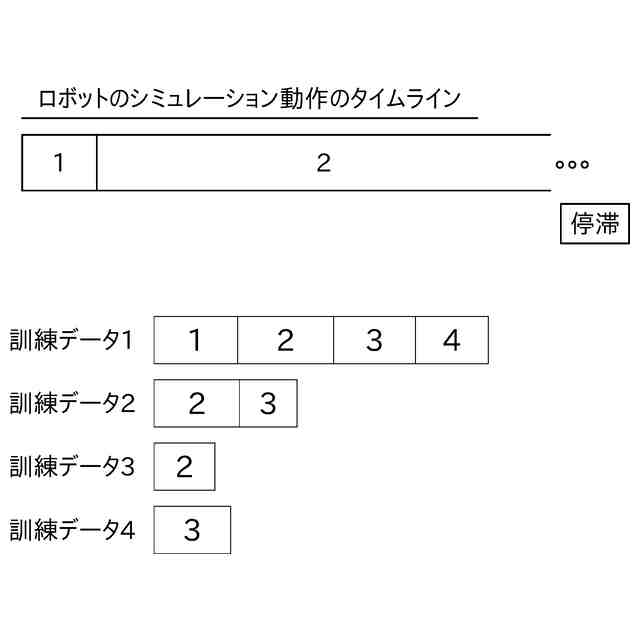
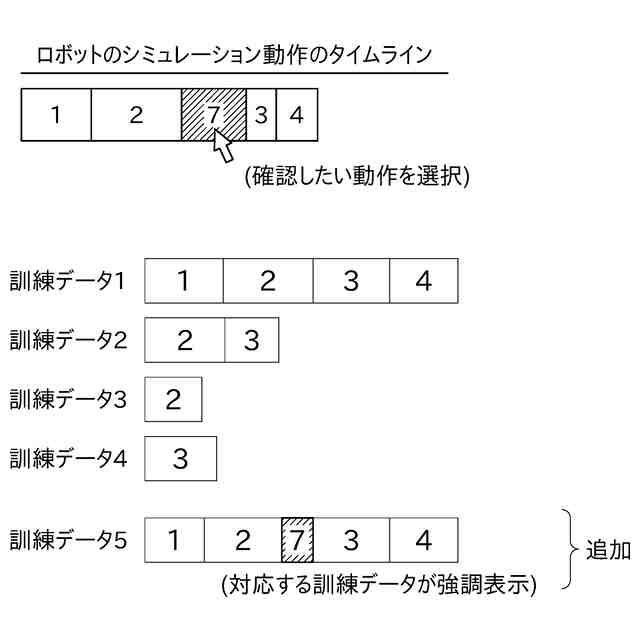
前記第5工程において構築された前記学習済モデルが推論フェーズで動作する場合に、コンピュータが、前記学習済モデルの出力の根拠となる、当該学習済モデルの構築に用いられた前記訓練データを特定して出力することを特徴とする学習済モデルの構築方法。
【請求項5】
請求項1から4までの何れか一項に記載の学習済モデルの構築方法であって、
前記第3評価基準を満たす前記学習済モデルの出力に基づいて制御対象機械を動作させたときの動作データをコンピュータが記録する第7工程と、
前記動作データを第4評価基準に基づいて評価し、前記第4評価基準を満たさない場合であって前記制御対象機械を再動作させたときにコンピュータが前記動作データの再記録を行う第8工程と、
を含むことを特徴とする学習済モデルの構築方法。
【請求項6】
請求項5に記載の学習済モデルの構築方法であって、
前記第8工程において、前記動作データが前記第4評価基準を満たさない場合であって、前記第4評価基準を満たさない原因が前記学習済モデルにあるときは、前記第5工程又は第6工程に戻ることを特徴とする学習済モデルの構築方法。
【請求項7】
請求項5又は6に記載の学習済モデルの構築方法であって、
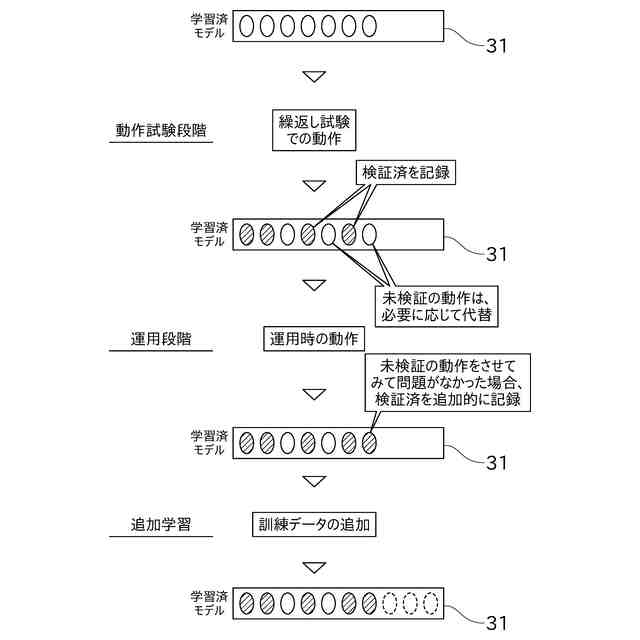
前記学習済モデルは、複数の学習要素を含み、
前記第7工程において、前記学習済モデルの出力に基づく前記制御対象機械の動作が検証された場合、コンピュータが、当該動作の根拠となった前記学習要素について検証済を記録し、
前記学習済モデルの実運用時には、コンピュータが、検証済でない前記学習要素に基づく前記学習済モデルの出力を、予め定められた出力に、又は、検証済の前記学習要素に基づく出力に変更可能であることを特徴とする学習済モデルの構築方法。
【請求項8】
請求項1から7までの何れか一項に記載の学習済モデルの構築方法であって、
前記制御対象機械はロボットであることを特徴とする学習済モデルの構築方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、機械学習による学習済モデルの構築に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、収集データから反復的に学習して法則やルールを自動的に見つけ出し、人間が自然に行っている学習能力と同様な機能を実現する機械学習を用いてロボットの動作等を制御するシステムが知られている。特許文献1は、この種のシステムを開示する。
【0003】
特許文献1の動作予測システムにおいては、オペレータがロボットアームを手動遠隔操作して作業を行わせたときのデータを動作予測モデルに機械学習させることにより、動作予測モデルが構築される。動作予測モデルの出力に基づいて、ロボットアームが自動運転される。
【先行技術文献】
【特許文献】
【0004】
特開2018-206286号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば特許文献1において構築された動作予測モデル(学習済モデル)について、その性能を評価することが必要な場合がある。しかし、ロボットアームの自律的な動作は、学習時にユーザが行った遠隔作業の品質、取得された訓練データの品質、構築された学習済モデルの品質、学習済モデルの出力に基づく自動動作の品質といった多様な側面が複合的に反映されたものである。また、それぞれの品質が他の品質に対して相互に影響を与える場合も多い。従って、それぞれの品質を単独で評価することが難しかった。この結果、学習済モデルを改良するニーズが生じたとしても何を改善すれば良いかが不明であり、非効率的な試行錯誤が要求されていた。
【0006】
本開示は以上の事情に鑑みてされたものであり、その目的は、高性能の学習済モデルを効率的に得ることにある。
【課題を解決するための手段】
【0007】
本開示の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0008】
本開示の観点によれば、以下の学習済モデルの構築方法が提供される。即ち、学習済モデルの構築方法は、第1工程と、第2工程と、第3工程と、第4工程と、第5工程と、第6工程と、を含む。前記第1工程では、コンピュータが、人間による制御対象機械の操作を機械学習するためのデータを収集する。前記第2工程では、前記収集されたデータである収集データを第1評価基準に基づいて評価し、前記第1評価基準を満たさない場合にコンピュータがデータを再収集する。前記第3工程では、コンピュータが、前記第1評価基準を満たす前記収集データから訓練データを選別する。前記第4工程では、前記訓練データを第2評価基準に基づいて評価し、前記第2評価基準を満たさない場合にコンピュータが訓練データを再選別する。前記第5工程では、コンピュータが、前記第2評価基準を満たす前記訓練データを用いた機械学習により学習済モデルを構築する。前記第6工程では、前記学習済モデルを第3評価基準に基づいて評価し、前記第3評価基準を満たさない場合にコンピュータが前記学習済モデルを再学習させる。
【0009】
このように、学習済モデルの構築までの作業を段階的に進め、各段階で評価を行うことで、各工程で問題が見つかった場合の原因の絞り込みが容易になる。従って、学習済モデルを円滑に構築することができる。
【発明の効果】
【0010】
本開示によれば、高性能の学習済モデルを効率的に得ることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
23日前
川崎重工業株式会社
断熱配管
23日前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ダクト継手
1か月前
川崎重工業株式会社
水中構造体
4日前
川崎重工業株式会社
塗装システム
23日前
川崎重工業株式会社
監視システム
24日前
川崎重工業株式会社
遠心ターボ機械
1か月前
川崎重工業株式会社
ゼオライト触媒
1か月前
川崎重工業株式会社
配管の支持構造
24日前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
ロボットシステム
24日前
川崎重工業株式会社
ロボットシステム
24日前
川崎重工業株式会社
遠心式ターボ機械
3日前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
エンドエフェクタ
1か月前
川崎重工業株式会社
基板搬送ロボット
1か月前
川崎重工業株式会社
バーナおよび燃焼器
4日前
川崎重工業株式会社
ワーク搬送ロボット
23日前
川崎重工業株式会社
多段遠心ターボ機械
9日前
川崎重工業株式会社
ダイクッション装置
3日前
川崎重工業株式会社
廃棄物処理システム
16日前
川崎重工業株式会社
ガスタービンエンジン
5日前
川崎重工業株式会社
締結方法及び締結装置
1か月前
川崎重工業株式会社
極低温流体用配管設備
25日前
川崎重工業株式会社
環状フレームの成形方法
1か月前
川崎重工業株式会社
ロボットの診断システム
24日前
川崎重工業株式会社
航空機の電気機械システム
5日前
川崎重工業株式会社
支援システムおよび支援方法
23日前
株式会社キッツ
逆流防止弁
24日前
川崎重工業株式会社
ロボットシステム及びロボット
1か月前
川崎重工業株式会社
クローズドインペラの製造方法
6日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ