TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025158501
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061090
出願日
2024-04-04
発明の名称
センサシステム及びロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
G01V
3/08 20060101AFI20251009BHJP(測定;試験)
要約
【課題】導体の検出精度を向上できるセンサシステムを提供する。
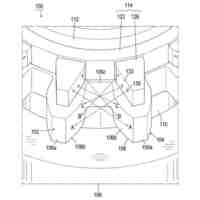
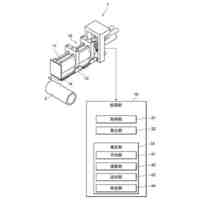
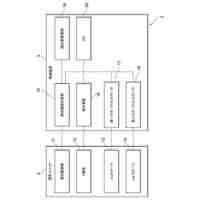
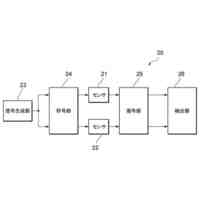
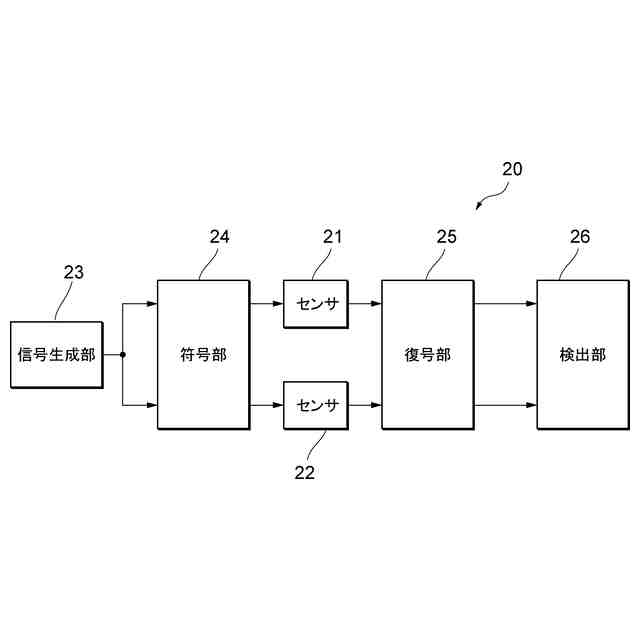
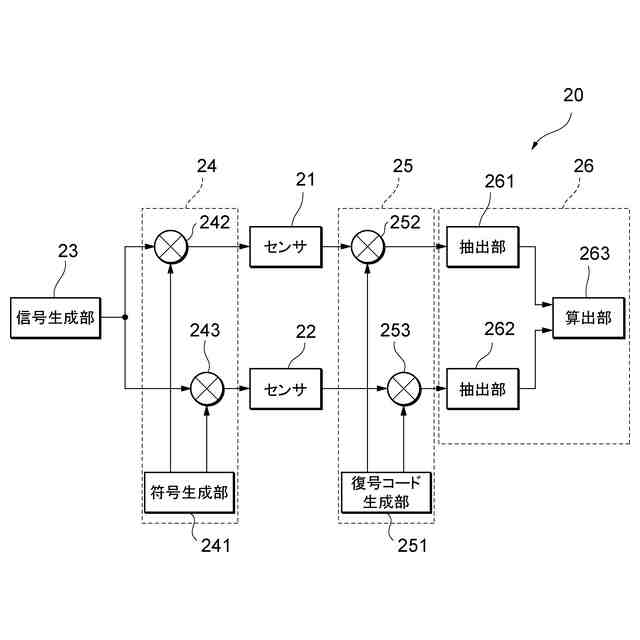
【解決手段】センサシステム(20)は、所定の周波数を有する基準信号を生成する信号生成部(23)と、基準信号を互いに異なる第1符号及び第2符号によって符号化する符号化部(24)とを備える。また、センサシステムは、第1符号で符号化された信号に従って第1領域内の導体を検出する静電容量型の第1センサ(21)と、第2符号で符号化された信号に従って第1領域と少なくとも一部が重複する第2領域内の導体を検出する静電容量型の第2センサ(22)とを備える。また、センサシステムは、第1センサから送信される第1検出信号を第1符号に従って復号し第2センサから送信される第2検出信号を第2符号に従って復号する復号部(25)と、復号された信号に基づいて導体の有無及び位置を検出する検出部(26)とを備える。
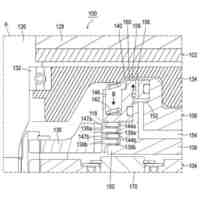
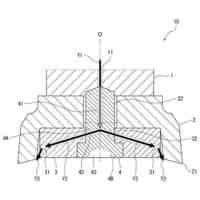
【選択図】図3
特許請求の範囲
【請求項1】
所定の周波数を有する基準信号を生成する信号生成部と、
前記基準信号を互いに異なる第1符号及び第2符号によって符号化する符号化部と、
前記第1符号で符号化された信号に従って第1領域内の導体を検出する静電容量型の第1センサと、
前記第2符号で符号化された信号に従って前記第1領域と少なくとも一部が重複する第2領域内の導体を検出する静電容量型の第2センサと、
前記第1センサから送信される第1検出信号を前記第1符号に従って復号し、前記第2センサから送信される第2検出信号を前記第2符号に従って復号する復号部と、
前記復号部によって復号された信号に基づいて前記第1領域及び前記第2領域における導体の有無及び位置を検出する検出部と、
を備えることを特徴とするセンサシステム。
続きを表示(約 810 文字)
【請求項2】
前記第1符号は、前記第2符号に対して直交する符号であることを特徴とする請求項1に記載のセンサシステム。
【請求項3】
前記第1センサは、検出面が前記第2センサの検出面に対して隣接して設けられることを特徴とする請求項2に記載のセンサシステム。
【請求項4】
前記検出部は、前記復号部によって前記第1符号に従って復号された信号から前記所定の周波数を有する信号を抽出する第1抽出部と、前記復号部によって前記第2符号に従って復号された信号から前記所定の周波数を有する信号を抽出する第2抽出部と、前記第1抽出部が抽出した信号及び前記第2抽出部が抽出した信号に基づいて前記第1領域及び前記第2領域における導体の有無及び位置を算出する算出部と、を有することを特徴とする請求項1~3のいずれか一項に記載のセンサシステム。
【請求項5】
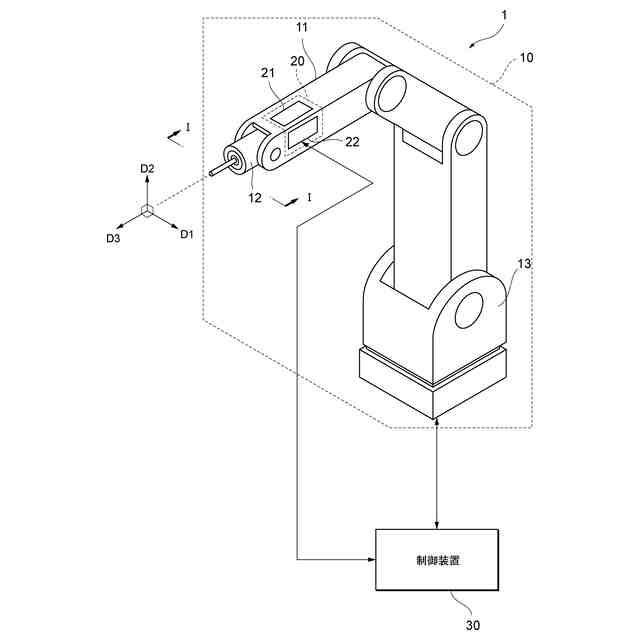
アーム部と、
前記アーム部上に設けられているセンサシステムと、
を備え、
前記センサシステムは、
所定の周波数を有する基準信号を生成する信号生成部と、
前記基準信号を互いに直交する第1符号及び第2符号で符号化する符号化部と、
前記第1符号で符号化された信号に従って第1領域内の導体を検出する静電容量型の第1センサと、
前記第2符号で符号化された信号に従って前記第1領域と少なくとも一部が重複する第2領域内の導体を検出する静電容量型の第2センサと、
前記第1センサから送信される第1検出信号を前記第1符号に従って復号し、前記第2センサから送信される第2検出信号を前記第2符号に従って復号する復号部と、
前記復号部によって復号された信号に従って前記第1領域及び前記第2領域における物体の有無及び位置を検出する検出部と、
を有することを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、センサシステム及びロボットシステムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来から、静電容量型の近接センサを用いるセンサシステムが知られている。
【0003】
これに関し、特許文献1に、1つのセンサ電極と、第一系統を構成する第一検出回路と、第二系統を構成する第二検出回路と、第一系統と第二系統とを順次にセンサ電極に接続し切り替えるスイッチとを備える静電容量型近接検出装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第7009549号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、2つの系統を交互に励起することによって2つの系統間の相互干渉を防止しているが、一方の系統が検出動作を行っている間、他方の系統による検出動作が中断されてしまう。したがって、特許文献1に記載の技術では、センサシステムの検出精度が低下してしまうという問題があった。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、センサシステム、及びセンサシステムが搭載されたロボットシステムによる導体の検出精度を向上することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のセンサシステムは、所定の周波数を有する基準信号を生成する信号生成部と、前記基準信号を互いに異なる第1符号及び第2符号によって符号化する符号化部と、前記第1符号で符号化された信号に従って第1領域内の導体を検出する静電容量型の第1センサと、前記第2符号で符号化された信号に従って前記第1領域と少なくとも一部が重複する第2領域内の導体を検出する静電容量型の第2センサと、前記第1センサから送信される第1検出信号を前記第1符号に従って復号し、前記第2センサから送信される第2検出信号を前記第2符号に従って復号する復号部と、前記復号部によって復号された信号に基づいて前記第1領域及び前記第2領域における導体の有無及び位置を検出する検出部と、を備える。
【0008】
また、前記第1符号は、前記第2符号に対して直交する符号である。
【0009】
また、前記第1センサは、検出面が前記第2センサの検出面に対して隣接して設けられる。
【0010】
また、前記検出部は、前記復号部によって前記第1符号に従って復号された信号から前記所定の周波数を有する信号を抽出する第1抽出部と、前記復号部によって前記第2符号に従って復号された信号から前記所定の周波数を有する信号を抽出する第2抽出部と、前記第1抽出部が抽出した信号及び前記第2抽出部が抽出した信号に基づいて前記第1領域及び前記第2領域における物体の有無及び位置を算出する算出部と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
硬質材料
2か月前
株式会社不二越
ロボット
1か月前
株式会社不二越
エンドミル
23日前
株式会社不二越
流路切換弁
2日前
株式会社不二越
歯車加工装置
18日前
株式会社不二越
歯車加工装置
18日前
株式会社不二越
X線測定装置
23日前
株式会社不二越
歯車加工装置
18日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
噛み込み検知装置
1か月前
株式会社不二越
ノンリーク三方弁
2か月前
株式会社不二越
回転駆動システム
4日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
垂直多関節ロボット
10日前
株式会社不二越
複合アクチュエータ
2か月前
株式会社不二越
移動ロボットシステム
2か月前
株式会社不二越
斜板式ピストンポンプ
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社不二越
固定構造および固定治具
1か月前
株式会社不二越
可変容量制御ピストンポンプ
2か月前
株式会社不二越
X線回折測定装置及びプログラム
2か月前
株式会社不二越
ダイヤモンド膜の密着性能評価方法
4日前
株式会社不二越
センサシステム及びロボットシステム
1か月前
株式会社不二越
超硬合金およびこれを用いた切削工具
1か月前
株式会社不二越
歯車加工用合金鋼およびそれを用いた歯車
2か月前
株式会社不二越
歯切工具用部品およびそれを用いた歯切工具
2日前
株式会社不二越
冷間金型用合金鋼およびそれを用いた冷間金型
1か月前
株式会社不二越
直動軸受用合金鋼およびそれを用いた直動軸受
1か月前
個人
採尿及び採便具
1か月前
日本精機株式会社
検出装置
25日前
個人
計量機能付き容器
20日前
個人
高精度同時多点測定装置
1か月前
個人
アクセサリー型テスター
1か月前
株式会社カクマル
境界杭
10日前
甲神電機株式会社
電流検出装置
25日前
株式会社ミツトヨ
測定器
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ