TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025156799
公報種別
公開特許公報(A)
公開日
2025-10-15
出願番号
2024059475
出願日
2024-04-02
発明の名称
X線測定システム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
G01N
23/205 20180101AFI20251007BHJP(測定;試験)
要約
【課題】X線を測定するための筐体を被測定物に対して適切な位置に容易に移動できるX線測定システムを提供する。
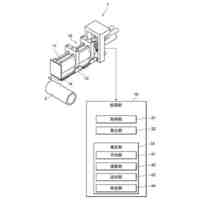
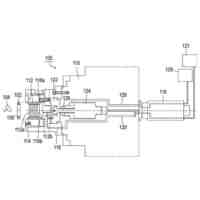
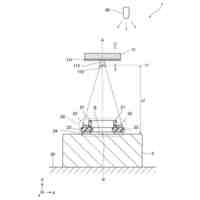
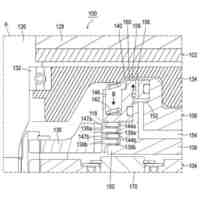
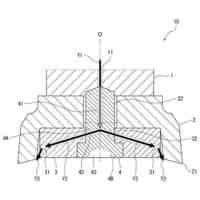
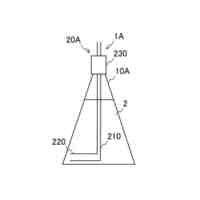
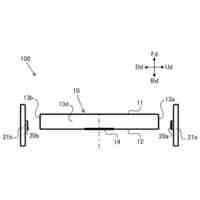
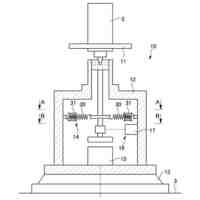
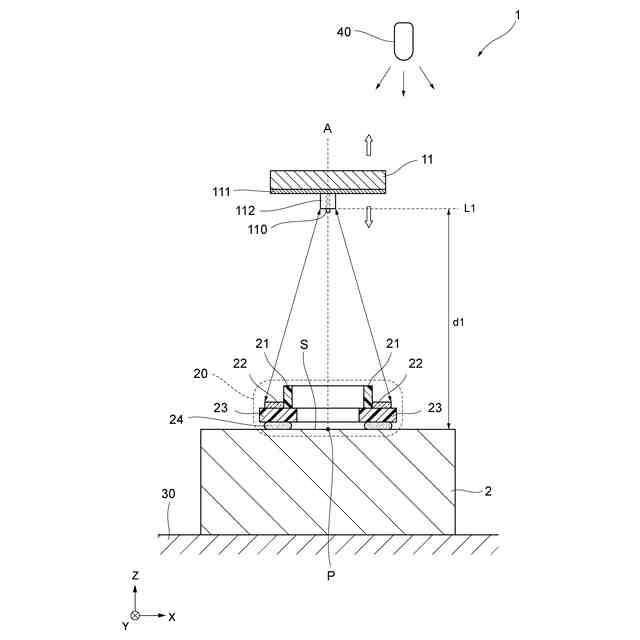
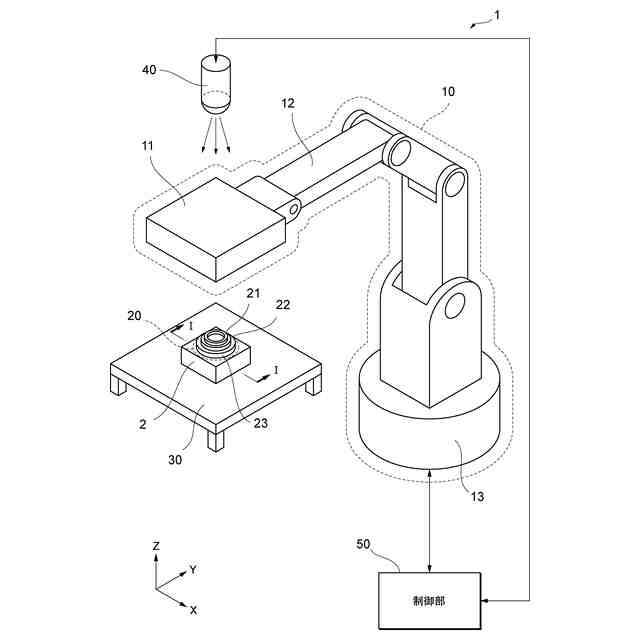
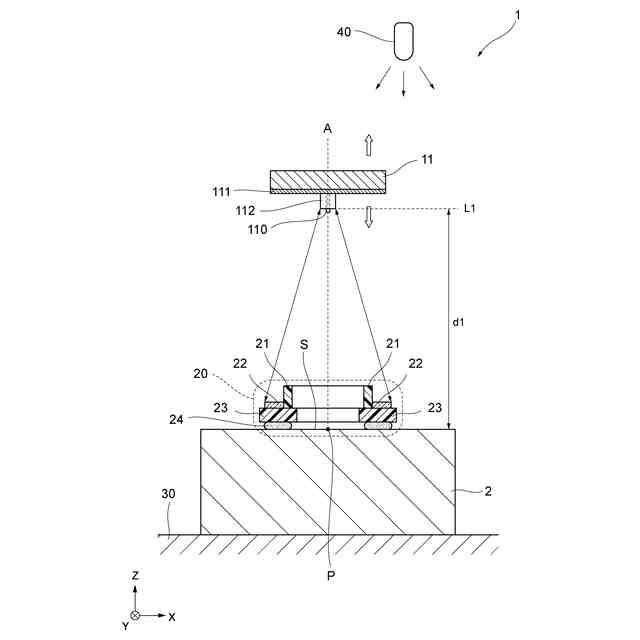
【解決手段】X線測定システム(1)は、被測定物(2)の測定面に対して所定の距離となる位置に移動可能な筐体(11)と、測定面上にある測定点の周囲を囲うように円筒状に形成され測定面上に設けられる遮光部(21)と、遮光部の外周に接続され遮光部の外側方向に向かって延在するように輪状に形成されている再帰反射部(22)と、筐体に設けられ測定面に向かって光を照射し再帰反射部によって反射された光を検出する光電センサ(112)と、光電センサによる検出に基づいて筐体を設定位置に移動させる制御部(50)と、測定面に向かってX線を照射する照射部(112)と、被測定物を回折したX線を測定する測定部(111)とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
被測定物に関する測定面に対して所定の距離となる位置に移動可能な筐体と、
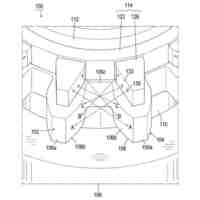
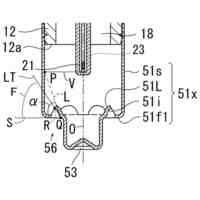
前記測定面上にある測定点の周囲を囲うように円筒状に形成され、前記測定面上に設けられる遮光部と、
前記遮光部の外周に接続され、前記遮光部の外側方向に向かって延在するように輪状に形成されている再帰反射部と、
前記筐体に設けられ、前記測定面に向かって光を照射し、前記再帰反射部によって反射された光を検出する光電センサと、
前記光電センサによる検出に基づいて前記筐体を設定位置に移動させる制御部と、
前記測定面に向かってX線を照射する照射部と、
前記被測定物を回折したX線を測定する測定部と、
を備えるX線測定システム。
続きを表示(約 520 文字)
【請求項2】
前記制御部は、前記筐体を前記被測定物に対して前記測定面の法線方向に沿って近づけるように移動させた場合に、前記再帰反射部によって反射された光が前記遮光部に遮られ前記光電センサに入射しなくなる位置を前記設定位置として設定し、前記設定位置に前記筐体を移動させる請求項1に記載のX線測定システム。
【請求項3】
前記制御部は、前記筐体が前記設定位置に位置した状態で、X線を照射するように前記照射部の動作を制御し、X線を測定するように前記測定部の動作を制御する請求項2に記載のX線測定システム。
【請求項4】
前記被測定物、前記再帰反射部及び前記遮光部を撮像する撮像部をさらに備え、
前記制御部は、前記撮像部が撮像した画像に対して画像処理を行うことによって、前記測定面と前記筐体との間の距離を検出する請求項2又は3に記載のX線測定システム。
【請求項5】
中心において前記測定面が露出するように輪状に形成されており、上面に前記再帰反射部及び前記遮光部が接続され、底面が粘着剤によって前記測定面に着脱可能に接続される板部をさらに備える請求項1に記載のX線測定システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、X線測定システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来から、X線の回折現象を利用して被測定物の残留応力や半価幅、残留オーステナイト量等を測定するX線測定システムが知られている。
【0003】
これに関し、特許文献1には、被測定物に向けてX線を出射するX線出射器と、被測定物を回折したX線を受光し回折環を形成する回折環形成手段と、可視光を出射する可視光射出器とを有する筐体が開示されている。また、特許文献1には、当該筐体が先端に取り付けられたアーム型ロボットを備えるX線回折測定装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第6600928号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、ロボットのアームの先端に設けられたX線測定用の筐体を被測定物に対して適正な位置に移動させるための教示を行う際、ロボットの操作に習熟した操作者が必要であり、操作が可能な作業者が限られてしまうという問題があった。また、特許文献1に記載の技術では、被測定物に対するロボットのアームの位置決定のための教示に時間がかかり、さらに決定した位置の確からしさを確認する必要があるという問題があった。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、X線を測定するための筐体を被測定物に対して適切な位置に容易に移動できるX線測定システムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のX線測定システムは、被測定物に関する測定面に対して所定の距離となる位置に移動可能な筐体と、前記測定面上にある測定点の周囲を囲うように円筒状に形成され、前記測定面上に設けられる遮光部と、前記遮光部の外周に接続され、前記遮光部の外側方向に向かって延在するように輪状に形成されている再帰反射部と、前記筐体に設けられ、前記測定面に向かって光を照射し、前記再帰反射部によって反射された光を検出する光電センサと、前記光電センサによる検出に基づいて前記筐体を設定位置に移動させる制御部と、前記測定面に向かってX線を照射する照射部と、前記被測定物を回折したX線を測定する測定部とを備える。
【0008】
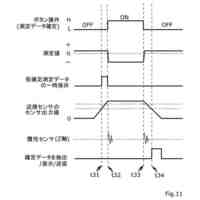
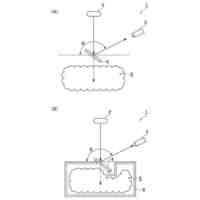
また、前記制御部は、前記筐体を前記被測定物に対して前記測定面の法線方向に沿って近づけるように移動させた場合に、前記再帰反射部によって反射された光が前記遮光部に遮られ前記光電センサに入射しなくなる位置を前記設定位置として設定し、前記設定位置に前記筐体を移動させる。
【0009】
また、前記制御部は、前記筐体が前記設定位置に位置した状態で、X線を照射するように前記照射部の動作を制御し、X線を測定するように前記測定部の動作を制御する。
【0010】
また、本発明のX線測定システムは、前記被測定物、前記再帰反射部及び前記遮光部を撮像する撮像部をさらに備え、前記制御部は、前記撮像部が撮像した画像に対して画像処理を行うことによって、前記測定面と前記筐体との間の距離を検出する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
流路切換弁
1日前
株式会社不二越
エンドミル
22日前
株式会社不二越
X線測定装置
22日前
株式会社不二越
歯車加工装置
17日前
株式会社不二越
歯車加工装置
17日前
株式会社不二越
歯車加工装置
17日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
噛み込み検知装置
1か月前
株式会社不二越
回転駆動システム
3日前
株式会社不二越
垂直多関節ロボット
9日前
株式会社不二越
斜板式ピストンポンプ
1か月前
株式会社不二越
固定構造および固定治具
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社不二越
ダイヤモンド膜の密着性能評価方法
3日前
株式会社不二越
超硬合金およびこれを用いた切削工具
1か月前
株式会社不二越
センサシステム及びロボットシステム
1か月前
株式会社不二越
歯切工具用部品およびそれを用いた歯切工具
1日前
株式会社不二越
直動軸受用合金鋼およびそれを用いた直動軸受
1か月前
株式会社不二越
冷間金型用合金鋼およびそれを用いた冷間金型
1か月前
個人
採尿及び採便具
1か月前
日本精機株式会社
検出装置
24日前
個人
計量機能付き容器
19日前
株式会社ミツトヨ
測定器
1か月前
株式会社カクマル
境界杭
9日前
甲神電機株式会社
電流検出装置
24日前
日本精機株式会社
発光表示装置
2日前
株式会社トプコン
測量装置
1日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
19日前
愛知時計電機株式会社
ガスメータ
1か月前
日本特殊陶業株式会社
ガスセンサ
17日前
双庸電子株式会社
誤配線検査装置
25日前
日本信号株式会社
距離画像センサ
22日前
個人
非接触による電磁パルスの測定方法
22日前
個人
システム、装置及び実験方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ