TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025157350
公報種別
公開特許公報(A)
公開日
2025-10-15
出願番号
2025116914
出願日
2025-07-11
発明の名称
高精度同時多点測定装置
出願人
個人
代理人
主分類
G01M
3/24 20060101AFI20251007BHJP(測定;試験)
要約
【課題】複数の検知手段を配管管路の様な一体の構造物に設置し、漏洩箇所の特定等を目的として弾性波等を観測する場合、検知手段間の時刻情報の校正に多大な費用・労力が費やされている。安価で高精度な時刻の同期の手法を実現し、また、自動で各検知手段の距離計測を自動的に行う。
【解決手段】検知手段においてターゲットとなる情報に加え、標準時刻電波等を受信し一体の情報として管理し、この時刻情報を元に各検知手段で観測されたデータの時系列情報を補正する。各検知手段とその観測データの伝送に、防災行政無線の帯域である260MHz帯を使用することにより、リアルタイムに近い解析を行う。打鍵による人工的な弾性波を発生させ、検知手段間の距離を算出する。
【選択図】なし
特許請求の範囲
【請求項1】
被測定物に複数の検知手段を持つ同時多点測定装置において、地上基地から発信される標準電波の時刻信号波を受信する受信部と、この受信部で受信した時刻信号波と前記検知手段からのデータを同時にアナログ/デジタル変換し、一体のデータとして保存あるいは伝送する機能を有する同時多点測定装置。
続きを表示(約 370 文字)
【請求項2】
請求項1の同時多点測定装置において、標準電波の時刻信号波の代替あるいは補完として、準天頂衛星からの時刻情報を含んだ電波を受信する受信部と、受信した時刻情報を標準電波の発信形式に加工する変換部と、変換された時刻情報と前期検知手段からのデータを同時にアナログ/デジタル変換し、一体のデータとして保存あるいは伝送する機能を有する。
【請求項3】
請求項1,2の同時多点測定装置において、水道事業等、公共の用途に使用する場合、外部の監視装置や、解析用の計算機等へのデータの伝送手段として公共事業体に割り当てられているデジタル形式の260MHz帯の周波数を用いる機能を有する。
【請求項4】
請求項1の同時多点測定装置において、検知手段間の精密な距離を計測するための打鍵音発生装置を有する。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被測定物に設けられた複数の検知手段からのデータを取得し、データ間の時間的な分析を行う同時多点測定装置に関し、具体的には、複数の検知手段により、管路内の弾性波データを取得し、検知手段間における管路の漏洩を検知する漏洩検知装置や、複数の観測点に設けられた地殻変動の検知手段により、地震の震源地を測定する震源地測定装置などに応用される同時多点測定装置に関する。例えば上水道の水道管の漏水を検知や推定するためのシステム(漏水検知システムと記載する場合がある)が開発されている。従来技術例の漏水検知システムは、埋設管にセンサが設置され、センサによって埋設管の振動を検出する。このシステムは、センサから取得した検出信号の解析処理に基づいて、埋設管の漏水の有無や位置を判定する。
続きを表示(約 11,000 文字)
【背景技術】
【0002】
漏水検知システムに係わる先行技術例として、特開2017-167063 号公報( 特許文献1) 、特開平9-23483号公報( 特許文献2 )、特開2005-33137号公報( 特許文献3 ) が挙げられる。特許文献1には、漏洩位置検出方法等として、閉回路レーダー装置を用いて、地中埋設管における流体の漏洩位置を特定する旨や、管を被覆して土壌との接触を防止する「遮液性被覆部材」等が記載されている。特許文献2 には、管路破断検知システムとして、管路網の管路上に無線通信機能および漏水推定機能を備えたセンサを多数設置し、隣接するセンサが協調して分散的に漏水検知を行う旨が記載されている。特許文献3 には、漏水監視装置等として、水道配管を伝わった漏水音振動を振動センサにて電気信号に変換し、漏水音振動が複数のどの漏水検出レベルに対応するかを判定する旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-167063号公報特開平9-23483号公報特開2005-33137 号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
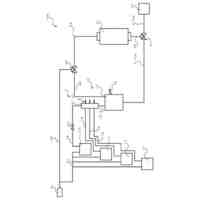
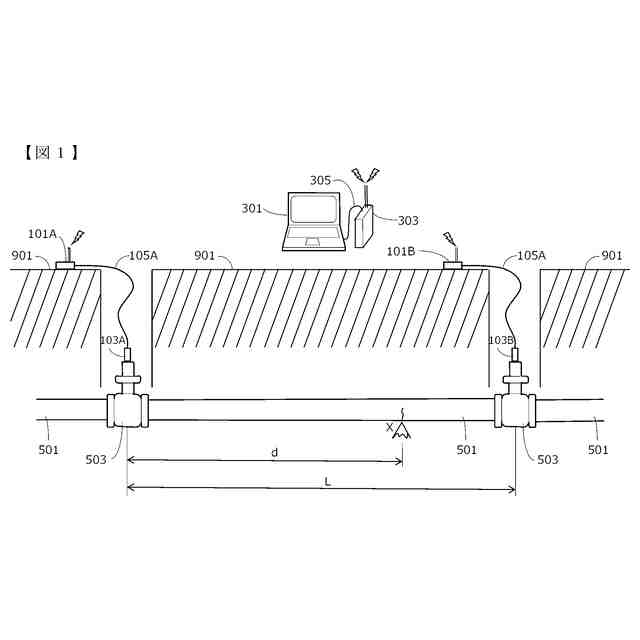
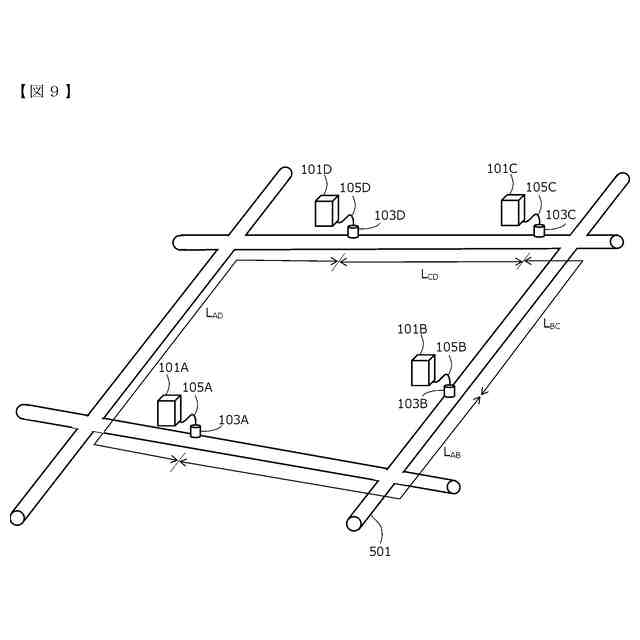
従来、この種の複数の検知点を有する同時多点測定装置としては、例えば地中などに埋設した管路(水道管、ガス管等の圧力管)の漏洩の有無及び漏洩個所の特定に用いられる漏洩検知器が知られている。図1は、現在実用化されている漏水検知装置の一般的な構成および原理を説明する概略図である。同図において、501は地中に埋設した管路、503は制水弁のようなマンホールあるいはハンドホール内に露出した設備、101A、103A、105Aはそれぞれ送受信装置、加速度あるいは速度センサ、接続ケーブルである。(以後この3つを総称して検知手段Aと呼ぶ。)101B、103B、105B(以後この3つを総称して検知手段Bと呼ぶ。)は2つ目の検知手段である、なお、ここでは2つの検知手段のみを表示しているが、通常は2つ以上の検知手段を持って漏水の検知を行う。301は加速度あるいは速度センサによって受信した弾性波データから漏水位置を計算する解析用のパーソナルコンピューターであり、303は送受信装置、305は接続ケーブルである。なお、検知手段の送受信装置と解析用のパーソナルコンピューターに接続している送受信装置は、通常の場合、無線、あるいは有線通信によって弾性波データや制御コマンド等のやり取りを行う。また901は地表面を示している。このような装置において、時刻T1に検知装置A、B間のX地点において漏水が発生したと仮定する。この状態では、図3に示すように、検知手段Aにおいては漏水発生に伴う検知信号が時間τ1後に観測されるとともに、検知手段Bでも同じ漏水発生に伴う検知信号が時刻τ2後に観測される。ここで、加速度あるいは速度センサ103Aから漏水地点Xまでの距離dは、2つの検知装置A、に届いた漏水音(弾性波)の時間差τを用いて次の数式1にてあらわせる。数式1において、Lは加速度あるいは速度センサ103A、103B間の距離、cは管路を構成する物質中の音速(弾性波速度)であり、これらはいずれも既知量である。よって、検知手段A、Bで検知される漏水音(弾性波)の到達時刻の差τを観測することで、漏水地点Xの位置を特定することが可能となる。ただし、実際に観測される弾性波データには、漏水音の他に、通行車両の走行による振動、人の歩行による振動、自動販売機のコンプレッサーの稼働音等、産業活動による振動や風雨・波浪・潮汐等の自然現象などに起因する振動が含まれるため、これらを除去するため、検知手段にて観測された弾性波データの相互相関の計算やスペクトル解析等を行うことが必要となる。各検知手段で観測された弾性波データは、それ単独では各観測点の振動状態の情報でしかない。これらを時間軸情報によって結びつけることによって、初めて漏水地点の解析が行える。このため、現行の漏水検知器では各検知手段に高精度の時計を内蔵し、観測作業に先立って各検知手段の時計合わせを行い、観測時に振動データと時計情報を何らかの形で結び付けて記録している。前述の数式1のcは、水道やガス管の主要材料である鋳鉄の場合、およそ5,600m/sである。(厳密には管の口径によって若干異なる。)仮にτの観測に1%の誤差が生じると算出されるLの値には2.3mの誤差が生じることになる。では、実用とされる範囲内で、この誤差をどの程度許容するのかによって、内蔵する時計に求められる精度や、時計合わせの手法が変わってくる。どの程度の誤差であれば許容できるのかについて、実際に路面を掘削し、漏水個所を確認し応急修理を行うことを想定し、経済性の面から検証を行う。現在、水道管工事の際の最小掘削幅は作業員の作業スペースを確保する関係から0.6m程度となっている。このため、掘削に使用されるバックホウと呼ばれる重機には一挙に0.6mの幅を掘削するためのバケットが装着されている。よって一回の掘削で漏水個所を露出させるためには、漏水検知器で特定される漏水位置の誤差は少なくとも0.6mの半分の0.3m以下である必要がある。図5において、501は漏水が発生した水道管、701は漏水検知器によって算出された予想漏水地点、705は実際の漏水地点、703は掘削範囲である。図5に基づいて説明すると、漏水検知器により推定された漏水位置を中心として、管路の延長方向に対し0.6m幅で掘削を行うと、推定された漏水位置から掘削範囲の境界までは0.3mとなる。しかし、この誤差0.3mという数字はあくまで掘削範囲内に漏水箇所が露出するという論理的な数値である。実際の応急修理の際は漏水した管にクランプや割継輪といった止水器具を取り付けるため、この器具自体の大きさや、装着するために作業員が回り込ためのスペースを考慮すると、誤差は最大でも0.1m程度の範囲内に抑えることが理想である。漏水位置の特定に0.1m以上の誤差が発生すると、管路の延長方向に追加で掘削をする必要があるが、この場合でも追加で掘削する範囲は機械が掘削可能な最小幅の0.6mとなる。人力で必要なだけ掘削幅を広げるという手段もあるがこれは機械掘削に比べ多大な時間を要するため、漏水している管路への応急措置を一刻でも早く行うことを主眼とすれば、この選択肢はとり得るものではない。つまり、誤差0.1m以内で漏水位置を特定できなった場合、土工事の掘削・埋め戻しの量や舗装の壊し・復旧量は自動的に2倍、3倍と膨れ上がり作業時間も当然それに呼応して2倍、3倍となり、経済的、時間的な負荷が増大する。漏水位置の特定誤差の許容値が0.1mとする内と、内蔵する時計の精度は少なくとも誤差十万分の一秒以下要求され、尚かつこの精度内で全検知手段の時計合わせを行う必要がある。十万分の一秒以下の精度で各検知手段の時計を調整するには、到底人間が手作業でスイッチ操作を行って実現できるレベルではない。全検知手段を一か所に集め有線なり無線なりで親機のようなものと接続し、親機のようなものから一斉に時刻情報を発信して時計を同期させる機構が必要となる。この機構自体は簡易なもので済むが、全検知手段に高精度な時計とともにこの実装することになれば必然的に漏水検知装置自体の製造コストが増大することになる。数式1で漏水地点を算出するためには、τの観測に加えてもうひとつ各検知手段の距離Lを計測する必要がある。数式1によれば、Lの計測誤差はその1/2が漏水予測地点dの誤差となる。このため、漏水位置の特定誤差の許容値が0.1mとすると、Lの計測は0.2m以内の精度で良いことになる。この程度の精度であれば巻き尺等を用いて人力を要して計測することも可能であるが、現行の漏水検知器のように多数の検知手段を配置する場合、作業に係る労力とそれに要する時間は無視できないものとなる。例えば図7のように検知手段を一つの管路上に直線的に配置した場合、距離の計測は3回で十分となる。この場合、検知手段AとDの距離LADはLAB、LBC、LCDの和を求めることで算出できる。同様に他の検知手段間の距離もLAB、LBC、LCDのいずれかの和を求めることで算出できる。しかし、大規模な市街地や集落の場合は管路がネットワーク上になっていることが多く、図7のような一次元的な考え方が適用できないことがある。例えば図8に示したように管路が回廊上になっている場合、検知手段AとDの距離LADはLAB、LBC、LCDの和とならないため、別途計測を行う必要がある。図9は極めて単純な事例示したものであるが、さらに配管状況が複雑になれば各検知手段間の距離を別途測定する必要性が出てくる可能性がある。各検知手段で取得した弾性波データは最終的に親機や解析用のパーソナルコンピューター等に集約し、相関計算等の解析を行うことになる。つまり、何らかの手段で取得したデータの搬送が必要となるが、旧来の検知手段が2点のみの製品では特定小電力タイプを用いた無線通信を使用する事が多かった。これは、検知手段が2点のみなので、見通しの利く状態での検知手段を配置すれば良好な通信環境が得られたこと、平成17年の電波法改正以前に発売された製品が多く高出力での通信が行えたこと理由として挙げられる。しかし、多くの検知手段を配置し広範な地域の漏水を一挙に検知しようとする多点式の場合は各検知手段間の見通しを確保することは難しく、また、国内向けの製品であれば電波法の改正により安易に出力を上げることもできないため、別の方法を採用する必要がある。有線で各検知手段を接続する方法もあるが、これはケーブルの敷設や回収だけでも非常に手間が係るうえ、市街地では敷設作業による道路交通への影響も無視できなくなる。このため、各検知手段間を有線で接続する方法はほとんど採用されていない。実際に採用されている方法多くはLPWANやWi-Fi、Bluetoothのような標準化された規格を用いた近距離通信や、外部記憶媒体を利用したオフラインでのデータ搬送等である。近距離通信を使用する場合は検知手段を測定のために設置した場所から一旦取り外し、親機あるいは解析用のパーソナルコンピューター等と疎通ができる距離まで移動させる必要がある。あるいは最近実用化されたドライブバイという技術で、親機や解析用のパーソナルコンピューターを自動車に搭載し、各検知手段の近傍を巡回走行してデータを収集する手法を取ることもある。これらのいずれの手段を用いても、作業員が各検知手段から記録された弾性波データを回収する必要があり、計測作業時間が増大してしまう。実際に現場で漏水調査を行う場合、水がすでに噴き出しているような場合を除けば、検知手段を設置して即座に明確な漏水が発見される事例は少ない。漏水かと思われる怪しい波形をとらえると、検知手段の配置を適宜変更し、再度波形を確認するといったトライアンドエラーの繰り返しとなる場合が多い。現場の作業員が渇望するのはこの手順がよりスムースに行えるかといことである。しかし既存の製品は前述の近距離通信やオフラインといった方法を採用しており、現場の要望を十分満たしているとはいいがたい。
TIFF
2025157350000001.tif
20
41
【課題を解決するための手段】
【0005】
各検知手段が搭載する時計の精度と、それらの時計の時刻制度については、時計の代わりに標準電波を用いることで解決できる。標準電波は日本国内の場合佐賀県と福岡県の2か所から送信されている。電波帯域としては60kHzと40kHzの2つを使用しておりラジオのFM波の帯域に含まれる。時刻信号の生成は短期間(1日以下)の周波数安定度に優れている水素メーザーと長期間(1日以上)の周波数安定度に優れているセシウム原子時計併用しており、1×10-12という驚異的な精度を実現しており、目標とする精度の十万分の一秒を十分満たしている。時計の代替となる精密な時刻信号は、人工衛星からも取得可能である。近年では米国のGPSの他にも各国がGNSS(Global Navigation Satellite System)衛星を打ち上げ、運用している。日本も準天頂衛星の「みちびき」の運用を開始しており現在は7基が稼働している。各検知手段間の距離の計測は、人工的に発生させる打鍵音を利用することで簡便かつ迅速に、さらには正確に行うことが可能になる。各検知手段には速度計あるいは加速度計が含まれている。そこで、これらを設置した状況で特定の速度計あるいは加速度計の近傍の管体に衝撃を加え振動を発生させて、それが到達した時間差を観測すれば、管体を伝わる弾性波速度が既知量であることから各検知手段間の距離が求められる。なお、この手法は用いるには全検知手段請求項1,あるいは2のような標準時刻や人工衛星からの電波を受信し、極めて正確な時刻信号情報を保持していることが前提となる。各検知手段と親機または解析用のパーソナルコンピューター間の通信には、水道の漏水検知に特化した場合、移動系防災行政無線で採用されている260MHz帯デジタル方式が利用可能である。移動系防災行政無線は従来150MHz帯及び400MHzを用いるアナログ方式で運用されていたが、平成13年度から260MHz帯デジタル方式が導入され、現在はこの方式への移行が進んでいる。デジタル化に伴い無線機能は高度化しており、多チャネル化、個別端末の直接呼出し、画像伝送等のデータ通信が可能となっている。
【発明の効果】
【0006】
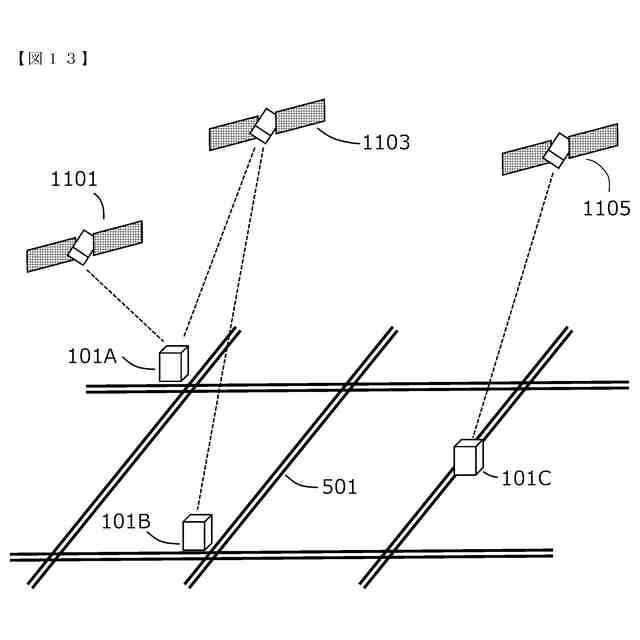
本発明の実施による効果は以下のようになる。まず、標準時刻電波の時刻信号の利用により、漏洩位置の正確な特定が迅速かつ安価に行える漏洩検知装置の実現がある。また、長波帯の標準時刻電波は世界各国で既に実用化されているため、いわゆるFMラジオの機能を検知手段に搭載しておけば海外でも即座に使用が可能となる利点がある。準天頂衛星「みちびき」は米国が運用しているGPS(Global Positioning System)を補完する役割を担うものとして日本が打ち上げ、運用を行っている。主目的は測位時間の短縮および測位精度を向上であり、衛星から送信されるデータフォーマットはGPSに準拠したものとなっている。衛星の軌道は図11の701に示す様に日本から赤道をまたぎ、オーストラリアまでを含む変形八の字形をしている。図11中の705は広域エリアの受信帯で、東経90度~180度、北緯60度~南緯60度の地域が該当する。703は日本近傍エリアの受信帯であり、東経110度~160度、北緯22度から60度の地位が該当する。日本近傍エリアでは仰角70度以上に常に1基以上の衛星が飛行しているようスケジューリングされており、すでに現在の運用状態でも高精度の時計信号源として十分活用できる。「みちびき」から発信される電波を時計信号源とし利用するメリットの一つが、同一信号源の確保である。例えばGPS信号を時計信号源とし利用すると想定し、検知手段を広範に設置した場合、全検知手段が必ず同一の衛星を捕捉する保証はなく、また電波状態によっては計測の途中で時計信号源を受信する衛星が切り替わってしまう可能がある。図13衛星の電波の捕捉例を示したものだが、図中の1101、1103、1105はそれぞれGPS衛星A、B、Cを表している。本図では検知手段Aは当初GPS衛星Aからの電波を受信したが、電波状況等の変化により途中からGPS衛星Bからの電波を受信するように切り替え、検知手段BはGPS衛星Bからの電波のみを受信し、同様に検知手段CはGPS衛星Cからの電波のみを受信した場合を示している。このような受信状態では同一の信号源を確保しているとは言い難い。GPSを始めとしたGNSS衛星はルビジウムやセシウムを使用した原子時計を内蔵しており時刻の精度は極めて高く、また地上基地から定期的に世界標準時刻への校正が行われている。しかし個々の衛星の時計精度が優れていても、複数の衛星同士間での精度の保証はない。本発明の根幹は全検知手段が同一の時刻信号源を有していることであり、例えその時刻自体が地上時刻と一致していなくても大きな問題はない。このため、同一の衛星からの電波を全検知手段が受信できる可能性が極めて高い「みちびき」の利用が重要になる。「みちびき」を利用するもうひとつメリットはその高仰角である。図15は検知手段が直接は見通せない衛星の電波を、反射波として受信してしまった事例を示している。図で示した事例以外にも、屈折や回析による直接波以外の電波を受信することもある、電波の速度が光速であることを考慮すれば直接波との伝搬距離の差が時計精度に与える影響はわずかなものだが、できる限り時刻精度を高めるためには、このような状況は避けたい。市販の衛星受信機の中には直接波以外の電波の受信を除外する機能を有した製品もあるが、機構が複雑で当然コストが高くなる。「みちびき」は仰角が70度以上と非常に高いため、狭隘な谷間や、高層建築群の中でも直接波を受信できる機会が増え受信器の低コスト化につながる。打鍵音により各検知手段間の距離を正確に計測すれば、路上で巻き尺等を使用した計測作業が一切不要となり、検知手段の設置範囲を広範にとることも容易になる。また、検知手段の位置を移動させてトライアンドエラーの様な形で漏洩個所を絞り込んでいく際にも検知手段間の距離の再計測の手間が一切なくなるため、作業効率が飛躍的に向上する。デジタル化された防災行政無線の疎通範囲はかなり広域に及ぶため、規格に沿った通信装置を使用すれば電波障害等の影響を考慮することなく、各検知手段と解析用パーソナルコンピューター間のデータの伝送が速やかに行える。さらには、無線基地局で各検知手段からの信号を集約すれば、漏洩監視センターのような常設の設備の運用にまで発展させることも可能である。なお、これらの設備にかかる経費や維持費は既に無線インフラが整備されている市区町村については検知手段に装備する通信装置の費用のみで済むというメリットがある。
【図面の簡単な説明】
【0007】
漏水検知装置の一般的な構成および原理を説明する概略図
漏洩により発生した弾性波データの波形の概略図
管路上の漏洩地点および推定された地点と掘削範囲の概略図
直線状に検知手段を配置した場合の各検知手段間の距離の概念図
回廊上の管路に検知手段を配置した場合の各検知手段間の距離の概念図
準天頂衛星「みちびき」の軌道図
検知手段が複数の衛星から電波を受信する場合の概念図
検知手段が衛星からの直接波と反射波を受信する場合の概念図
標準時刻電波の出力フォーマット
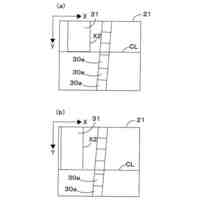
検知手段間の取得データの時間軸合わせの概念図
衛星からの電波受信手順の概念図
衛星からの送信データイメージ
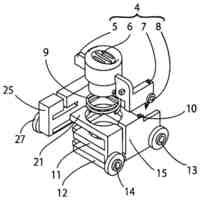
打鍵音発生装置の概念図
漏洩地点解析中のコンピュータ画面イメージ
【発明を実施するための形態】
【0008】
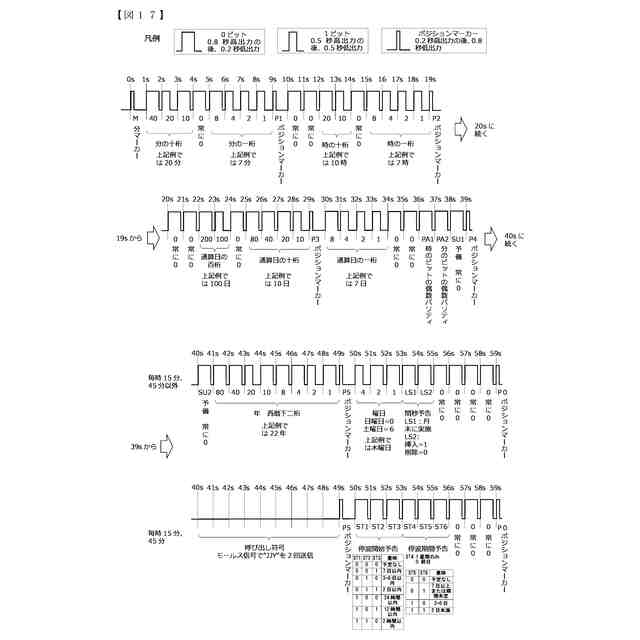
図17は、現在国内で使用されている標準時刻電波の出力フォーマットである。標準時刻電波の出力状態としては、高出力と低出力の二種類のみで、これで3種類の長さのパルス派を形成し、1秒ごとに送信している。パルス長は高出力0.8秒、0.5秒、0.2秒の3種類が存在し、それぞれ、0ビット、1ビット、マーカーを意味する。通常、マーカーは十秒おきに発信されるが、毎分59秒と正分0秒には2回連続して出力される。マーカーとあらかじめ予約されているビット以外には全てパルス長によるビットごとに意味のある数値が割り当てられおり、1ビットのパルス長が観測された場合は割り当てられた数値を加算する。標準時刻電波はこのようにして、1分間に射出される60回のパルスに年月日時分の情報を含めて送信している。つまり、最低2分間の標準時刻電波の観測を行えば、各パルスがどの年月日時秒を意味しているかの判定が可能となる。標準時刻電波の各パルスが、いずれの年月日のどの時刻を示しているかが明らかになることにより、各検知手段で得られた観測データの自系列的な補正が(あるいは同定)が可能となる。図19はデータ補正の概念図である。検知手段A及びBで測定されたデータについて検知手段Bで測定されたデータを時間軸方向に補正することにより検知手段Aで測定されたデータに時刻を揃える手順を示している。この補正後、A、B両検知手段間のデータの相関等を計算することにより、本発明が目指す誤差0.1m以内での漏水箇所の特定が可能となる。みちびき衛星はGPSを補完するために運用されており、その主目的は地球上の位置の特定である。GPSよる地上での位置の特定原理については、本発明とは無関係なので割愛するが、地上での位置を特定するためには同時に最低4基の衛星を捕捉する必要がある。このため、みちびき及びGPS衛星は地上への情報発信に際し、すべての衛星が同一の周波数帯の電波を使用するCDMA(Code Division Multiple Access 符号分割多元接続)方式を採用している。このCDMA方式を採用することにより単一の形式の受信装置ですべての衛星からの電波の受信が可能となっており、送受信装置の回路の規模の縮小やアンテナ構造の単一化等のコスト削減に寄与している。みちびき及びGPS衛星は地上に送出する情報を各衛星に割り当てられたPRN(Pseudo Random Noise code)コードと呼ばれる疑似ランダム符号で符号化処理を行った後に、電波として放出している。よって、特定の衛星の情報の抽出は受信した電波を、目的とする衛星のPRNコードのレプリカを使用して復号化することにより可能となる。(図21)衛星から受信した電波情報の復号に成功すると、GPSの航法メッセージと言われる図23に示した概念のデータが取得できる。GPSの航法メッセージは5つのサブフレームから構成されるフレームという単位が全てとなり、1つのフレームを送信し終えると時系列変化により更新されたフレーム情報を再度送信する、といことを衛星は繰り返し行っている。フレームには衛星の位置や健康状態、時刻の補正係数、他の全衛星の概要情報などが含まれるが、本発明とは関係ないので、時刻情報に関する部分以外の説明は割愛する。1つのサブフレームは300bitで構成され、地上ではこれを6秒かけて受信する。サブフレームの先頭は必ずTLM(Telemetry Word)とそれに引き続くHOW(Hand Over Word)が含まれている。TLMの先頭8bitはPreambleと言われており、2024年7月時点での運用では “10001011”固定されている。HOWの先頭17bitはTOW-COUNT MESSAGE呼ばれる直前の日曜日の0時を起点とする6秒単位の時間であり、次のサブフレームが送信される時刻を示している。第一フレームの先頭10bitはWeek Numberで、2019年4月7日からの週番号となっている。これらの情報から、地上の検知手段は現在受信している西暦、月日、時刻を取得することが可能となる。なお秒パルスについては搬送波にロックし、その位相の反転を検知し生成したほうがより高精度となる。また、標準時刻電波の前半30秒は国際的に共通の仕様であるため、国外での使用を考慮し、標準時刻電波の形式に変換する際には、時刻情報が衛星電波であることの識別子として、1分データ中の後半30秒のマーカー以外の任意の部分に「GNSS」等のコードをモールス信号形式等2進化した形で埋め込む。十万分の一秒単位の弾性波データを例えば8ビットの分解能で取得した場合、一秒間に取得するデータ量は800Kビットとなる。これに時刻信号を加えるのだが、標準時刻電波は高出力と低出力の二状態しかないため、1ビットで表現可能である。ただしパルスの立ち上がりの55%値が標準時の1秒信号となっているため、データの取得は8ビット程度で行い、最低値と、最高値の55%をしきい値に送信前に1ビット化を行うのが適切である。8ビットの弾性波データと時刻信号データを合わせて1検知手段につき毎秒900Kビットしてのデータ量になる。現在の技術でデータを圧縮して平均5分の1程度の容量180Kビットにできたとしても、現行の防災行政無線のデータ通信の仕様である25.6kbit/secではリアルタイムに送受信することはできない。このため各検知手段の内部に一時記憶装置を装備して、これに蓄えたデータを順次解析用のパーソナルコンピューターに送信するような機構とする。打鍵音を発生させるには、管体やその付属物に物理的な衝撃を与えれば十分で、人力によっても構わないが、距離の精度を高めるたには検知手段の有する速度、あるいは加速度センサの極力近傍で発生させるのが効果的である。また、打鍵時に加える力にばらつきがあるとセンサで捉えられる弾性波データの範囲が広くなり、到達時刻の判定が煩雑になるため、均一な力で衝撃を与えることが望ましい。さらに圧力管やその付属物に損傷を与えない範囲で打撃を加えることが求められるため、打鍵専用の装置を用意することも考えられる。図25は打鍵装置のイメージ図である。機構は極めて単純でモーター等の動力で錘を吊り上げ、一定の高さから自由落下させ管体や付属物に衝撃を与えるものである。ただし、ガス管の場合は発火の危険性があるため、錘を金属製にする場合は先端部を樹脂等で覆う必要がある。
【実施例】
【0009】
検知手段が可搬式の装置の場合、現状利用可能な技術を活用して、本発明を実施した場合を想定した解析用パーソナルコンピューターの操作画面の例が図27である。検知手段との通信に防災行政無線や、事業者に業務用として割り当てられている無線帯域を使用するため、各検知手段に1つずつのチャンネルを割り当てることができないケースもあり得る。また、現状の技術レベルの無線速度では計測データをリアルタイムで送信できないため、データの計測は終えたものの、図27のように「転送中」や「待機中」といった状態が発生することが考えられる。
【産業上の利用可能性】
【0010】
本発明は、既存の可搬型の多点式漏洩検知装置をコスト面、測定精度、測定から解析に要する時間の点において凌駕しており、単純に代替するのみでも十分な導入効果が期待できる。本発明は、漏洩を検知する対象が圧力管であれば適用することができるため上水道やガス等の配管以外にも、精油や化学薬品製造のプラントをはじめ、圧力管を使用しガスあるいは液状のものを製造する工場等、応用可能な産業の範囲の広さの潜在性はかなり高いといえる。さらに、検知手段を管体外部に装着する方式なので、既存の配管設備に一切手を加えることがないので、漏洩箇所特定機構を低コストかつ短期間に導入できる。また、プラントや工場内のような専用の敷地内の配管であれば道路下のものと異なり、検知手段と解析用パーソナルコンピューター間の通信を、伝送速度がより高速な有線にし、さらに検知手段の駆動に必要な電力を、電池によらず電力線で供給することも容易なため、常時観測及び解析が可能になりさらに本発明の導入による効果が向上することも期待できる。プラント外でも重要なライフラインの基幹路線等を中心に検知手段を常設し、常時集中監視を行うことで平時はもとより、震災等の自然災害発生後の緊急の点検や損傷個所の迅速な特定が可能になる。
【符号の説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
8日前
個人
アクセサリー型テスター
1日前
個人
高精度同時多点測定装置
今日
日本精機株式会社
位置検出装置
14日前
日本精機株式会社
位置検出装置
14日前
日本精機株式会社
位置検出装置
14日前
ユニパルス株式会社
ロードセル
7日前
大和製衡株式会社
組合せ秤
19日前
大和製衡株式会社
組合せ秤
19日前
アズビル株式会社
圧力センサ
13日前
トヨタ自動車株式会社
監視装置
6日前
株式会社チノー
放射光測温装置
7日前
株式会社ヨコオ
ソケット
7日前
株式会社ヨコオ
ソケット
6日前
トヨタ自動車株式会社
検査装置
16日前
エイブリック株式会社
磁気センサ回路
13日前
ダイキン工業株式会社
監視装置
5日前
株式会社ユーシン
操作検出装置
16日前
株式会社東芝
センサ
19日前
株式会社東芝
センサ
19日前
東レエンジニアリング株式会社
計量装置
16日前
長崎県
形状計測方法
1日前
TDK株式会社
磁気センサ
6日前
TDK株式会社
ガスセンサ
12日前
TDK株式会社
ガスセンサ
13日前
株式会社ナリス化粧品
角層細胞採取用具
26日前
TDK株式会社
ガスセンサ
7日前
株式会社東芝
重量測定装置
12日前
三菱マテリアル株式会社
温度センサ
8日前
日本特殊陶業株式会社
センサ
5日前
ダイハツ工業株式会社
移動支援装置
6日前
株式会社熊谷組
RI計測装置
14日前
中国電力株式会社
電柱管理システム
5日前
中国電力株式会社
異常箇所検出装置
27日前
多摩川精機株式会社
冗長エンコーダ
6日前
三恵技研工業株式会社
融雪レドーム
6日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ