TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126996
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024023437
出願日
2024-02-20
発明の名称
表面材
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
G10K
11/16 20060101AFI20250825BHJP(楽器;音響)
要約
【課題】
発生源に返る音波の量を低減可能な水中構造物の表面材を提供する。
【解決手段】
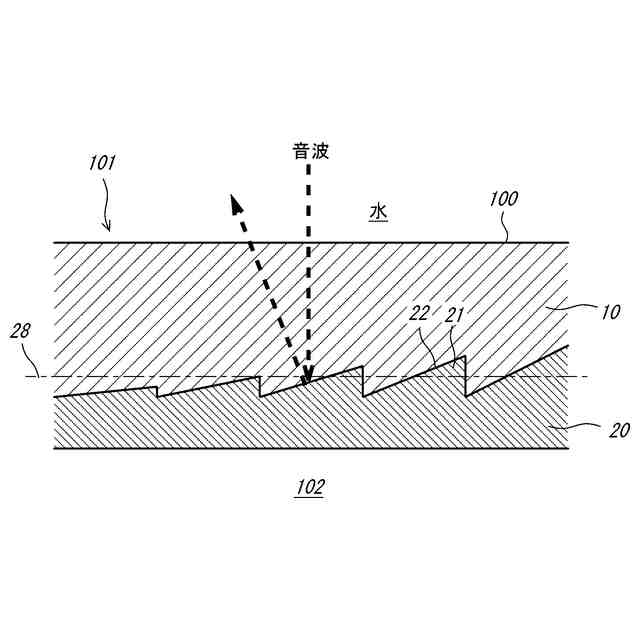
本開示の一態様に係る表面材は、水中構造物の表面部を形成する表面材であって、当該表面材の最も外側の部分に位置し音波を吸収する吸音層と、当該表面材の前記吸音層よりも内側の部分に位置し、前記吸音層を透過した音波を入射角とは異なる反射角で反射する反射層と、を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
水中構造物の表面部を形成する表面材であって、
当該表面材の最も外側の部分に位置し音波を吸収する吸音層と、
当該表面材の前記吸音層よりも内側の部分に位置し、前記吸音層を透過した音波を入射角とは異なる反射角で反射する反射層と、を備えている、表面材。
続きを表示(約 460 文字)
【請求項2】
前記吸音層は表面が平滑である、請求項1に記載の表面材。
【請求項3】
前記反射層は表面に複数の反射表面凸部を含み、
前記複数の反射表面凸部は、前記反射層の巨視的な表面に対して傾斜する傾斜面をそれぞれ有する、請求項1に記載の表面材。
【請求項4】
前記反射層は裏面に複数の反射裏面凸部を含み、
前記複数の反射裏面凸部は、前記反射層の巨視的な裏面に対して傾斜する傾斜面をそれぞれ有する、請求項1に記載の表面材。
【請求項5】
前記吸音層は、
第1吸音層と、
前記吸音層の前記第1吸音層よりも内側の部分に位置し、前記第1吸音層と音響インピーダンスが異なる第2吸音層と、を含んでいる、請求項1に記載の表面材。
【請求項6】
前記第2吸音層は表面に複数の吸音表面凸部を含み、
前記複数の吸音表面凸部は、前記第2吸音層の巨視的な表面に対して傾斜する傾斜面をそれぞれ有する、請求項5に記載の表面材。
発明の詳細な説明
【技術分野】
【0001】
本開示は、水中構造物の表面材に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
下記の特許文献1には、多数の気孔を有するゴムシートを積層して成る水中吸音材が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2005-227702号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
水中構造物は、表面に吸音材を設けることで、例えば工事現場から発せられた音波を吸収することができる。ただし、水中構造物に到達した音波を全て吸音材で吸収することは実質的に不可能である。そのため、水中構造物で反射した音波は、騒音となって音波の発生源に返るおそれがある。
【0005】
そこで、本開示は、発生源に返る音波の量を低減可能な水中構造物の表面材を提供することを目的としている。
【課題を解決するための手段】
【0006】
本開示の一態様に係る表面材は、水中構造物の表面部を形成する表面材であって、当該表面材の最も外側の部分に位置し音波を吸収する吸音層と、当該表面材の前記吸音層よりも内側の部分に位置し、前記吸音層を透過した音波を入射角とは異なる反射角で反射する反射層と、を備えている。
【発明の効果】
【0007】
この構成によれば、発生源に返る音波の量を低減可能な水中構造物の表面材を提供することができる。
【図面の簡単な説明】
【0008】
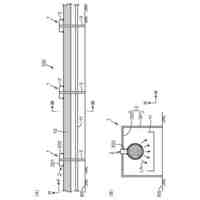
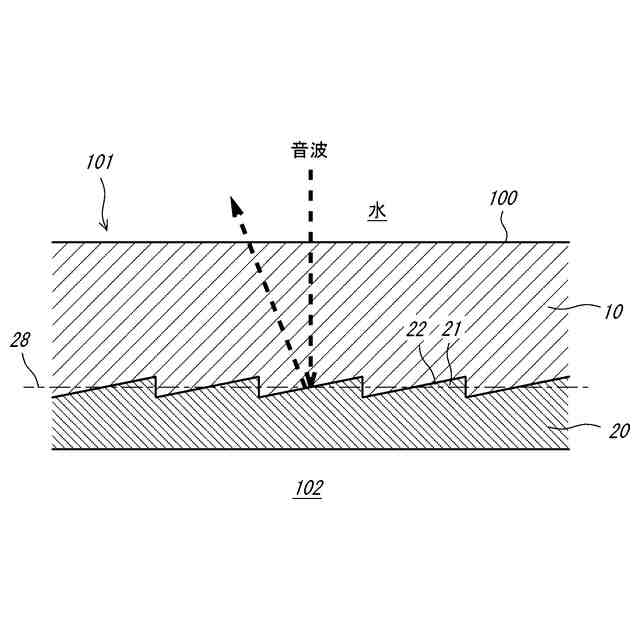
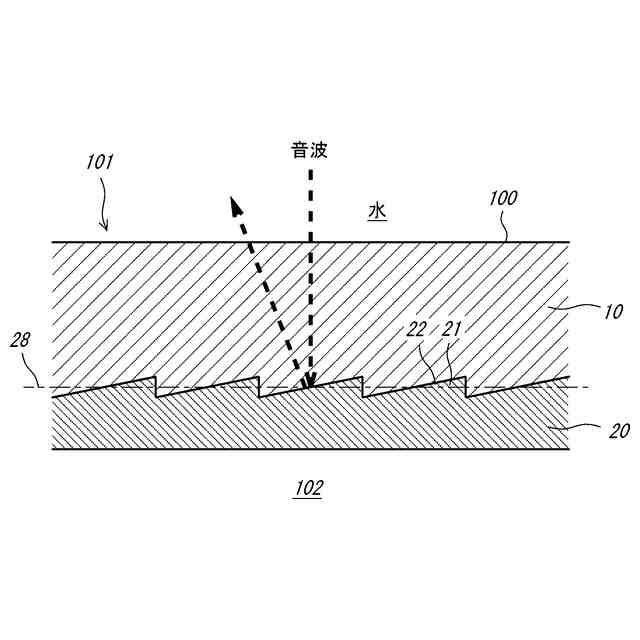
図1は、第1実施形態に係る表面材の断面図である。
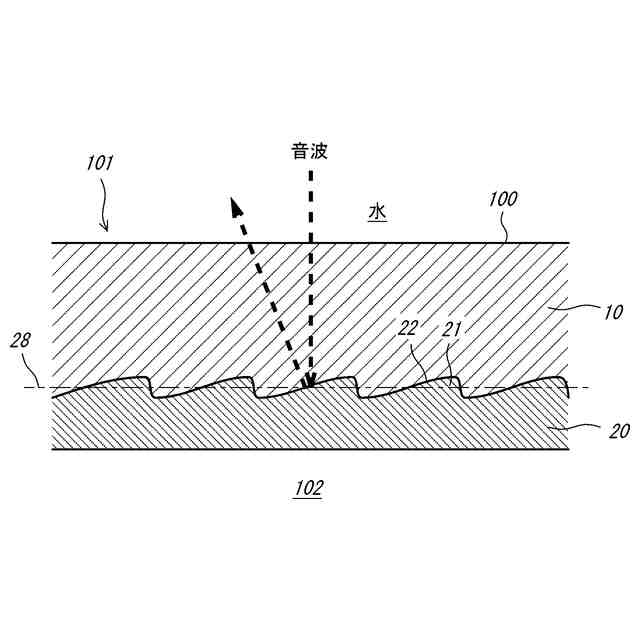
図2は、第1実施形態の第1の変形例に係る表面材の断面図である。
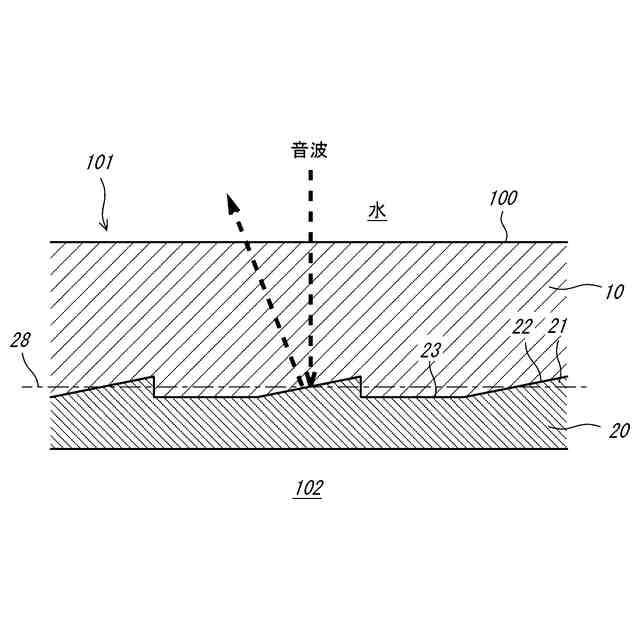
図3は、第1実施形態の第2の変形例に係る表面材の断面図である。
図4は、第1実施形態の第3の変形例に係る表面材の断面図である。
図5は、第2実施形態に係る表面材の断面図である。
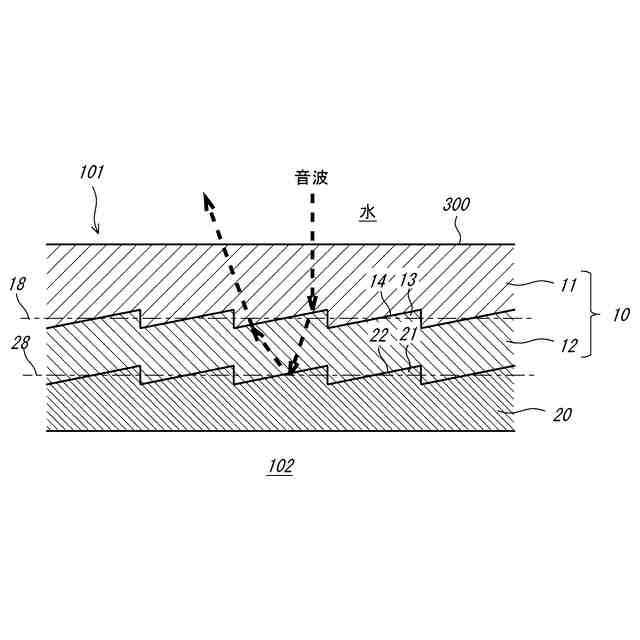
図6は、第3実施形態に係る表面材の断面図である。
【発明を実施するための形態】
【0009】
(第1実施形態)
以下、実施形態について説明する。はじめに、第1実施形態に係る表面材100について説明する。図1は、第1実施形態に係る表面材100の断面図である。図1の紙面上下方向が表面材100の厚み方向である。表面材100は、水中に位置する水中構造物101の表面部を形成する。水中構造物101には、例えば、水中に位置する建造物、および、水上または水中を航行する船舶等が含まれる。また、本実施形態の「水」には、「海水」及び「淡水」が含まれる。
【0010】
本実施形態では、表面材100は、水中構造物101の本体102の表面に貼り付けられている。ただし、表面材100は、水中構造物101の本体102と一体に形成されていていてもよい。また、表面材100は複数枚のパネルで形成してもよく、1枚のパネルで形成してもよい。以下では、表面材100からみて水側を「外側」と称し、本体102側を「内側」と称する。図1では、紙面上側が外側であり、紙面下側が内側である。また、外側の面を「表面」と称し、内側の面を「裏面」と称する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1日前
川崎重工業株式会社
ロボット
8日前
川崎重工業株式会社
ロボット
10日前
川崎重工業株式会社
断熱配管
1日前
川崎重工業株式会社
ダクト継手
8日前
川崎重工業株式会社
塗装システム
1日前
川崎重工業株式会社
監視システム
2日前
川崎重工業株式会社
ゼオライト触媒
10日前
川崎重工業株式会社
遠心ターボ機械
10日前
川崎重工業株式会社
配管の支持構造
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ワーク搬送ロボット
1日前
川崎重工業株式会社
締結方法及び締結装置
8日前
川崎重工業株式会社
極低温流体用配管設備
3日前
川崎重工業株式会社
ロボットの診断システム
2日前
川崎重工業株式会社
環状フレームの成形方法
12日前
株式会社キッツ
逆流防止弁
2日前
川崎重工業株式会社
支援システムおよび支援方法
1日前
川崎重工業株式会社
経路作成方法及び経路作成装置
1日前
川崎重工業株式会社
アンモニア回収システム及び方法
1日前
川崎重工業株式会社
ガス燃料供給システムおよび船舶
8日前
川崎重工業株式会社
ロボットシステム及びその動作方法
3日前
川崎重工業株式会社
配管の接続構造および配管システム
4日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1日前
川崎重工業株式会社
油圧ショベルの油圧システムおよびブーム制御弁
4日前
川崎重工業株式会社
ロボットシステムの制御方法及びロボットシステム
2日前
川崎重工業株式会社
秘密計算システム、秘密計算方法及び秘密計算装置
9日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1日前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ