TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110812
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004870
出願日
2024-01-16
発明の名称
経路計画装置、運転支援システム、経路計画方法及び経路計画プログラム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
G05D
1/622 20240101AFI20250722BHJP(制御;調整)
要約
【課題】リスクを低減できる経路を計画する。
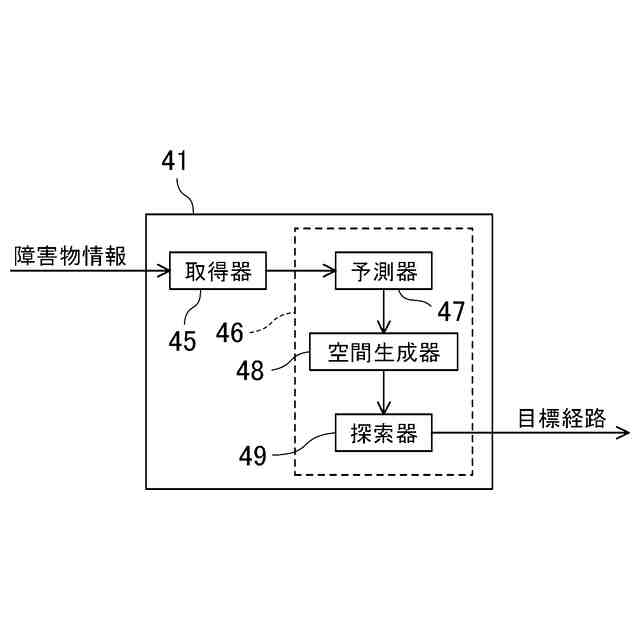
【解決手段】経路計画装置100は、障害物の位置に関する情報を含む障害物情報を取得する取得器45と、始点Sから目標点Gまでの移動体1の目標経路を移動体1と障害物との干渉を回避するように障害物情報に基づいて生成する生成器46とを備えている。生成器46は、目標経路の複数の候補を探索し、複数の候補の中から経路コストに基づいて目標経路を決定する。経路コストは、複数の候補のそれぞれの蛇行の程度に関連する蛇行コストを含む。
【選択図】図6
特許請求の範囲
【請求項1】
障害物の位置に関する情報を含む障害物情報を取得する取得器と、
始点から目標点までの移動体の目標経路を前記移動体と前記障害物との干渉を回避するように前記障害物情報に基づいて生成する生成器とを備え、
前記生成器は、前記目標経路の複数の候補を探索し、前記複数の候補の中から経路コストに基づいて前記目標経路を決定し、
前記経路コストは、前記複数の候補のそれぞれの蛇行の程度に関連する蛇行コストを含む経路計画装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の経路計画装置において、
前記生成器は、前記障害物の位置の経時変化を予測して、前記移動体と前記障害物との干渉を回避する前記複数の候補を探索する経路計画装置。
【請求項3】
請求項2に記載の経路計画装置において、
前記生成器は、
前記移動体の移動する二次元空間に時間を次元として加えた三次元空間において前記障害物の将来的な予測位置を含む三次元状の障害物領域を作成し、
前記複数の候補を前記三次元空間内において前記障害物領域を避けて探索する経路計画装置。
【請求項4】
請求項1に記載の経路計画装置において、
前記蛇行コストは、前記複数の候補のそれぞれにおける曲率に関連する曲率コストを含む経路計画装置。
【請求項5】
請求項1に記載の経路計画装置において、
前記生成器は、前記移動体の非ホロノミック特性に基づいて前記複数の候補を探索する経路計画装置。
【請求項6】
請求項1に記載の経路計画装置において、
前記生成器は、前記複数の候補の探索及び前記目標経路の決定を逐次更新する経路計画装置。
【請求項7】
請求項1乃至6の何れか1つに記載の経路計画装置と、
自動運転を行う移動体に搭載され、前記経路計画装置からの前記目標経路を表示する表示器とを備える運転支援システム。
【請求項8】
請求項7に記載の運転支援システムにおいて、
前記経路計画装置は、前記複数の候補の中から複数の前記目標経路を決定し、
前記表示器は、複数の前記目標経路を表示する運転支援システム。
【請求項9】
請求項8に記載の運転支援システムにおいて、
前記表示器に表示された複数の前記目標経路の中から前記移動体の自動運転に用いられる一の前記目標経路の選択をユーザから受け付ける受付器をさらに備える運転支援システム。
【請求項10】
請求項9に記載の運転支援システムにおいて、
前記経路計画装置は、前記複数の前記目標経路に前記経路コストに応じた優先順位を付与し、
前記表示器は、前記複数の目標経路の前記優先順位をさらに表示する運転支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、経路計画装置、運転支援システム、経路計画方法及び経路計画プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来より、移動体の経路を計画する装置が知られている。例えば、特許文献1に開示された経路計画では、他の移動体の移動を考慮して、他の移動体との干渉を回避する経路が計画される。
【先行技術文献】
【特許文献】
【0003】
特開2020-4095号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に係る経路計画では、他の移動体との干渉を回避する経路を計画することによって安全性を確保している。しかしながら、リスク回避の観点からはさらなる改善の余地がある。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、リスクを低減できる経路を計画することにある。
【課題を解決するための手段】
【0006】
ここに開示された経路計画装置は、障害物の位置に関する情報を含む障害物情報を取得する取得器と、始点から目標点までの移動体の目標経路を前記移動体と前記障害物との干渉を回避するように前記障害物情報に基づいて生成する生成器とを備え、前記生成器は、前記目標経路の複数の候補を探索し、前記複数の候補の中から経路コストに基づいて前記目標経路を決定し、前記経路コストは、前記複数の候補のそれぞれの蛇行の程度に関連する蛇行コストを含む。
【0007】
ここに開示された運転支援システムは、前記経路計画装置と、自動運転を行う移動体に搭載され、前記経路計画装置からの前記目標経路を表示する表示器とを備える。
【0008】
ここに開示された経路計画方法は、障害物の位置に関する情報を含む障害物情報を取得することと、始点から目標点までの移動体の目標経路を前記移動体と前記障害物との干渉を回避するように前記障害物情報に基づいて生成することとを含み、前記目標経路を生成することは、前記目標経路の複数の候補を探索し、前記複数の候補の中から経路コストに基づいて前記目標経路を決定し、前記経路コストは、前記複数の候補のそれぞれの蛇行の程度に関連する蛇行コストを含む。
【0009】
ここに開示された経路計画プログラムは、障害物の位置に関する情報を含む障害物情報を取得する機能と、始点から目標点までの移動体の目標経路を前記移動体と前記障害物との干渉を回避するように前記障害物情報に基づいて生成する機能とをコンピュータに実現させ、前記目標経路を生成する機能は、前記目標経路の複数の候補を探索し、前記複数の候補の中から経路コストに基づいて前記目標経路を決定し、前記経路コストは、前記複数の候補のそれぞれの蛇行の程度に関連する蛇行コストを含む。
【発明の効果】
【0010】
前記経路計画装置によれば、リスクを低減できる経路を計画することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
6日前
川崎重工業株式会社
水素遮蔽膜
26日前
川崎重工業株式会社
排ガス採取器
10日前
川崎重工業株式会社
液化ガス導入システム
6日前
川崎重工業株式会社
電池セル及びその分解方法
20日前
川崎重工業株式会社
電力供給システムおよびその制御方法
5日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
5日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
2日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
16日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
16日前
川崎重工業株式会社
多重殻タンク
16日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
11日前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
10日前
中国電力株式会社
ポート検出器、ポート異常検出システム、ポート検出器の製造方法及びポート異常検出方法
18日前
個人
生産早送り装置
26日前
株式会社豊田自動織機
産業車両
16日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
2日前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
10日前
個人
作業車両自動化システム
1か月前
ローム株式会社
半導体集積回路
3か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ペダル機構
3か月前
トヨタ自動車株式会社
移動制御システム
26日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
6日前
三栄ハイテックス株式会社
基準電圧回路
3か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社鷺宮製作所
制御装置
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
三菱電機株式会社
自己位置推定装置
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ