TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025148671
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024048917
出願日
2024-03-26
発明の名称
ツール動作機構
出願人
東レエンジニアリング株式会社
代理人
個人
,
個人
主分類
B25J
11/00 20060101AFI20251001BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】壁部を介して壁内空間に設けられたツールを壁外空間から動かす機構における前記ツールの動作性能を向上させることができるツール動作機構を提供すること。
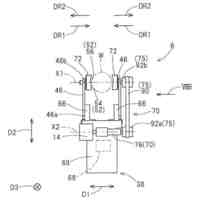
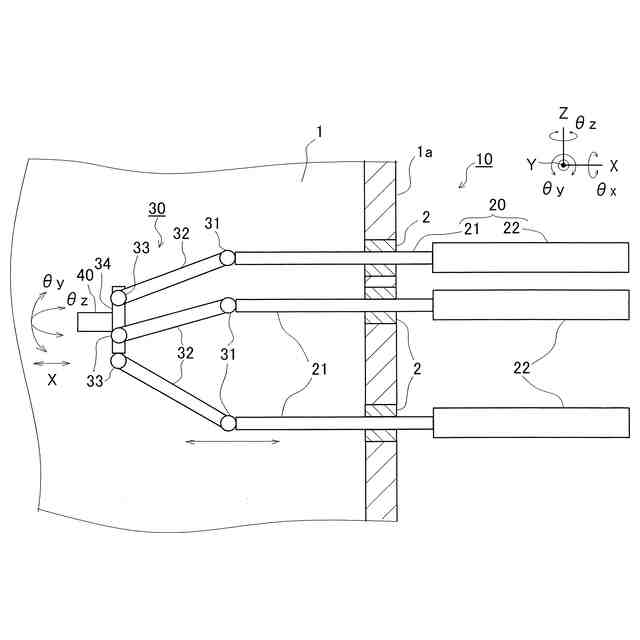
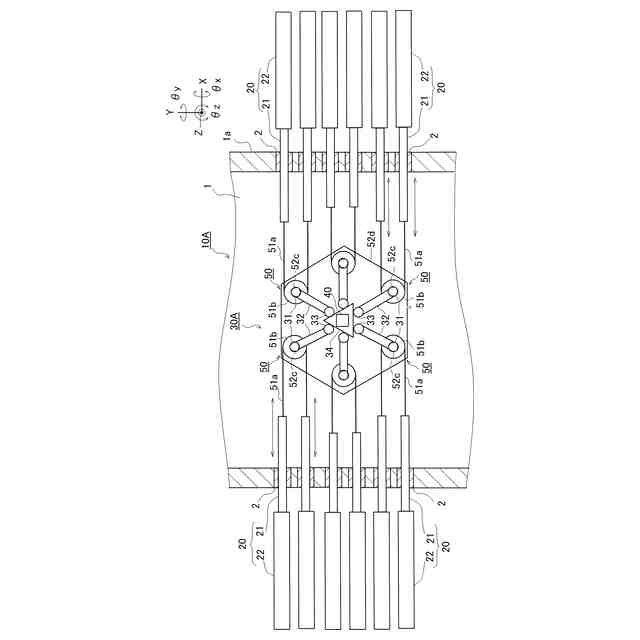
【解決手段】壁外空間と壁内空間とを隔てる壁部に貫通させた状態で配設されるツール動作機構10であって、壁部の内外方向に直線運動する直動部21を有し、直動部21を壁部に気密状態で貫通して配設される複数の直動アクチュエータ20と、これら複数の直動アクチュエータ20の直動部21に連結されるリンク機構32と、リンク機構32に取り付けられるツール40とを備え、複数の直動アクチュエータ20が壁外空間に配設され、リンク機構32とツール40とが壁内空間に配設され、複数の直動アクチュエータ20の直動部21を直線運動させることによりリンク機構30の動作を制御してツール40の壁内空間内での位置と向きを変化させるように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
壁外空間と壁内空間とを隔てる壁部に貫通させた状態で配設されるツール動作機構であって、
前記壁部の内外方向に直線運動する直動部を有し、該直動部が前記壁部を気密状態で貫通して配設される複数の直動アクチュエータと、
これら複数の直動アクチュエータの前記直動部に連結されるリンク機構と、
該リンク機構に取り付けられるツールとを備え、
前記複数の直動アクチュエータが前記壁外空間に配設され、
前記リンク機構と前記ツールとが前記壁内空間に配設され、
前記複数の直動アクチュエータの前記直動部を直線運動させることにより前記リンク機構の動作を制御して前記ツールの前記壁内空間内での位置と向きを変化させるように構成されていることを特徴とするツール動作機構。
続きを表示(約 1,100 文字)
【請求項2】
前記リンク機構が、
前記複数の直動アクチュエータの前記直動部に取り付けられる複数の第1ジョイント部と、
これら複数の第1ジョイント部のそれぞれに一端側が取り付けられる複数のリンク部と、
これら複数のリンク部の各々の他端側に取り付けられる複数の第2ジョイント部と、
これら複数の第2ジョイント部が取り付けられる可動部と、を含んで構成され、
該可動部に前記ツールが取り付けられていることを特徴とする請求項1記載のツール動作機構。
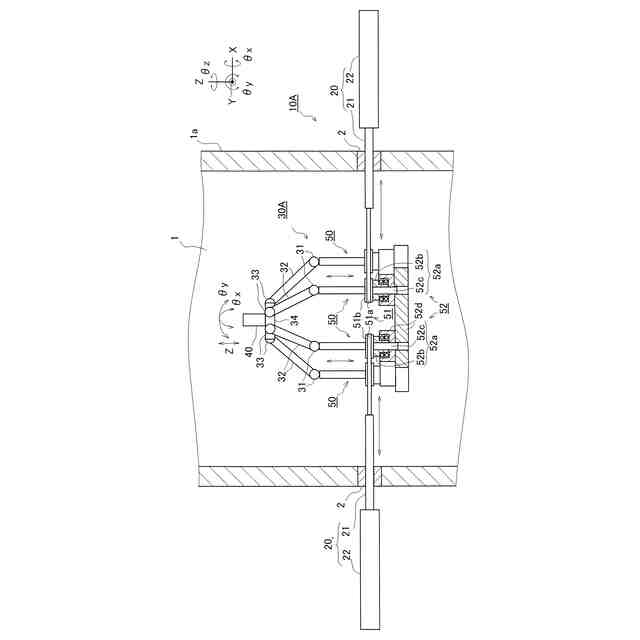
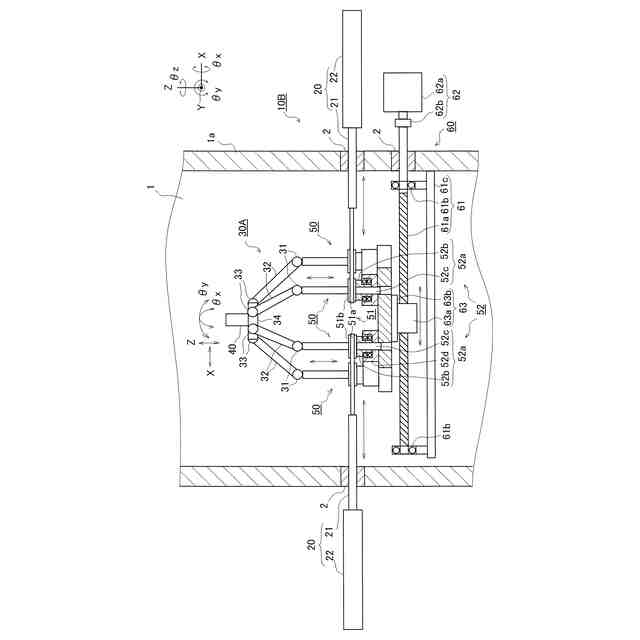
【請求項3】
前記リンク機構が、
前記複数の直動アクチュエータの前記直動部に取り付けられる複数の運動方向変換部と、
これら複数の運動方向変換部のそれぞれに取り付けられる複数の第1ジョイント部と、
これら複数の第1ジョイント部のそれぞれに一端側が取り付けられる複数のリンク部と、
これら複数のリンク部の各他端側に取り付けられる複数の第2ジョイント部と、
これら複数の第2ジョイント部が取り付けられる可動部と、を含んで構成され、
該可動部に前記ツールが取り付けられていることを特徴とする請求項1記載のツール動作機構。
【請求項4】
前記運動方向変換部が、
前記直動部の直線運動を回転運動に変換する回転運動変換部と、
該回転運動変換部の回転運動を直線運動に変換する直線運動変換部とを備え、
該直線運動変換部の先端側に前記第1ジョイント部が取り付けられ、
前記直線運動変換部により変換される直線運動の方向が、前記直動部の直線運動の方向とは異なる方向であることを特徴とする請求項3記載のツール動作機構。
【請求項5】
前記リンク機構を前記直動部の直線運動の方向に移動可能とする移動機構を備え、
該移動機構が、前記壁部を貫通した状態で配設されていることを特徴とする請求項3記載のツール動作機構。
【請求項6】
前記移動機構が、
前記直動部の直線運動の方向と平行に、前記壁部を気密状態で貫通して配設される動力伝達部と、
前記壁外空間に配設されて、前記動力伝達部を駆動させる駆動部と、
前記壁内空間に配設されて、前記直動部の直線運動の方向に移動可能な状態で前記動力伝達部に取り付けられる移動部とを備え、
該移動部に前記リンク機構が配設されていることを特徴とする請求項5記載のツール動作機構。
【請求項7】
前記壁外空間が大気雰囲気であり、
前記壁内空間が所定の減圧雰囲気、所定のガス雰囲気、又は所定の液体雰囲気であることを特徴とする請求項1~6のいずれかの項に記載のツール動作機構。
発明の詳細な説明
【技術分野】
【0001】
本発明はツール動作機構に関し、より詳細には、壁部を介して壁内空間に設けられたツールを壁外空間から動かすことができるツール動作機構に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
半導体、液晶パネル、有機ELなどの製造工程には、気密性を有するチャンバ内で処理を行う工程が多く含まれている。
例えば、下記の特許文献1には、半導体ウエハや液晶パネルなどの基板にレジストなどの薬液を塗布する薬液塗布装置が記載されている。
特許文献1記載の薬液塗布装置は、プロセスチャンバ内部に、ミストディスペンサノズルと、ワークが固定されるテーブルとを備え、前記ミストディスペンサノズルに対向する位置に前記テーブルが設けられている。
前記ミストディスペンサノズルには、これをラジアル方向に移動させるための制御棒が固定され、該制御棒は前記プロセスチャンバの内壁を貫通して外部の移動テーブルに連結され、該移動テーブルにより稼働されるようになっている。かかる構成により、前記ミストディスペンサノズルは、前記テーブルに構成された前記ワークの半径方向に稼働されるようになっている。
【0003】
上記レジスト塗布工程の他に、CVD(Chemical Vapor Deposition)処理工程、PVD(Physical Vapor Deposition)処理工程、スパッタリング処理工程、ドライエッチング処理工程、及び露光処理工程などでは、減圧チャンバ内で処理が行われるようになっている。
【0004】
[発明が解決しようとする課題]
気密性を有するチャンバ内で上記のような各種の処理工程を実行するにあたっては、チャンバ内を所定の雰囲気状態に維持したり、発塵の発生やアウトガスの発生を低減したりする必要がある。
そのため、チャンバ内に配設される動作機構は、特許文献1に開示されたような外部の移動テーブルと制御棒による直線動作や平面搬送用のアームロボットによる平面動作などの単純な動作であることが一般的であり、壁内空間であるチャンバ内に配設されるツールを様々な位置や向きに動作させることができないという課題があった。
【先行技術文献】
【特許文献】
【0005】
特開平7-115051号公報
【発明の概要】
【発明の概要】
課題を解決するための手段及びその効果
【0006】
本発明は上記課題に鑑みなされたものであって、壁部を介して壁内空間に設けられたツールを壁外空間から動かす機構における前記ツールの動作性能を向上させることができるツール動作機構を提供することを目的としている。
【0007】
上記目的を達成するために本発明に係るツール動作機構(1)は、壁外空間と壁内空間とを隔てる壁部に貫通させた状態で配設されるツール動作機構であって、
前記壁部の内外方向に直線運動する直動部を有し、該直動部が前記壁部を気密状態で貫通して配設される複数の直動アクチュエータと、
これら複数の直動アクチュエータの前記直動部に連結されるリンク機構と、
該リンク機構に取り付けられるツールとを備え、
前記複数の直動アクチュエータが前記壁外空間に配設され、
前記リンク機構と前記ツールとが前記壁内空間に配設され、
前記複数の直動アクチュエータの前記直動部を直線運動させることにより前記リンク機構の動作を制御して前記ツールの前記壁内空間内での位置と向きを変化させるように構成されていることを特徴としている。
【0008】
上記ツール動作機構(1)によれば、前記複数の直動アクチュエータの前記直動部を直線運動させることにより前記リンク機構の動作を制御して前記ツールの前記壁内空間内での位置と向きを変化させるように構成されているので、前記複数の直動アクチュエータと前記リンク機構とによって前記壁内空間に配設された前記ツールの位置だけでなく向きも変えることが可能となり、前記壁内空間において前記ツールの複雑な動作を実現できる。
【0009】
また本発明に係るツール動作機構(2)は、上記ツール動作機構(1)において、
前記リンク機構が、
前記複数の直動アクチュエータの前記直動部に取り付けられる複数の第1ジョイント部と、
これら複数の第1ジョイント部のそれぞれに一端側が取り付けられる複数のリンク部と、
これら複数のリンク部の各々の他端側に取り付けられる複数の第2ジョイント部と、
これら複数の第2ジョイント部が取り付けられる可動部と、を含んで構成され、
該可動部に前記ツールが取り付けられていることを特徴としている。
【0010】
上記ツール動作機構(2)によれば、前記リンク機構が、前記複数の直動アクチュエータの前記直動部から前記可動部までが前記複数のリンク部で並列に連結されている、いわゆるパラレルリンク機構で構成されることになるので、前記壁内空間において前記可動部に取り付けられた前記ツールの位置や向きを変える動作を精細に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
21日前
川崎重工業株式会社
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
トヨタ自動車株式会社
学習装置
6日前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
エッジ仕上げ装置
2か月前
株式会社安川電機
ロボット
27日前
本田技研工業株式会社
装置
2か月前
川崎重工業株式会社
塗装システム
1か月前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社不二越
垂直多関節ロボット
6日前
株式会社三共コーポレーション
工具保持具
21日前
トヨタ自動車株式会社
ロボットハンド
27日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
アネックスツール株式会社
ドライバービット
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
現場用作業機
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
回転打撃工具
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
セイコーエプソン株式会社
ロボット
1か月前
NTN株式会社
ハンド
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2か月前
山九株式会社
レンチ保持治具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ