TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025166893
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024071067
出願日
2024-04-25
発明の名称
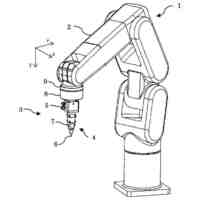
エンドエフェクタ及びロボット装置
出願人
株式会社田村製作所
代理人
個人
主分類
B25J
15/06 20060101AFI20251030BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
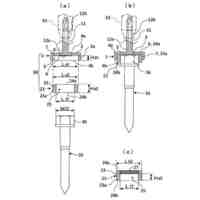
【課題】永久磁石を用いながら、エンドエフェクタの高さ方向の厚みを抑えたエンドエフェクタを提供する。
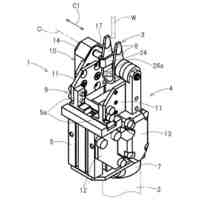
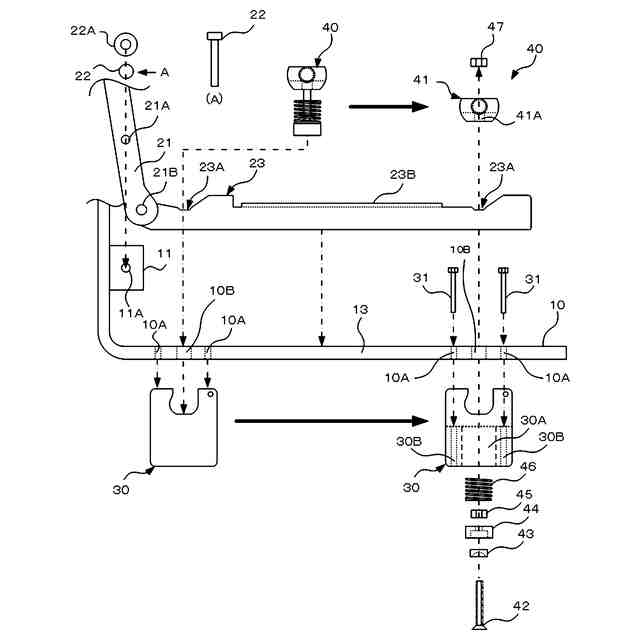
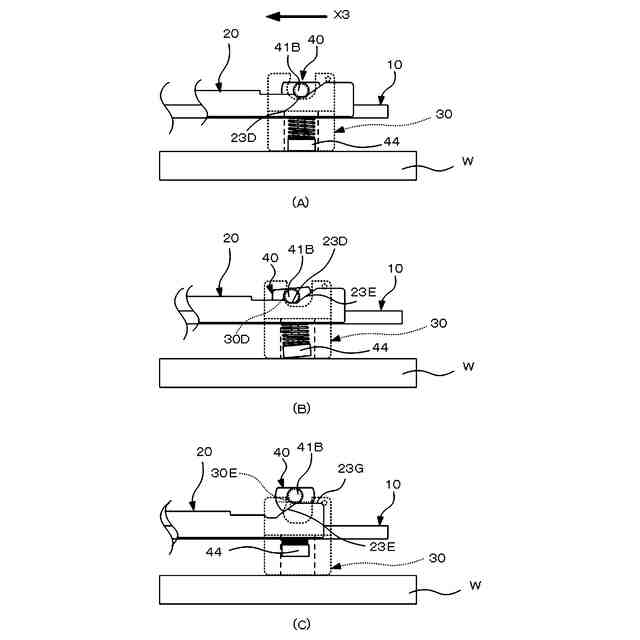
【解決手段】エンドエフェクタ1は、吸着部40の被押圧突起41Bを有する揺動部41に永久磁石43を支柱ボルトによって固定し、吸着部40揺動範囲を規制する揺動規制部30D及び吸着部40を傾斜状態から起立状態に戻す起立規制部30Eを有するガイド部30に吸着部40を揺動可能に設置し、変位部20の押圧傾斜23Eに被押圧突起41Bを押圧させて吸着部40を揺動規制部30Dまで傾斜させ、永久磁石43を傾斜離間させてから起立規制部30Eによって被吸着物から離間させる。
【選択図】図1
特許請求の範囲
【請求項1】
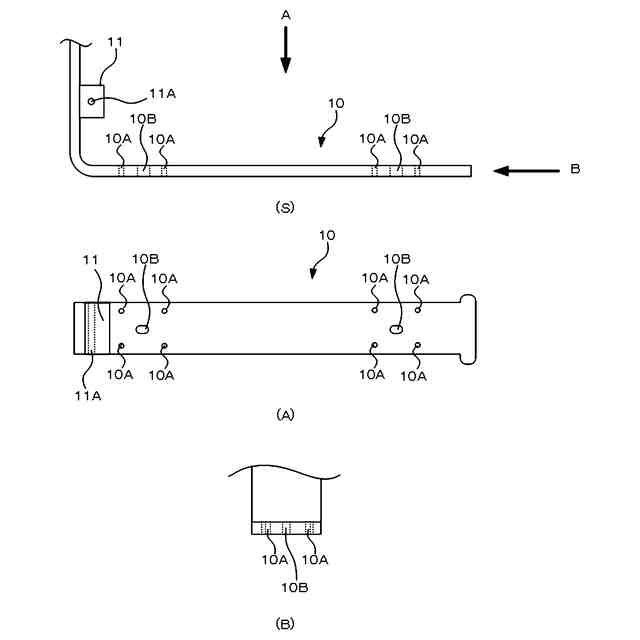
厚み方向に貫通するベース部揺動孔を有し、ロボット装置のハンドに駆動リンクを有する駆動部を介して固定されるベース部と、
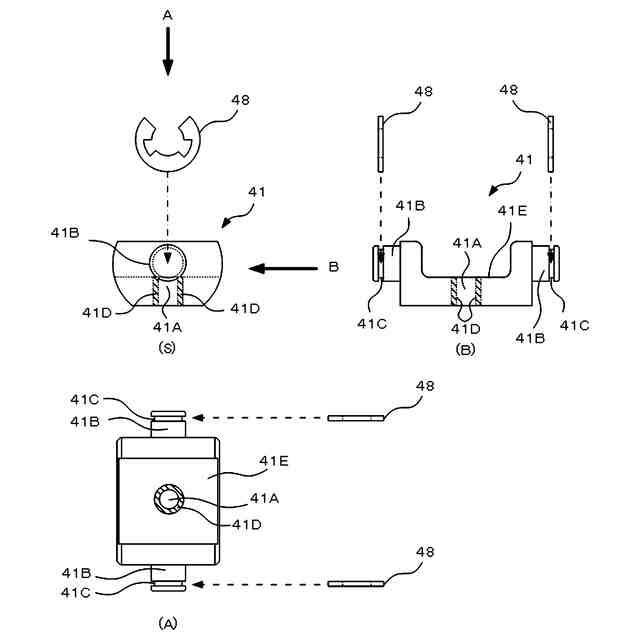
正面及び背面に被押圧突起を一つずつ有し、底面が平面状をなし、側面に曲面を有する揺動部、前記ベース部揺動孔に挿通され、前記揺動部に永久磁石を固定する支柱ボルト、及び前記永久磁石を被吸着物の方向に付勢する弾性体を備える吸着部と、
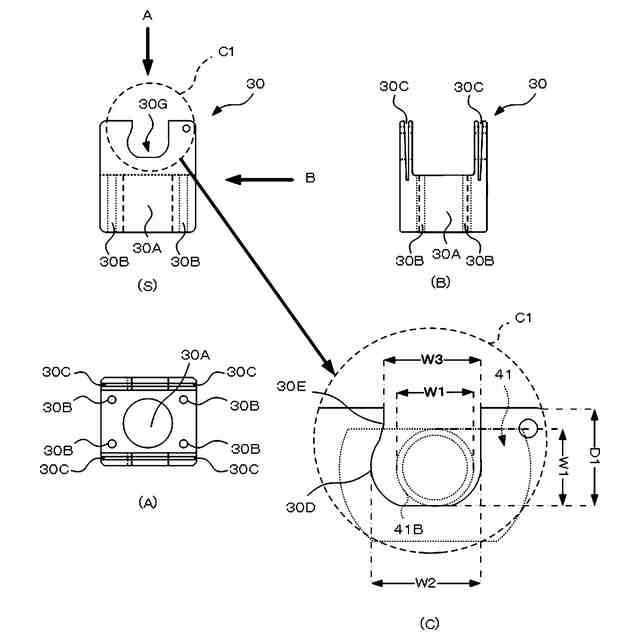
正面視の上端部に開放し、前記吸着部の揺動範囲を規制する揺動規制部、及び前記揺動規制部の上端部に設けられ、前記吸着部を傾斜状態から起立状態に戻す起立規制部を有する揺動規制溝を備え、側面視の手前側から奥側に向かって切り欠かれ、前記揺動部を揺動可能に支持する揺動平面を形成する揺動受溝、及び前記揺動受溝と底面とを連通するガイド部揺動孔を有し、前記ベース部に前記ベース部揺動孔と前記ガイド部揺動孔が連通するように固定されるガイド部と、
前記被押圧突起を位置決めする位置決凹部、前記位置決凹部の端部から0°より大きく、90°より小さい角度θ1を付けて上方に立ち上がり、前記被押圧突起を押圧して前記吸着部を前記揺動規制部まで傾斜させて前記永久磁石を前記被吸着物から傾斜離間させ、前記起立規制部を介して前記吸着部を起立させる押圧傾斜、及び前記押圧傾斜の前記位置決凹部の反対側端部に配置され、前記被押圧突起を押し上げて前記吸着部を上方に変位させ、前記永久磁石を前記被吸着物から離間させる離間変位部を有する変位作動部を備え、前記駆動リンクの変位によって変位する変位部と、
を備えるエンドエフェクタ。
続きを表示(約 54 文字)
【請求項2】
請求項1に記載のエンドエフェクタを前記ハンドの先端部に装着するロボット装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、エンドエフェクタ及びロボット装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
産業用ロボットのハンドの末端にはエンドエフェクタが取り付けられる。特によく用いられるエンドエフェクタには、作業対象物品であるワークを把持し、把持したワークを移動させ、移動させたワークを解放するという、物品把持用のエンドエフェクタである。
【0003】
物品把持用のエンドエフェクタの把持方法には、マニピュレータによって物品を挟むことにより把持するもの、陰圧のエアによって吸着するもの、静電気によって物品を吸着するもの、磁力によって物品を吸着するものなどがある。これらのうち、磁力によって物品を吸着するエンデエフェクタは、製造コストを低く押させることができるというメリットがある。
【0004】
従来の永久磁石を用いる磁力式エンドエフェクタは、ワークを解放する際に、ワークを吸着する磁束の向きの反対方向に力を加え、永久磁石を引き離していた(例えば、特許文献1)。
【0005】
従って、ワークから永久磁石を引き離すソレノイドやリンクなどの機構を、永久磁石を挟んでワークの対向方向に配置する必要があり、エンドエフェクタの高さ方向の厚みが厚くなっていた。エンドエフェクタの高さ方向の厚みが厚くなると、例えば複数の収容段を有する棚などにワークを収容している場合、エンドエフェクタと棚板とが物理干渉を起こして棚からワークを取り出すことができない。
【先行技術文献】
【特許文献】
【0006】
特許第7107772号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、永久磁石を用いながら、エンドエフェクタの高さ方向の厚みを抑えたエンドエフェクタを提供することである。
【0008】
なお、上記の「背景技術」、および「発明が解決しようとする課題」に記載した内容は、本発明をするに至った契機(きっかけ)を示すものであり、本発明の技術的範囲を限定するものではなく、また、本発明の技術的範囲の限定解釈を許容するものでもない(平成17年(行ケ)第10042号、及び出願日における特許庁審査基準第II部第2章 第2節3.2.1参照。)。
【課題を解決するための手段】
【0009】
本発明は、厚み方向に貫通するベース部揺動孔を有し、ロボット装置のハンドに駆動リンクを有する駆動部を介して固定されるベース部と、正面及び背面に被押圧突起を一つずつ有し、底面が平面状をなし、側面に曲面を有する揺動部、前記ベース部揺動孔に挿通され、前記揺動部に永久磁石を固定する支柱ボルト、及び前記永久磁石を被吸着物の方向に付勢する弾性体を備える吸着部と、正面視の上端部に開放し、前記吸着部の揺動範囲を規制する揺動規制部、及び前記揺動規制部の上端部に設けられ、前記吸着部を傾斜状態から起立状態に戻す起立規制部を有する揺動規制溝を備え、側面視の手前側から奥側に向かって切り欠かれ、前記揺動部を揺動可能に支持する揺動平面を形成する揺動受溝、及び前記揺動受溝と底面とを連通するガイド部揺動孔を有し、前記ベース部に前記ベース部揺動孔と前記ガイド部揺動孔が連通するように固定されるガイド部と、前記被押圧突起を位置決めする位置決凹部、前記位置決凹部の端部から0°より大きく、90°より小さい角度θ1を付けて上方に立ち上がり、前記被押圧突起を押圧して前記吸着部を前記揺動規制部まで傾斜させて前記永久磁石を前記被吸着物から傾斜離間させ、前記起立規制部を介して前記吸着部を起立させる押圧傾斜、及び前記押圧傾斜の前記位置決凹部の反対側端部に配置され、前記被押圧突起を押し上げて前記吸着部を上方に変位させ、前記永久磁石を前記被吸着物から離間させる離間変位部を有する変位作動部を備え、前記駆動リンクの変位によって変位する変位部と、を備えるエンドエフェクタを提供する。
【発明の効果】
【0010】
本発明によれば、永久磁石を用いながら、エンドエフェクタの高さ方向の厚みを抑えたエンドエフェクタを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
トヨタ自動車株式会社
学習装置
16日前
CKD株式会社
把持装置
1日前
ダイセイ株式会社
ロボット自動刻印装置
1日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
瓜生製作株式会社
電動締付工具
9日前
株式会社安川電機
ロボット
1か月前
株式会社マキタ
集塵アタッチメント
8日前
株式会社不二越
垂直多関節ロボット
16日前
株式会社三共コーポレーション
工具保持具
1か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
電動工具
16日前
ニデックインスツルメンツ株式会社
産業用ロボット
29日前
株式会社マキタ
作業機
1か月前
学校法人立命館
ロボットハンド制御システム
1か月前
NTN株式会社
把持装置
1日前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
29日前
株式会社人機一体
有脚ロボット
1か月前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
ファナック株式会社
経路データセット生成
1か月前
国立大学法人東京科学大学
多自由度入力装置用制御装置
8日前
株式会社マキタ
インパクト工具
1か月前
積水ハウス株式会社
固定ピン保持用アタッチメント
1か月前
ダイハツ工業株式会社
ロボット制御システム
1日前
パナソニック株式会社
インパクト工具
1日前
株式会社デンソー
ワーク投入装置
29日前
日本発條株式会社
ケーブルユニット及びその製造方法
29日前
泰芳機械股分有限公司
コレット収納装置
1か月前
カツデン株式会社
回転工具用治具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ