TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117009
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011631
出願日
2024-01-30
発明の名称
ロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20250804BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットと干渉物とを識別し、干渉物の接近を検知する。
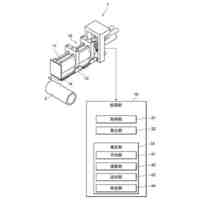
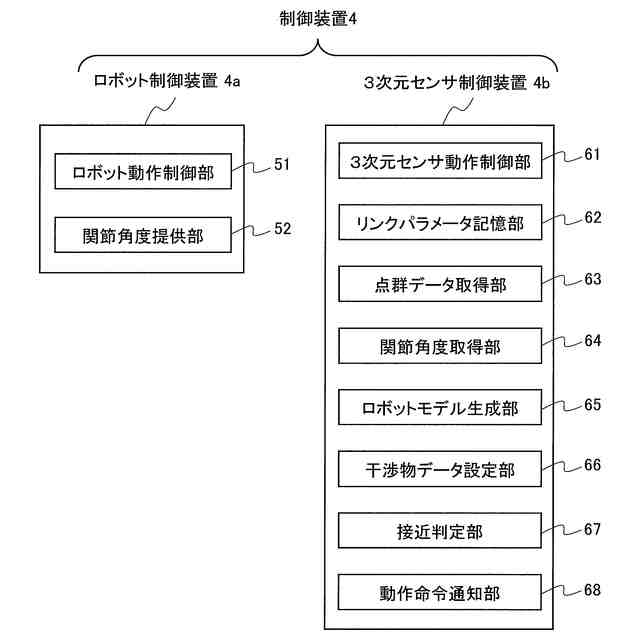
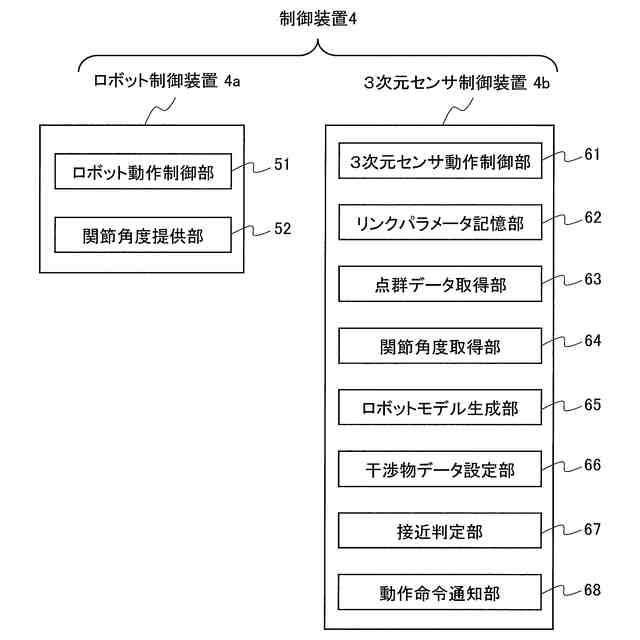
【解決手段】ロボットシステムの制御装置4は、ロボットのリンクパラメータの値を記憶するリンクパラメータ記憶部62と、3次元センサから点群データを取得する点群データ取得部63と、ロボットアームの各関節の現在の関節角度を取得する関節角度取得部64と、リンクパラメータ及び関節角度に基づいて、ロボットの現在の姿勢と同様な姿勢を示すロボットモデルを生成するロボットモデル生成部65と、ロボットモデルを用いて点群データから少なくともロボットを示す点を除去し、残りの点群データを干渉物データとして設定する干渉物データ設定部66と、干渉物データ及びロボットモデルを用いて干渉物とロボットとの距離を算出し、距離に基づいて干渉物とロボットとが接近しているか否かを判定する接近判定部67と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
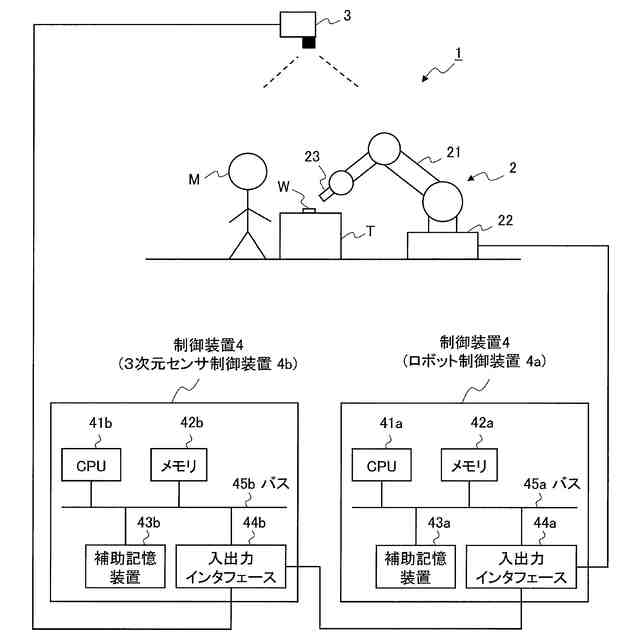
ロボットアームを有する1又は複数のロボットと、前記ロボットの動作可能範囲を含む空間を撮像する1又は複数の3次元センサと、前記ロボット及び前記3次元センサの動作を制御する1又は複数の制御装置と、を備えるロボットシステムであって、
前記制御装置は、
前記ロボットのリンクパラメータの値を記憶するリンクパラメータ記憶部と、
前記3次元センサから、前記空間に置かれた物体の表面の位置を示す点の集まりである点群データを取得する点群データ取得部と、
前記ロボットアームの各関節の現在の関節角度を取得する関節角度取得部と、
前記リンクパラメータ及び前記関節角度に基づいて、前記ロボットの現在の姿勢と同様な姿勢を示すロボットモデルを生成するロボットモデル生成部と、
前記ロボットモデルを用いて前記点群データから少なくとも前記ロボットを示す点を除去し、残りの前記点群データを干渉物の位置を示す点の集まりである干渉物データとして設定する干渉物データ設定部と、
前記干渉物データ及び前記ロボットモデルを用いて前記干渉物と前記ロボットとの距離を算出し、前記干渉物と前記ロボットとの距離に基づいて前記干渉物と前記ロボットとが接近しているか否かを判定する接近判定部と、
を備えることを特徴とするロボットシステム。
続きを表示(約 570 文字)
【請求項2】
前記ロボットモデル生成部は、前記リンクパラメータ及び前記関節角度に基づいて前記ロボットの各部位の位置を示す点を基準点として算出し、前記基準点に基づいて前記ロボットモデルを生成する
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記ロボットモデル生成部は、前記基準点に従って定義される空間図形をロボットオブジェクトとし、
前記干渉物データ設定部は、前記点群データから少なくとも前記ロボットオブジェクトの内部に含まれる点を除去し、前記干渉物データを生成する
ことを特徴とする請求項2に記載のロボットシステム。
【請求項4】
前記接近判定部は、前記干渉物データをグループ分けし、グループごとに前記干渉物と前記ロボットとの距離を算出する
ことを特徴とする請求項1に記載のロボットシステム。
【請求項5】
前記接近判定部は、前記干渉物データに含まれる点又は前記干渉物データに従って定義される空間図形と、前記ロボットモデルに含まれる点又は前記ロボットモデルに従って定義される空間図形との距離を、前記干渉物と前記ロボットとの距離として算出する
ことを特徴とする請求項1から請求項4のいずれかに記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、人等の干渉物の接近を検知するロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、安全柵なしで人と協働して作業を行う協働ロボットが注目されている。協働ロボットの安全対策は、人等の干渉物との接触を検知すると、ロボットに危険を回避させる手法と、干渉物の接近を検知すると、ロボットに危険を回避させる手法とがある。後者の手法は、干渉物との接触前に危険回避動作を命令するので、前者の手法よりも安全性が高いと言える。後者の一例として、特許文献1に、物体との間に生じる静電容量の変化によって物体が近接したことを検出する近接センサを用いたシステムが記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第7109562号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、静電容量方式の近接センサでは、ロボットの外回しの配線や据付ベース等を干渉物として検出してしまうという課題がある。ロボットの動作を制御するロボット制御装置は、予めロボットの附属物や各部位の位置を記憶し、これらとロボットアームが接触しないように制御するため、干渉物として検出する必要はない。仮にロボットの附属物や各部位を干渉物として検出してしまうと、本来の目的の動作を実行できないか、又は動作範囲が制限され、著しく生産効率が低下する恐れがある。
【0005】
本発明は、前述した事情に鑑みてなされたものであり、主要な目的は、ロボットと干渉物とを識別し、干渉物の接近を検知するロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
前述した目的を達成するための本発明は、ロボットアームを有する1又は複数のロボットと、前記ロボットの動作可能範囲を含む空間を撮像する1又は複数の3次元センサと、前記ロボット及び前記3次元センサの動作を制御する1又は複数の制御装置と、を備えるロボットシステムであって、前記制御装置は、前記ロボットのリンクパラメータの値を記憶するリンクパラメータ記憶部と、前記3次元センサから、前記空間に置かれた物体の表面の位置を示す点の集まりである点群データを取得する点群データ取得部と、前記ロボットアームの各関節の現在の関節角度を取得する関節角度取得部と、前記リンクパラメータ及び前記関節角度に基づいて、前記ロボットの現在の姿勢と同様な姿勢を示すロボットモデルを生成するロボットモデル生成部と、前記ロボットモデルを用いて前記点群データから少なくとも前記ロボットを示す点を除去し、残りの前記点群データを干渉物の位置を示す点の集まりである干渉物データとして設定する干渉物データ設定部と、前記干渉物データ及び前記ロボットモデルを用いて前記干渉物と前記ロボットとの距離を算出し、前記干渉物と前記ロボットとの距離に基づいて前記干渉物と前記ロボットとが接近しているか否かを判定する接近判定部と、
を備えることを特徴とするロボットシステムである。
【0007】
前記ロボットモデル生成部は、前記リンクパラメータ及び前記関節角度に基づいて前記ロボットの各部位の位置を示す点を基準点として算出し、前記基準点に基づいて前記ロボットモデルを生成するようにしても良い。
【0008】
また、前記ロボットモデル生成部は、前記基準点に従って定義される空間図形をロボットオブジェクトとし、前記干渉物データ設定部は、前記点群データから少なくとも前記ロボットオブジェクトの内部に含まれる点を除去し、前記干渉物データを生成するようにしても良い。
【0009】
また、前記接近判定部は、前記干渉物データをグループ分けし、グループごとに前記干渉物と前記ロボットとの距離を算出するようにしても良い。
【0010】
また、前記接近判定部は、前記干渉物データに含まれる点又は前記干渉物データに従って定義される空間図形と、前記ロボットモデルに含まれる点又は前記ロボットモデルに従って定義される空間図形との距離を、前記干渉物と前記ロボットとの距離として算出するようにしても良い。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
エンドミル
13日前
株式会社不二越
歯車加工装置
8日前
株式会社不二越
歯車加工装置
8日前
株式会社不二越
歯車加工装置
8日前
株式会社不二越
X線測定装置
13日前
株式会社不二越
噛み込み検知装置
21日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
垂直多関節ロボット
今日
株式会社不二越
斜板式ピストンポンプ
1か月前
株式会社不二越
固定構造および固定治具
27日前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社不二越
超硬合金およびこれを用いた切削工具
27日前
株式会社不二越
センサシステム及びロボットシステム
1か月前
株式会社不二越
直動軸受用合金鋼およびそれを用いた直動軸受
23日前
株式会社不二越
冷間金型用合金鋼およびそれを用いた冷間金型
27日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
15日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
製函機
2か月前
株式会社竹中工務店
補助セット
1か月前
CKD株式会社
把持装置
2か月前
株式会社三協システム
移載装置
2か月前
トヨタ自動車株式会社
学習装置
今日
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
1か月前
SMC株式会社
着脱装置
2か月前
株式会社マキタ
ハンマドリル
24日前
株式会社マキタ
ハンマドリル
24日前
株式会社ミクロブ
把持装置
2か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
エッジ仕上げ装置
2か月前
本田技研工業株式会社
装置
1か月前
株式会社安川電機
ロボット
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ