TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131316
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028988
出願日
2024-02-28
発明の名称
ロボットシステム及びロボット
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B23P
19/00 20060101AFI20250902BHJP(工作機械;他に分類されない金属加工)
要約
【課題】ワークの向きを、正確に基準向きにする。
【解決手段】ロボットシステム1は、作業エリア13に搬送されたワーク(ボデー11)に対して作業を行う作業ロボット2と、作業エリアへワークを搬送する搬送車(AMR6)と、ワークに係合する係合部46と、係合部がワークに係合した状態でワークの向きが変化した際に係合部が従動的に回転するよう、係合部を保持する支持部(ロッド45)と、を有する、複数の支持ロボット(ロケータ4と)、搬送車から支持ロボットへ引き渡されたワークが、作業ロボットがワークに作業を行う際のワークの基準向きとなるよう、複数の支持ロボットの制御を通じて、ワークの向きを補正するコントローラ18と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
作業エリアに搬送されたワークに対して作業を行う作業ロボットと、
前記作業エリアへ前記ワークを搬送する搬送車と、
前記ワークに係合する係合部と、前記作業ロボットの作業中に前記係合部を介して前記ワークを支持すると共に、前記係合部が前記ワークに係合した状態で前記ワークの向きが変化した際に前記係合部が従動的に回転するよう、前記係合部を保持する支持部と、を有する複数の支持ロボットと、
前記搬送車から前記支持ロボットへ引き渡された前記ワークが、前記作業ロボットが前記ワークに作業を行う際の前記ワークの基準向きとなるよう、前記複数の支持ロボットの制御を通じて、前記ワークの向きを補正するコントローラと、
を備える、ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
前記係合部は、鉛直なZ軸を中心に回転し、
前記支持ロボットは、前記支持部を、前記Z軸、並びに、水平面内において互いに直交するX軸及びY軸の方向へ変位させる変位機構を有し、
前記複数の支持ロボットの前記係合部は、前記ワークにおける複数の部位に係合し、
前記コントローラは、複数の前記支持部を同期して水平方向に変位させることによって、前記ワークの向きを補正する、ロボットシステム。
【請求項3】
請求項1又は2に記載のロボットシステムにおいて、
前記作業エリアに到着しかつ前記搬送車から前記支持ロボットへ引き渡された前記ワークの向きに関係した信号を出力するセンサをさらに備え、
前記コントローラは、前記センサの信号に基づき前記ワークの向きを補正する、ロボットシステム。
【請求項4】
請求項1に記載のロボットシステムにおいて、
前記搬送車は、自律走行搬送ロボットである、ロボットシステム。
【請求項5】
ワークに係合する係合部と、
前記係合部を介して前記ワークを支持すると共に、前記係合部が前記ワークに係合した状態で前記ワークの向きが変化した際に前記係合部が従動的に回転するよう、前記係合部を保持する支持部と、
を備える、ロボット。
【請求項6】
請求項5に記載のロボットにおいて、
前記係合部と前記支持部との間に介在し、かつ前記係合部の回転時の摩擦を低減する摩擦低減部をさらに備える、ロボット。
【請求項7】
請求項6に記載のロボットにおいて、
前記摩擦低減部は、軸受である、ロボット。
【請求項8】
請求項5乃至7のいずれか1項に記載のロボットにおいて、
前記支持部は、水平なX軸の方向に延びるロッドであり、
前記係合部は、前記ロッドの先端において鉛直なZ軸の方向に延びかつ前記ワークの係合孔に差し込まれるピンを有すると共に、前記Z軸を中心に回転し、
前記ロッドを、前記X軸、前記Z軸、並びに、前記X軸及び前記Z軸に直交する水平なY軸の方向へ変位させる変位機構をさらに備え、
前記変位機構は、前記ピンが前記係合孔に差し込まれ、かつ前記ロッドが前記ワークを支持している状態で、前記ロッドを水平方向に変位させることにより、前記ワークの向きを調整する、ロボット。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、ロボットシステム及びロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、従来のロボットシステムが記載されている。従来のロボットシステムは、自動車の車体の組み立てラインに採用されている。組み立てラインでは、アンダーボデーにサイドメンバが組み付けられる。従来のロボットシステムは、第1の多軸ロボットと、第2の多軸ロボットと、を備えている。第1の多軸ロボットは、アンダーボデーを位置決めする。第2の多軸ロボットは、アンダーボデーとサイドメンバとを溶接する。従来のロボットシステムは、アンダーボデーを組み付けエリアに搬入するAGV(Automatic Guided Vehicle)をさらに備えている。AGVは、床面上の磁気テープに沿って走行する。
【先行技術文献】
【特許文献】
【0003】
特許第6887738号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットがワークに対して作業を行う作業エリアにおいては、ワークの基準向きが定められる。ワークの基準向きは、ロボットがワークに対して作業を行う際の、ワークの向きであって、水平面内における向きである。ワークの基準向きは、通常は、ワークが作業エリアへ搬送される際の、搬送方向に沿う向きである。
【0005】
自動車の製造ラインに適用されるロボットシステムには、ワークの向きを精度良く調整することが求められる。自動車の車体のような長尺のワークでは、僅かな向きのズレが、ワークの端では大きな位置のズレを招くためである。
【0006】
前記従来のロボットシステムにおいて、作業エリアへ到着したワークは、基準向きに対して傾いている場合がある。AGVがワークを作業エリアへ搬送するためである。従来のロボットシステムの作業エリアには、一対のガイドローラと、位置決め装置とが設置されている。一対のガイドローラは、AGVの車幅方向の位置決めを行い、位置決め装置は、AGVの前後方向の位置決めを行う。一対のガイドローラと位置決め装置との組み合わせは、ワークの向きを、正確に基準向きにすることができない。
【課題を解決するための手段】
【0007】
ここに開示する技術は、ロボットシステムに関する。ロボットシステムは、
作業エリアに搬送されたワークに対して作業を行う作業ロボットと、
前記作業エリアへ前記ワークを搬送する搬送車と、
前記ワークに係合する係合部と、前記作業ロボットの作業中に前記係合部を介して前記ワークを支持すると共に、前記係合部が前記ワークに係合した状態で前記ワークの向きが変化した際に前記係合部が従動的に回転するよう、前記係合部を保持する支持部と、を有する複数の支持ロボットと、
前記搬送車から前記支持ロボットへ引き渡された前記ワークが、前記作業ロボットが前記ワークに作業を行う際の前記ワークの基準向きとなるよう、前記複数の支持ロボットの制御を通じて、前記ワークの向きを補正するコントローラと、
を備える。
【発明の効果】
【0008】
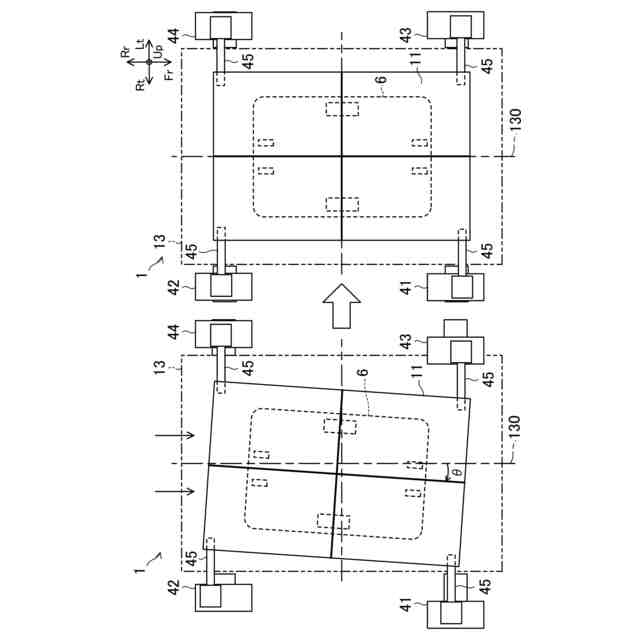
搬送車からワークを引き渡された複数の支持ロボットがワークの向きを補正するため、ロボットシステムは、ワークの向きを正確に基準向きにできる。ワークの向きが補正される際に、支持ロボットの係合部がワークに係合した状態で従動的に回転する。ワークが、係合部又は支持部に対して摺動することに起因する支持ロボットの負荷の増大が抑制される。
【図面の簡単な説明】
【0009】
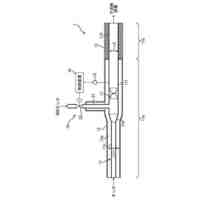
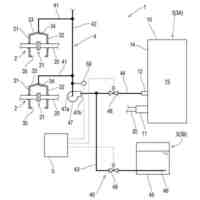
図1は、自動車の製造ラインに適用されたロボットシステムを示している。
図2は、ロボットシステムを示している。
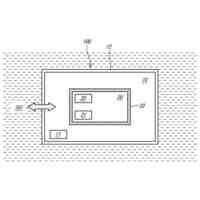
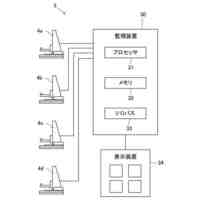
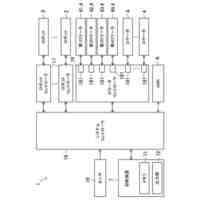
図3は、ロボットシステムのブロック図である。
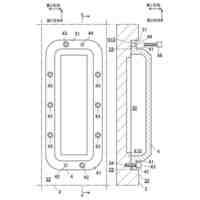
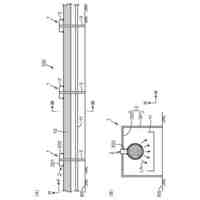
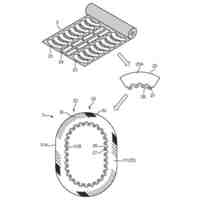
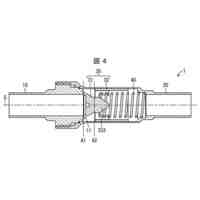
図4は、ロケータの斜視図である。
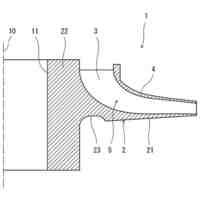
図5は、図4のV-V断面図である。
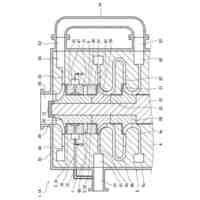
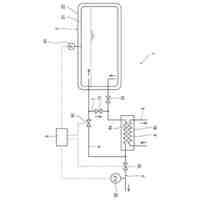
図6は、自律走行搬送ロボット(Autonomous Mobile Robot:AMR)のブロック図である。
図7は、ロケータによるワークの傾き補正の手順を示している。
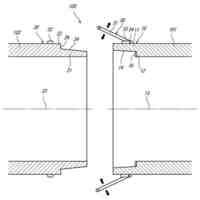
図8は、ロケータの係合部とワークとの係合状態を模式的に示す斜視図である。
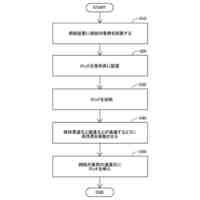
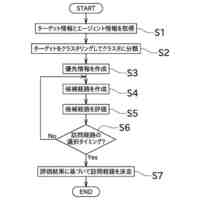
図9は、ロケータコントローラによるロケータの制御手順を示すフローチャートである。
図10は、センサの変形例を示している。
【発明を実施するための形態】
【0010】
以下、ロボットシステムの実施形態について、図面を参照しながら説明する。ここで説明するロボットシステムは例示である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
26日前
川崎重工業株式会社
断熱配管
26日前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
水中構造体
7日前
川崎重工業株式会社
ダクト継手
1か月前
川崎重工業株式会社
塗装システム
26日前
川崎重工業株式会社
監視システム
27日前
川崎重工業株式会社
遠心ターボ機械
1か月前
川崎重工業株式会社
配管の支持構造
27日前
川崎重工業株式会社
ゼオライト触媒
1か月前
川崎重工業株式会社
ロボットシステム
27日前
川崎重工業株式会社
ロボットシステム
27日前
川崎重工業株式会社
遠心式ターボ機械
6日前
川崎重工業株式会社
バーナおよび燃焼器
7日前
川崎重工業株式会社
ダイクッション装置
6日前
川崎重工業株式会社
ワーク搬送ロボット
26日前
川崎重工業株式会社
多段遠心ターボ機械
12日前
川崎重工業株式会社
廃棄物処理システム
19日前
川崎重工業株式会社
極低温流体用配管設備
28日前
川崎重工業株式会社
締結方法及び締結装置
1か月前
川崎重工業株式会社
ガスタービンエンジン
8日前
川崎重工業株式会社
環状フレームの成形方法
1か月前
川崎重工業株式会社
ロボットの診断システム
27日前
川崎重工業株式会社
航空機の電気機械システム
8日前
株式会社キッツ
逆流防止弁
27日前
川崎重工業株式会社
支援システムおよび支援方法
26日前
川崎重工業株式会社
クローズドインペラの製造方法
9日前
川崎重工業株式会社
経路作成方法及び経路作成装置
26日前
川崎重工業株式会社
付加製造方法及び付加製造装置
6日前
川崎重工業株式会社
付加製造方法及び付加製造装置
6日前
川崎重工業株式会社
ガス燃料供給システムおよび船舶
1か月前
川崎重工業株式会社
アンモニア回収システム及び方法
26日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
6日前
川崎重工業株式会社
配管の接続構造および配管システム
29日前
川崎重工業株式会社
ロボットシステム及びその動作方法
28日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ