TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099434
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216098
出願日
2023-12-21
発明の名称
自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラム
出願人
SEQSENSE株式会社
,
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
G05D
1/69 20240101AFI20250626BHJP(制御;調整)
要約
【課題】複数の自律ロボットがそれぞれタスクを実施するシステムにおいて、自律ロボット同士の相互干渉を簡易に防ぐ。
【解決手段】自律ロボットシステムは、第1自律ロボットに対するタスク要求に基づき、前記第1自律ロボットを制御するように構成された処理回路を備える。前記処理回路は、前記タスク要求の発生中に他ロボット情報について所定の不許可条件が成立するか否かを判定することと、前記タスク要求の発生中に前記不許可条件が成立しないと判定されると、前記第1自律ロボットに前記タスクの実施を許可することと、前記タスク要求の発生中に前記不許可条件が成立すると判定されると、前記第1自律ロボットに前記タスクの実施を待機させることと、を行う。
【選択図】図1
特許請求の範囲
【請求項1】
第1自律ロボット及び第2自律ロボットを含む複数の自律ロボットがそれぞれタスクを実施する自律ロボットシステムであって、
前記第1自律ロボットに対するタスク要求に基づき、前記第1自律ロボットを制御するように構成された処理回路を備え、
前記処理回路は、
前記第2自律ロボットの位置を示す位置データと、前記第2自律ロボットのステータスを示すステータスデータと、を含む他ロボット情報を取得することと、
前記タスク要求の発生中に前記他ロボット情報について所定の不許可条件が成立するか否かを判定することと、
前記タスク要求の発生中に前記不許可条件が成立しないと判定されると、前記第1自律ロボットに前記タスクの実施を許可することと、
前記タスク要求の発生中に前記不許可条件が成立すると判定されると、前記第1自律ロボットに前記タスクの実施を待機させることと、
を行うように構成されている、自律ロボットシステム。
続きを表示(約 1,600 文字)
【請求項2】
前記処理回路は、地図データを取得するように構成されており、
前記タスクは、前記第1自律ロボットの目的地である第1目的地への移動を含み、
前記タスク要求は、前記第1目的地への移動を要求する移動要求を含む、請求項1に記載の自律ロボットシステム。
【請求項3】
前記処理回路は、前記第1自律ロボットの位置データを取得するように構成され、
前記不許可条件は、
前記第1自律ロボットの前記位置データが示す位置と前記第2自律ロボットの前記位置データが示す位置とが所定の特定位置関係にあるとの条件と、
前記第2自律ロボットの前記ステータスデータが示すステータスが所定の特定状態であるとの条件と、を含む、請求項2に記載の自律ロボットシステム。
【請求項4】
前記地図データは、前記複数の自律ロボットが移動可能なエリアを複数の領域に区分けする領域データを含み、
前記特定位置関係は、前記第1自律ロボットが存在する領域と同じ領域に前記第2自律ロボットが存在するとの関係を含む、請求項3に記載の自律ロボットシステム。
【請求項5】
前記第2自律ロボットの前記特定状態は、移動状態を含む、請求項4に記載の自律ロボットシステム。
【請求項6】
前記処理回路は、前記第1自律ロボットの位置データを取得するように構成され、
前記不許可条件は、
前記第1自律ロボットが存在する領域と同じ領域に前記第2自律ロボットが存在するとの条件と、
前記地図データ上における前記第1目的地に前記第2自律ロボットが存在しているとの条件と、を含む、請求項2に記載の自律ロボットシステム。
【請求項7】
前記第2自律ロボットの前記特定状態は、待機状態を含み、
前記処理回路は、前記第2自律ロボットの目的地である第2目的地を取得するように構成され、
前記不許可条件は、
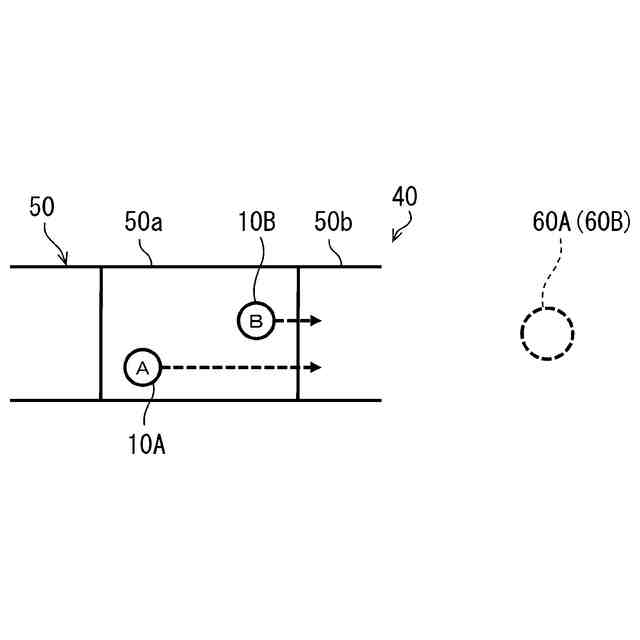
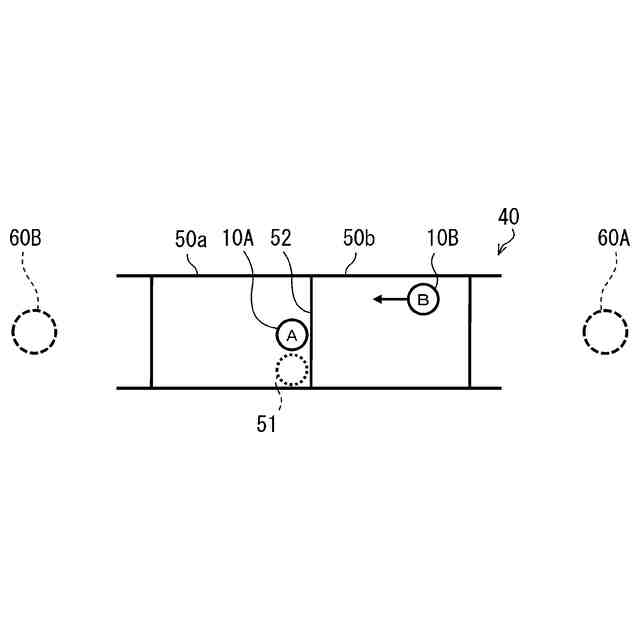
前記第1自律ロボットの前記第1目的地への進行方向において前記第1自律ロボットが存在する第1領域の次にある第2領域が、前記第2自律ロボットの前記第2目的地への進行方向において前記第2自律ロボットが存在する前記第1領域の次にある第2領域と同じであるとの条件を更に含む、請求項4に記載の自律ロボットシステム。
【請求項8】
前記地図データは、前記複数の自律ロボットが移動可能なエリアを複数の領域に区分けする領域データを含み、
前記特定位置関係は、前記第1自律ロボットの前記第1目的地への進行方向において前記第1自律ロボットが存在する第1領域の次の第2領域に前記第2自律ロボットが存在するとの関係を含み、
前記不許可条件は、前記第1自律ロボットが前記第1領域と前記第2領域との間の境界から所定距離以内にいるとの条件を更に含む、請求項3に記載の自律ロボットシステム。
【請求項9】
前記第2自律ロボットの前記特定状態は、移動状態を含む、請求項8に記載の自律ロボットシステム。
【請求項10】
前記処理回路は、前記第2自律ロボットの目的地である第2目的地、及び、前記第1自律ロボットの位置データを取得するように構成され、
前記地図データは、前記複数の自律ロボットが移動可能なエリアを複数の領域に区分けする領域データを含み、
前記不許可条件は、
前記第1自律ロボットが前記第1領域と前記第2領域との間の境界から所定距離以内にいるとの条件と、
前記第1自律ロボットの前記第1目的地への進行方向において前記第1自律ロボットが存在する第1領域の次の第2領域に前記第2自律ロボットが存在するとの条件と、
前記地図データ上における前記第1目的地に前記第2自律ロボットが存在しているとの条件と、を含む、請求項2に記載の自律ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、施設内を移動する複数の移動体が通路の途中で閉塞を引き起こすことを抑制する管制システムが開示されている。この管制システムは、移動体の現在の位置を含む領域から幅のより狭い領域に進入する前に、各中間領域に関する各々の情報を用いて進入可否を判定する。当該管制システムは、地図情報に基づいて進入可否を判定するため、曲がり角などによって中間領域の入口から観測できない領域を移動体が通る場合においても、各中間領域についての進入可否を判定できる。
【先行技術文献】
【特許文献】
【0003】
特開2022-137944号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、通路の幅が二台の移動体の通過を許容する場合でも、複数の移動体が自律制御によってそれぞれ移動すると、二台の移動体が互いに近づいたときに互いを避け合おうとする。自律制御が単純である場合には、二台の移動体が相互干渉して円滑に通路を通過できない可能性がある。また、移動体の自律制御のプログラムは複雑にしないことが望まれる。
【0005】
そこで本開示の一態様は、複数の自律ロボットがそれぞれタスクを実施するシステムにおいて、自律ロボット同士の相互干渉を簡易に防ぐことを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る自律ロボットシステムは、第1自律ロボット及び第2自律ロボットを含む複数の自律ロボットがそれぞれタスクを実施する自律ロボットシステムであって、前記第1自律ロボットに対するタスク要求に基づき、前記第1自律ロボットを制御するように構成された処理回路を備える。前記処理回路は、前記第2自律ロボットの位置を示す位置データと、前記第2自律ロボットのステータスを示すステータスデータと、を含む他ロボット情報を取得することと、前記タスク要求の発生中に前記他ロボット情報について所定の不許可条件が成立するか否かを判定することと、前記タスク要求の発生中に前記不許可条件が成立しないと判定されると、前記第1自律ロボットに前記タスクの実施を許可することと、前記タスク要求の発生中に前記不許可条件が成立すると判定されると、前記第1自律ロボットに前記タスクの実施を待機させることと、を行うように構成されている。
【0007】
本開示の一態様に係る自律ロボットの制御方法は、第1自律ロボット及び第2自律ロボットを含む複数の自律ロボットがそれぞれタスクを実施する自律ロボットシステムに用いられる自律ロボットの制御方法であって、前記第2自律ロボットの位置を示す位置データと、前記第2自律ロボットのステータスを示すステータスデータと、を含む他ロボット情報を取得することと、前記第1自律ロボットに対するタスク要求の発生中に、前記他ロボット情報について所定の不許可条件が成立するか否かを判定することと、前記タスク要求の発生中に前記不許可条件が成立しないと判定されると、前記第1自律ロボットに前記タスクの実施を許可することと、前記タスク要求の発生中に前記不許可条件が成立すると判定されると、前記第1自律ロボットに前記タスクの実施を待機させることと、を含む。
【0008】
本開示の一態様に係る自律ロボットの制御プログラムは、前記方法を少なくとも1つのプロセッサに実行させる。前記プログラムは、コンピュータ読み取り可能な記憶媒体に記憶され得る。前記記憶媒体は、非一時的(non-transitory)で有形(tangible)な媒体である。前記記憶媒体は、コンピュータ(例えば、携帯情報端末、パーソナルコンピュータ、サーバ等)に内蔵又は外付けされ得る。前記記憶媒体は、RAM、ROM、EEPROM、ストレージ等を含み、例えば、ハードディスク、フラッシュメモリ、光ディスク等とし得る。前記記憶媒体に記憶されたプログラムは、前記記憶媒体が直接接続されるコンピュータにおいて実行されてもよいし、前記記憶媒体とネットワーク(例えば、インターネット)を介して接続されたコンピュータにおいて実行されてもよい。
【発明の効果】
【0009】
本開示の一態様によれば、第1自律ロボットへのタスク要求の発生中でも、第2自律ロボットの位置又はステータスに応じて第1自律ロボットのタスクの実施を待機するため、第2自律ロボットとの相互干渉を簡易に防ぐことができる。
【図面の簡単な説明】
【0010】
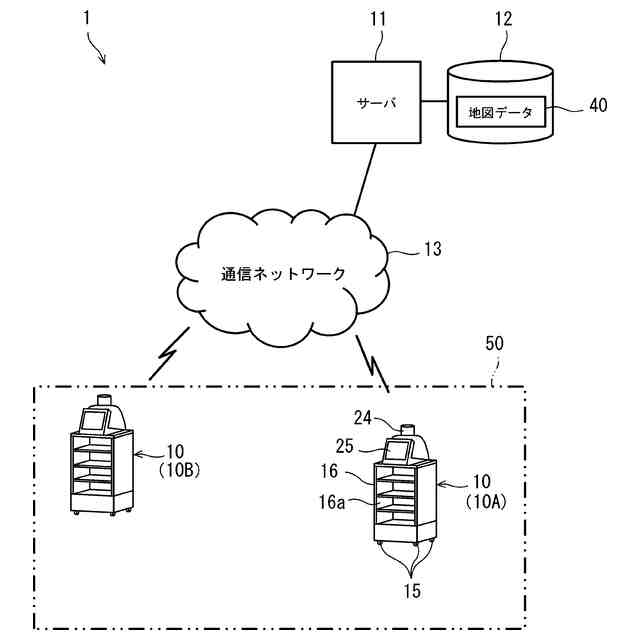
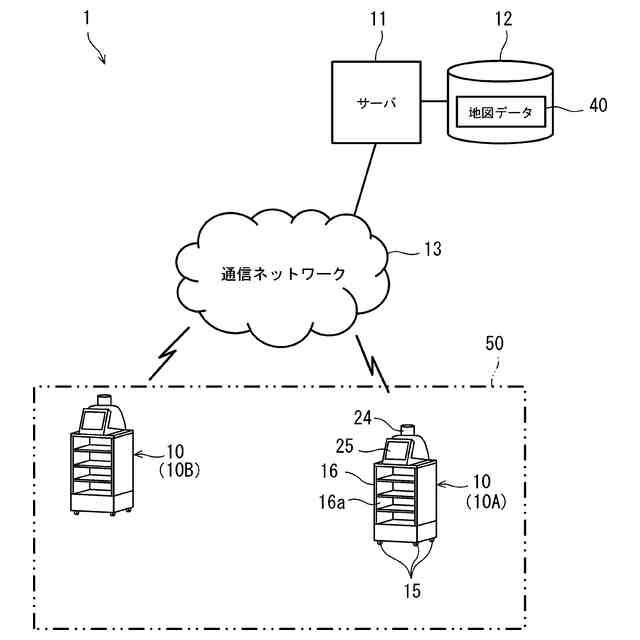
図1は、実施形態に係る自律ロボットシステムの概略図である。
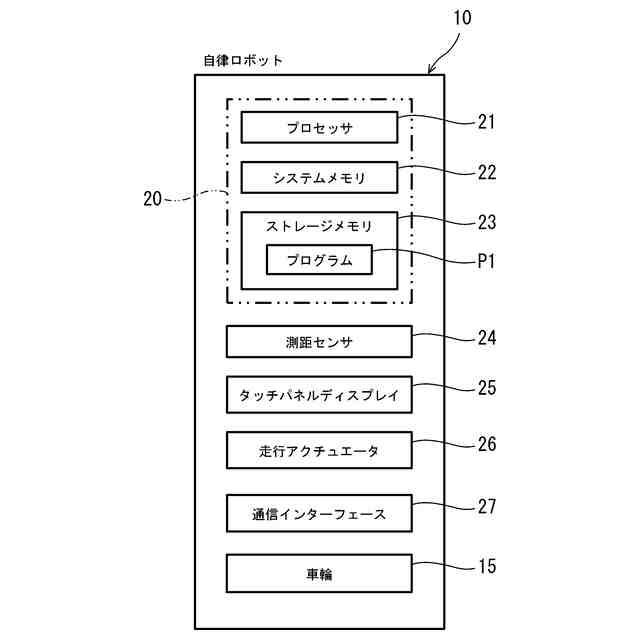
図2は、図1の自律ロボットのブロック図である。
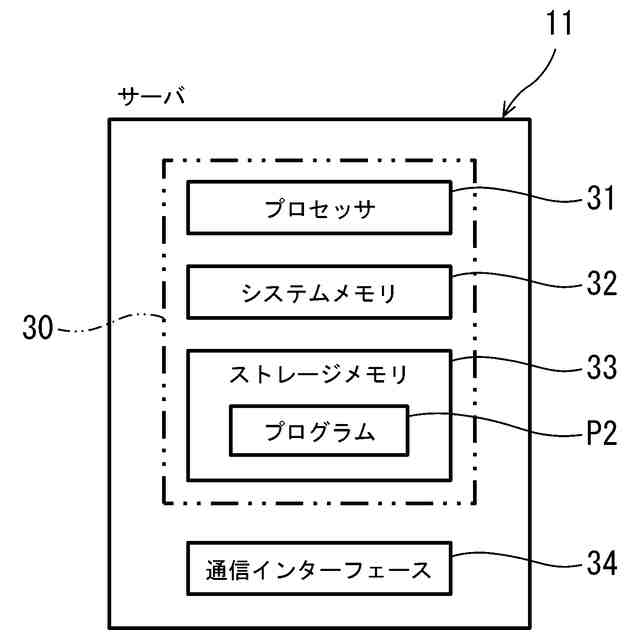
図3は、図2のサーバのブロック図である。
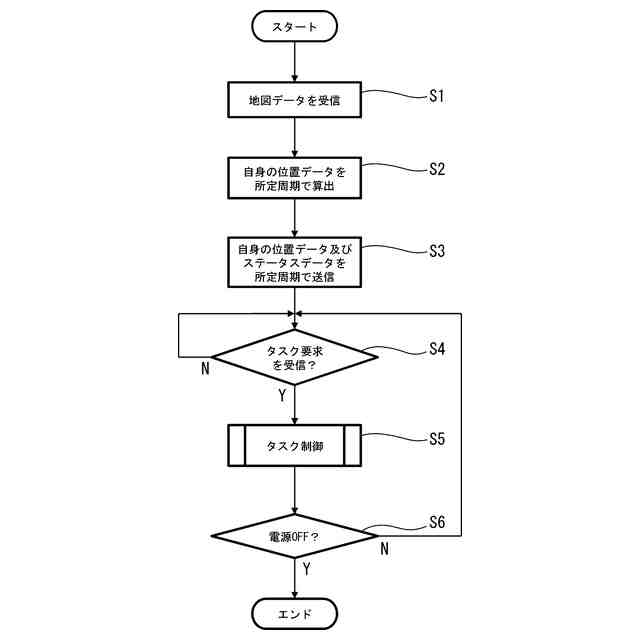
図4は、図2の自律ロボットの制御を説明するフローチャートである。
図5は、図4のタスク制御を説明するフローチャートである。
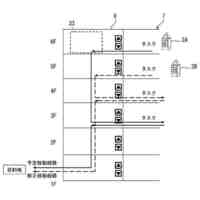
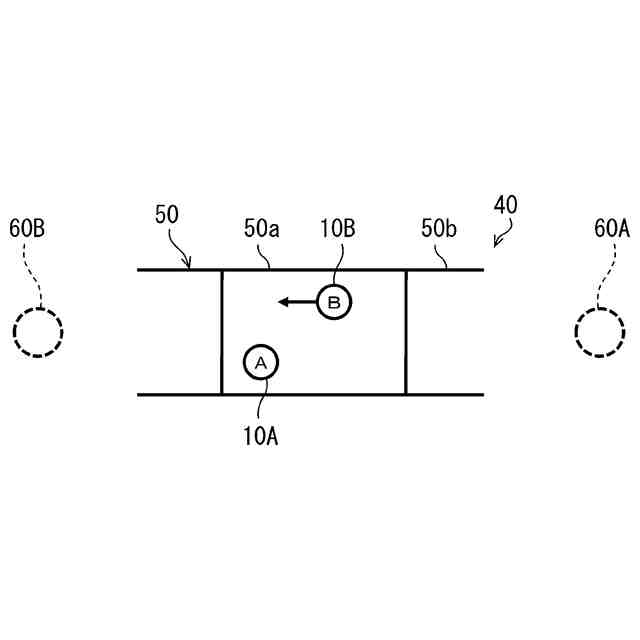
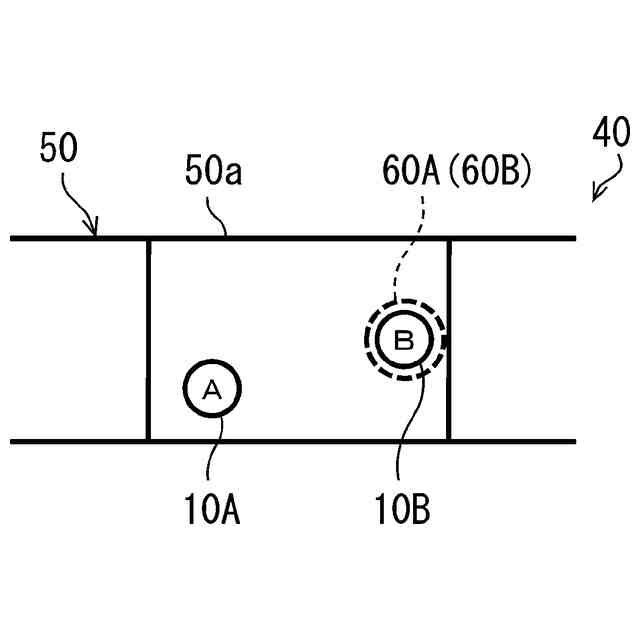
図6は、図5の移動不可条件の第1例を説明する平面図である。
図7は、図5の移動不可条件の第2例を説明する平面図である。
図8は、図5の移動不可条件の第3例を説明する平面図である。
図9は、図5の移動不可条件の第4例を説明する平面図である。
図10は、図9の第1自律ロボットの待機位置への移動を説明する平面図である。
図11は、図5の移動不可条件の第5例を説明する平面図である。
図12は、図5の移動不可条件の第6例を説明する平面図である。
図13は、2台の自律ロボットが境界を挟んで向かい合わせたときの優先度の例を説明する平面図である。
図14は、図13の状況の後の状況の平面図である。
図15は、図14の状況の後の状況の平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
29日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
20日前
個人
作業車両自動化システム
1日前
愛知製鋼株式会社
目標軌跡の設定方法
9日前
ローム株式会社
半導体集積回路
1か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
6日前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
減圧弁
3日前
キヤノン電子株式会社
加工装置、及び、制御方法
29日前
株式会社鷺宮製作所
制御装置
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
マーク ヘイリー
消防ロボット
13日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社テイエルブイ
減圧弁の制御装置
15日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
アズビル株式会社
制御システムおよび制御方法
9日前
アズビル株式会社
制御システムおよび制御方法
9日前
三菱電機株式会社
電源回路
29日前
オムロン株式会社
安全装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
ローム株式会社
半導体装置
2か月前
株式会社ダイフク
飛行体制御システム
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
24日前
ミツミ電機株式会社
電源回路および駆動回路
9日前
国立大学法人東海国立大学機構
ミリング加工監視方法
22日前
株式会社日立製作所
製造工程管理システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ