TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025155454
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024066424
出願日
2024-03-28
発明の名称
形状計測方法
出願人
長崎県
代理人
個人
,
個人
,
個人
主分類
G01B
11/24 20060101AFI20251002BHJP(測定;試験)
要約
【課題】 形状測定機が振動や外乱光の影響を受けた際に、測定対象の形状を正確に測定することを可能にする。
【解決手段】 旋回するレーザー計測装置2を測定位置に設けるとともに、前記レーザー計測装置の変位の周期の整数倍とレーザー計測装置の回転周期が等しくなるようレーザー計測装置の回転速度を調整したうえで、レーザー計測装置が1周した際の実測距離bと測定間隔ωを関係式に代入して複数の一次方程式をつくり連立一次方程式とし、この連立一次方程式を解くことにより補正距離xを得る。また、バラツキが小さく、高解像度である修正距離を算出する。
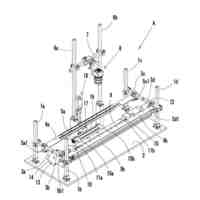
【選択図】図6
特許請求の範囲
【請求項1】
所定空間の外周を囲むように環状に一個又は複数の構造部材が配置され、しかも同構造部材の前記空間に臨む表面が乱反射面である構造体であって且つ同構造体又はレーザー計測装置が振動又は揺れによって相対的に変位している状態での構造体の形状を正確に計測する計測法であって、下記のステップ1,2,3の手順で実行する形状計測方法。
ステップ1:レーザー光をレーザー計測装置のレーザー投光器から測定物に向けて投光して、その投光した測定物の投光スポットからの反射光を受信して、前記レーザー投光器の投光位置から投光スポット位置までの実測距離bを計測して、それらの値を記憶出力できるレーザー計測装置を前記空間内に設置し、
ステップ2:設置した前記レーザー計測装置のレーザー投光方向を、測定間隔ωで1周360°又は複数周m(0~360°×m)旋回させ、その時の実測距離b
m
(kω)k=1,2,3・・・n m=1,2,3・・・を実測し、コンピュータを用いた記憶計算部に前記投光角kω,k=1,2,3・・・nとその時の前記実測距離b
m
(kω)k=1,2,3・・・n m=1,2,3・・・とを関連付けて記憶させる。
ステップ3:前記記憶計算部に記憶させた前記実測距離b
m
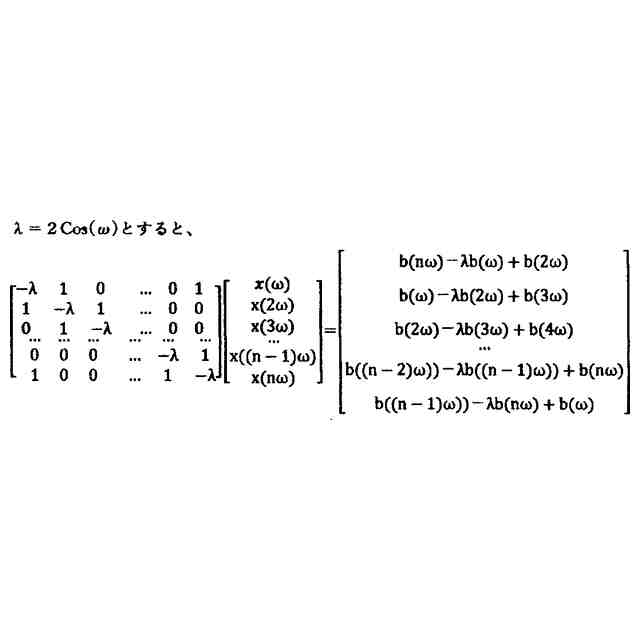
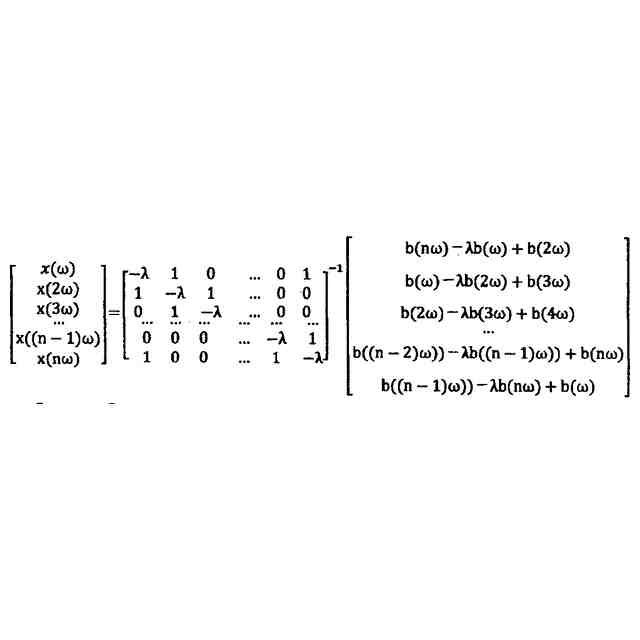
(kω)k=1,2,3・・・n m=1,2,3・・・,前記kω k=1,2,3・・・nのデータを記憶計算部にある記憶している下記数7の数式に代入して、データを代入した複数の下記数7の連立一次方程式を解いて極座標系で構造体の形状を示す補正距離x(kω) k=1,2,3・・・nと投光角kω k=1,2,3・・・nを出力できるようにする。
TIFF
2025155454000017.tif
20
112
続きを表示(約 440 文字)
【請求項2】
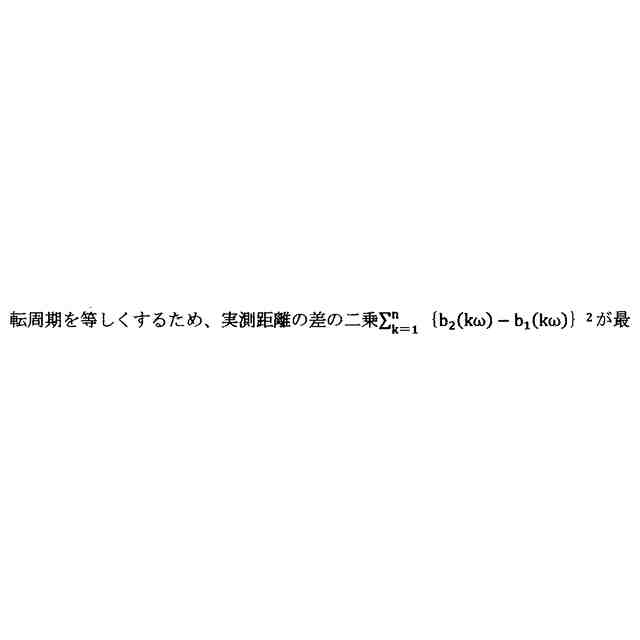
ステップ1からステップ2に移行する前にレーザー計測装置に作用する変位の周期の整数倍とレーザー計測装置の回転周期を等しくするため、
TIFF
2025155454000018.tif
10
151
隔ωの値を決定し、決定した測定間隔ωを使用した実測距離b
m
(kω)を使用して前記数7を解いて、極座標系で構造体の形状を示す補正距離x(kω)k=1,2,3・・・nと投光角kω k=1,2,3・・・nを出力する請求項1記載の形状計測方法。
【請求項3】
レーザー計測装置の投光角がm周目であり、レーザー計測装置が投光角kωに位置する時の補正距離をx
m
(kω)とすると、バラツキが小さく、高解像度である
TIFF
2025155454000019.tif
11
152
きることを特徴とする請求項1又は2いずれか記載の形状測定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、不動産の室内区画壁の形状の測定、又は不動産の外観の形状の測定も可能である。又は大型工業製品の形状の測定にも利用できる。
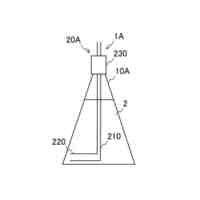
本発明は、測定位置から視野できる構造体(以下単に構造体という)の形状を測定位置から構造体に対してレーザー光を照射してその反射光が返ってくるまでの時間により測定位置から構造体までの距離を計測できるレーザー計測装置を測定位置に設置して、これを旋回させることにより構造体の形状を正確に計測できるようにする形状測定機に関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
測長機能として、レーザー計測装置を使用した場合、レーザー光を照射し、測定対象の構造体に当たって跳ね返ってくるまでの時間を計測することで、構造体と測長機能までの距離を測定し、このレーザー計測装置を旋回させることにより構造体の三次元点群を生成できる形状測定機は、既存技術として存在する。
【0003】
しかし、この既存技術では、ドローンや自動車などの移動体に取り付けた際に、移動体が移動していなくても、移動体の振動等により設置したレーザー計測装置に変位がある場合、この変位が形状の測定結果に悪影響を与える。また、外乱光の影響を受け、測定長にバラツキが生じるという欠点があった。
【0004】
正確な構造体の形状を測定するための改善策として、特許文献1の特開2023-095252号公報記載の発明のとおり、受信機による衛星測位データや慣性計測装置による慣性計測データを用いて、時間ごとの形状計測機の位置・姿勢を算出することが考えられるが、受信機や慣性計測装置が必要となり、コスト高となるという問題点があった。
【先行技術文献】
【特許文献】
【0005】
特開2023-095252号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本願発明が解決しようとする課題は、測定位置に振動が発生している場合又は外乱光の影響を受ける場合に形状・寸法に計測誤差が生じることの欠点を抑えてより正確な測定物の形状を測定できるようにすることにある。
【課題を解決するための手段】
【0007】
かかる課題を解決した本発明の構成は、
1) 所定空間の外周を囲むように環状に一個又は複数の構造部材が配置され、しかも同構造部材の前記空間に臨む表面が乱反射面である構造体であって且つ同構造体又はレーザー計測装置が振動又は揺れによって相対的に変位している状態での構造体の形状を正確に計測する計測法であって、下記のステップ1,2,3の手順で実行する形状計測方法
ステップ1:レーザー光をレーザー計測装置のレーザー投光器から測定物に向けて投光して、その投光した測定物の投光スポットからの反射光を受信して、前記レーザー投光器の投光位置から投光スポット位置までの実測距離bを計測して、それらの値を記憶出力できるレーザー計測装置を前記空間内に設置し、
ステップ2:設置した前記レーザー計測装置のレーザー投光方向を、測定間隔ωで1周360°又は複数周m(0~360°×m)旋回させ、その時の実測距離b
m
(kω)k=1,2,3・・・n m=1,2,3・・・を実測し、コンピュータを用いた記憶計算部に前記投光角kω,k=1,2,3・・・nとその時の前記実測距離b
m
(kω)k=1,2,3・・・n m=1,2,3・・・とを関連付けて記憶させる
ステップ3:前記記憶計算部に記憶させた前記実測距離b
m
(kω)k=1,2,3・・・n m=1,2,3・・・,前記kω k=1,2,3・・・nのデータを記憶計算部にある記憶している下記数7の数式に代入して、データを代入した複数の下記数7の連立一次方程式を解いて極座標系で構造体の形状を示す補正距離x(kω) k=1,2,3・・・nと投光角kω k=1,2,3・・・nを出力できるようにする
TIFF
2025155454000002.tif
18
110
2) ステップ1からステップ2に移行する前にレーザー計測装置に作用する変位の周期の整数倍とレーザー計測装置の回転周期を等しくするため、
TIFF
2025155454000003.tif
12
151
隔ωの値を決定し、決定した測定間隔ωを使用した実測距離b
m
(kω)を使用して前記数7を解いて、極座標系で構造体の形状を示す補正距離x(kω)k=1,2,3・・・nと投光角kω k=1,2,3・・・nを出力する前記1)記載の形状計測方法
3) レーザー計測装置の投光角がm周目であり、レーザー計測装置が投光角kωに位置する時の補正距離をx
m
(kω)とすると、バラツキが小さく、高解像度
TIFF
2025155454000004.tif
12
151
表示できることを特徴とする前記1)又は2)いずれか記載の形状測定方法にある。
【0008】
本発明では、レーザー光の投光方向が回転するように変向できる機能を有し、投光波・受光波からその投光スポット位置までの距離を計測できるレーザー計測装置を用い、1周毎にω°ずつn=360°/
ω°回測定させる。その際に実測距離b
m
(kω)k=
1,2・・・nを得ることができ、構造体の形状が不変であるとして成立する
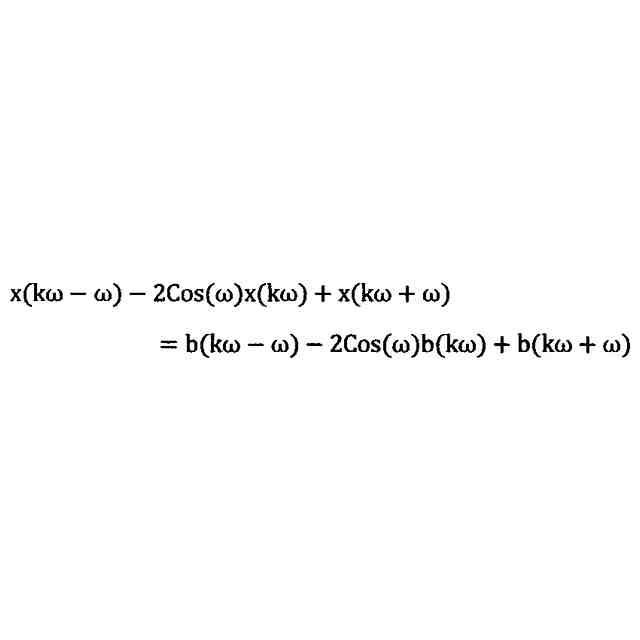
関係式x(kω-ω)-2Cos(ω)x(kω)+x(kω+ω)=b(kω-ω)-2Cos(ω)b(kω)+b(kω+ω)にω,kω,b(kω-ω),b(kω),b(kω+ω)を代入して連立一次方程式をつくり、この連立一次方程式をコンピュータを用いた記憶計算部で解くことにより補正距離x(kω)k=1,2・・・nを得て、構造体の形状を補正距離xで算出する。
本発明は、上記実測距離bの取得に向けて、レーザー計測装置の変位の周期
TIFF
2025155454000005.tif
10
150
b
1
(kω)}
2
が最小となるように、レーザー計測装置の投光角速度dω/dtと測定間隔ωを設定する。ここで、1周目の実測距離をb
1
(kω)k=1,2・・・nとし、2週目の実測距離をb
2
(kω)k=1,2・・・nとする。
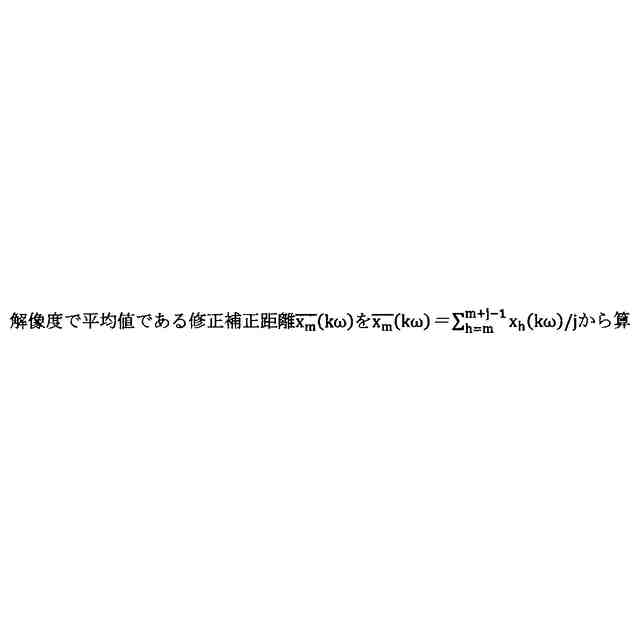
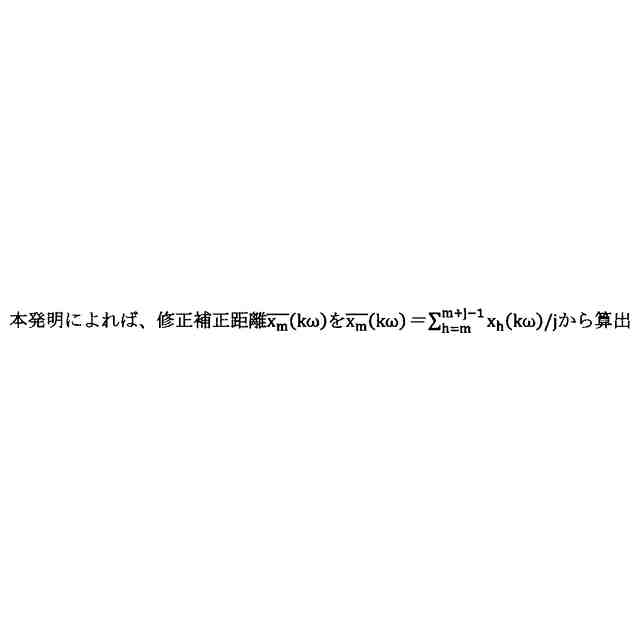
本発明は、レーザー計測装置の投光角がm周目であり、レーザー計測装置が投光角kωに位置する時の補正距離をχ
m
(kω)とすると、バラツキが小さく、高
TIFF
2025155454000006.tif
11
152
出することを特徴とする。ここで、jは任意の正の数とする。
【発明の効果】
【0009】
このようにして、構造体の形状は極座標値である補正距離x(kω) k=1,2,3・・・nと投光角kω k=1,2,3・・・nの点群によって具体的数値と形状が求められる。この補正距離xはレーザー計測装置の実測距離b(kω)k=1,2,3・・・nを補正して、レーザー計測装置の変位・振動の影響を少なくした形状表現である。
TIFF
2025155454000007.tif
10
153
すると外乱光によるバラツキを避けることができる。
よって、本発明の形状測定機は、設置したレーザー計測装置に対する振動や外乱光の影響を排除した正確な構造体の形状を得ることができるという利点がある。
【図面の簡単な説明】
【0010】
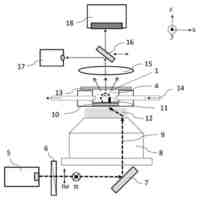
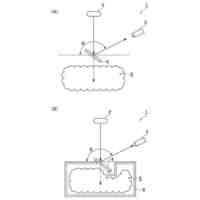
図1は、本願発明の実施例で、形状測定機を用いて形状を測定する状況を示した説明図である。
図2は、実施例の測長機能あるレーザー計測装置2の投光角速度を調整した結果、1周目の実測距離と2週目の実測距離が重なることを示した説明図である。
図3は、実施例の実測距離b(kω)と変位影響を排除した補正距離x(kω)との関係を示した説明図である。
図4は、実施例の実測距離b(kω-ω)と変位影響を排除した補正距離x(kω-ω)との関係を示した説明図である。
図5は、実施例の実測距離b(kω+ω)と変位影響を排除した補正距離x(kω+ω)との関係を示した説明図である。
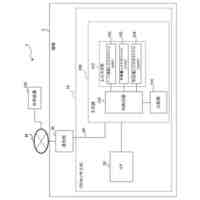
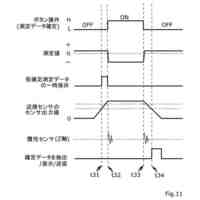
図6は、実施例の形状計算までの作業手順及び演算処理行程を示す形状算出までの行程フロー図である。
図7は、変位した形状測定機を用いて得た実測距離b(ω)を使用して表示した構造体の形状(a)と、本願発明の実施例を用いて得た補正距離x(ω)を使用して表示した構造体の形状(b)との比較図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
長崎県
形状計測方法
1か月前
長崎県
光散乱体の非破壊測定装置
1か月前
長崎県
水素ガスの検知方法及び検知装置
10か月前
長崎県
生物学的検体の分析方法及び検体回収容器の再生方法
1か月前
学校法人 工学院大学
判定回路、及び制御システム
4か月前
個人
竹粉による平茸菌床栽培法及び平茸菌床並びに平茸
20日前
国立大学法人九州大学
遺伝子発現増強剤
4か月前
戸田建設株式会社
スパー型洋上風力発電設備の建造方法
10か月前
戸田建設株式会社
スパー型洋上風力発電設備の建造方法
11か月前
AGCセラミックス株式会社
造形体、釉薬層付き造形体、及び造形体の製造方法
5か月前
学校法人明治大学
アスパラガスの栽培方法および該栽培方法に用いられる液状マルチ剤
5か月前
日本精機株式会社
検出装置
20日前
個人
採尿及び採便具
26日前
個人
高精度同時多点測定装置
1か月前
個人
アクセサリー型テスター
1か月前
個人
計量機能付き容器
15日前
株式会社ミツトヨ
測定器
1か月前
甲神電機株式会社
電流検出装置
20日前
株式会社カクマル
境界杭
5日前
アズビル株式会社
電磁流量計
1か月前
トヨタ自動車株式会社
監視装置
1か月前
ダイキン工業株式会社
監視装置
1か月前
大成建設株式会社
風洞実験装置
15日前
大和製衡株式会社
組合せ計量装置
29日前
日本特殊陶業株式会社
ガスセンサ
13日前
愛知時計電機株式会社
ガスメータ
1か月前
個人
非接触による電磁パルスの測定方法
18日前
双庸電子株式会社
誤配線検査装置
21日前
ローム株式会社
半導体装置
1か月前
個人
計量具及び計量機能付き容器
15日前
長崎県
形状計測方法
1か月前
個人
システム、装置及び実験方法
1か月前
大和製衡株式会社
組合せ計量装置
29日前
TDK株式会社
磁気センサ
1か月前
日本信号株式会社
距離画像センサ
18日前
愛知電機株式会社
軸部材の外観検査装置
29日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ