TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025172623
公報種別
公開特許公報(A)
公開日
2025-11-26
出願番号
2024078234
出願日
2024-05-13
発明の名称
モータ制御システム、ロボットシステム、および、モータ制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20251118BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】動作対象に振動を生じさせることなく制御パラメータの自動調整を行うことが可能なモータ制御システム、ロボットシステム、および、モータ制御方法を提供する。
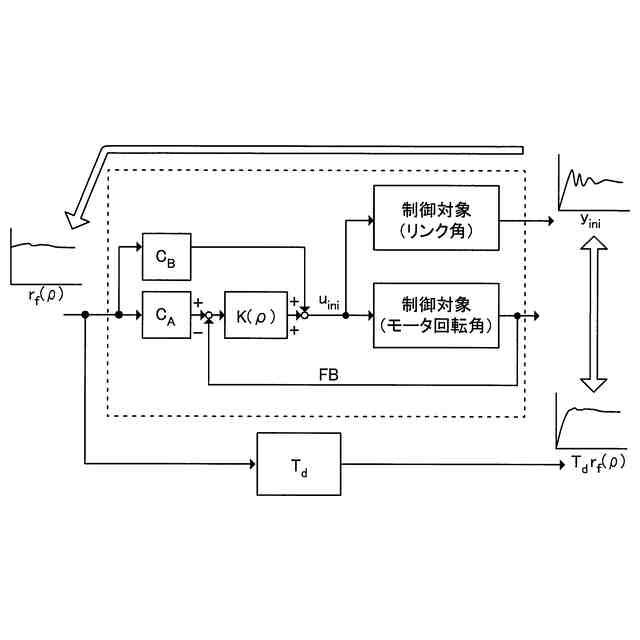
【解決手段】このロボットシステム100は、モータの駆動状態を示すフィードバック値FBを用いたフィードバック制御により動作対象を動作させるとともに、フィードバック値FBとは別個に取得された姿勢情報y
ini
に基づいて、フィードバック制御における制御パラメータρを設定するデータ駆動型制御によって、制御パラメータρを調整する調整動作を行う。
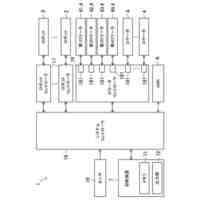
【選択図】図7
特許請求の範囲
【請求項1】
モータと、
前記モータの駆動により動作する動作対象と、
前記モータの駆動状態を示すフィードバック値を用いたフィードバック制御により前記動作対象を動作させるとともに、前記フィードバック値とは別個に取得された前記動作対象の姿勢を示す姿勢情報に基づいて、前記フィードバック制御における制御パラメータを設定するデータ駆動型制御によって、前記制御パラメータを調整する調整動作を行う制御部と、を備える、モータ制御システム。
続きを表示(約 1,700 文字)
【請求項2】
前記制御部は、前記調整動作において、前記フィードバック値とは別個に取得された前記姿勢情報を用いた評価関数により前記制御パラメータを算出することによって、前記データ駆動型制御による前記制御パラメータの調整を行う、請求項1に記載のモータ制御システム。
【請求項3】
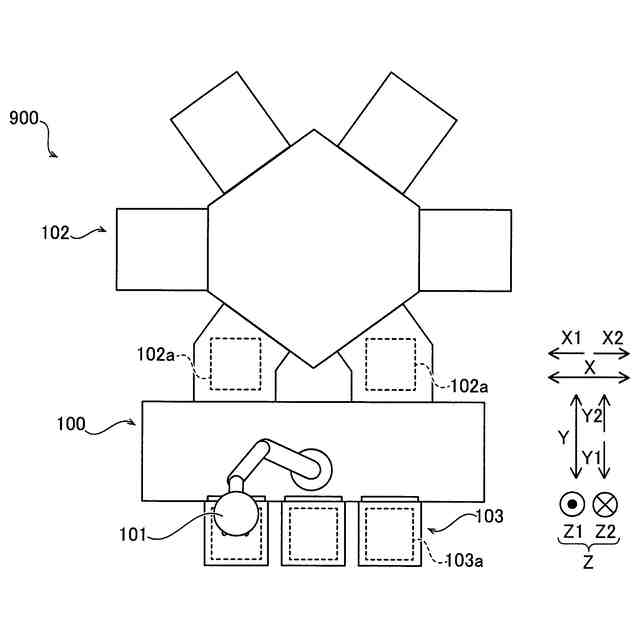
前記動作対象は、互いに接続された複数のリンク部を有するロボットアーム部を含み、
前記制御部は、前記調整動作において、前記フィードバック制御により前記ロボットアーム部を動作させることによって取得された前記ロボットアーム部の姿勢を示す前記姿勢情報に基づいて、前記制御パラメータを調整する、請求項1または2に記載のモータ制御システム。
【請求項4】
前記制御部は、取得された一の前記姿勢情報を用いた前記データ駆動型制御により前記制御パラメータを算出することによって、前記調整動作を行う、請求項1または2に記載のモータ制御システム。
【請求項5】
前記モータは、複数の前記モータを含み、
前記制御部は、前記調整動作において、前記複数のモータを動作させることにより取得された共通の姿勢を示す前記姿勢情報に基づいて、前記複数のモータの各々ごとに対応する複数種類の前記制御パラメータを調整する、請求項1または2に記載のモータ制御システム。
【請求項6】
前記制御部は、
入力された目標値と前記フィードバック値とにより前記モータを動作させるための操作量を出力する前記フィードバック制御により前記モータを駆動させることによって前記動作対象を動作させ、
前記調整動作において、前記操作量と、前記フィードバック値とは別個に取得された前記姿勢情報とに基づいて前記目標値を擬似的に算出した疑似参照入力を取得するとともに、予め設定された目標となる応答特性と、取得された前記疑似参照入力と、取得された前記姿勢情報とを用いた前記評価関数を最適化することによって、前記制御パラメータの調整を行う、請求項2に記載のモータ制御システム。
【請求項7】
前記制御部は、
入力された目標値と前記フィードバック値とにより前記モータを動作させるための操作量を出力する前記フィードバック制御により前記モータを駆動させることによって前記ロボットアーム部を動作させるとともに、
前記調整動作において、前記モータに対するトルク指令または電流指令を含む前記操作量と、前記ロボットアーム部の先端の位置を示す前記姿勢情報とに基づいて、前記データ駆動型制御により前記制御パラメータを調整する、請求項3に記載のモータ制御システム。
【請求項8】
前記動作対象の姿勢を検出するセンサ部をさらに備え、
前記制御部は、前記調整動作において、前記センサ部からの検出信号に基づいて前記姿勢情報を取得することによって、前記データ駆動型制御により前記制御パラメータを調整する、請求項1または2に記載のモータ制御システム。
【請求項9】
前記モータの回転角を検出する回転角検出部をさらに備え、
前記制御部は、
前記回転角検出部による検出結果に基づいて、前記モータの駆動状態を示す前記フィードバック値を取得し、
前記調整動作において、前記回転角検出部による検出結果に基づいて取得される前記フィードバック値とは別個に、前記回転角検出部による検出結果に基づいて前記姿勢情報を推定するとともに、推定された前記姿勢情報に基づいて前記データ駆動型制御により前記制御パラメータを調整する、請求項1または2に記載のモータ制御システム。
【請求項10】
前記制御部は、前記調整動作において、前記モータに流される電流の大きさが所定の電流上限値に到達した場合に、前記姿勢情報を取得するための前記ロボットアーム部の動作を変更する、請求項3に記載のモータ制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、モータ制御システム、ロボットシステム、および、モータ制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、モータ制御システムが開示されている。特許文献1には、電動機を制御する電動機制御装置が記載されている。この電動機制御装置では、指令信号と、電動機の動作量とが一致するように電動機を制御するフィードバックループが構成されている。また、特許文献1に記載の電動機制御装置は、フィードバック制御における制御ゲインを自動的に調整するために、駆動信号に掃引正弦波の外乱信号を加えることによって電動機による動作に振動を生じさせる。そして、外乱信号により生じた振動の大きさおよび周波数に基づいて制御ゲインが自動調整される。
【先行技術文献】
【特許文献】
【0003】
特許第5206994号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の電動機制御装置のように、制御パラメータとしての制御ゲインの自動調整において外乱信号を加える場合には、電動機の駆動により動作する動作対象に振動が生じる。この場合には、生じた振動に起因して、動作対象が周囲に配置された部材に対して物理的に干渉する場合がある。そこで、動作対象に振動を生じさせることなく制御パラメータの自動調整を行うことが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、動作対象に振動を生じさせることなく制御パラメータの自動調整を行うことが可能なモータ制御システム、ロボットシステム、および、モータ制御方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面によるモータ制御システムは、モータと、モータの駆動により動作する動作対象と、モータの駆動状態を示すフィードバック値を用いたフィードバック制御により動作対象を動作させるとともに、フィードバック値とは別個に取得された動作対象の姿勢を示す姿勢情報に基づいて、フィードバック制御における制御パラメータを設定するデータ駆動型制御によって、制御パラメータを調整する調整動作を行う制御部と、を備える。
【0007】
この開示の第1の局面によるモータ制御システムは、上記のように、モータの駆動状態を示すフィードバック値を用いたフィードバック制御により動作対象を動作させるとともに、フィードバック値とは別個に取得された動作対象の姿勢を示す姿勢情報に基づいて、フィードバック制御における制御パラメータを設定するデータ駆動型制御によって、制御パラメータを調整する調整動作を行う制御部を備えている。これにより、動作対象に振動を生じさせることなく、データ駆動型制御によって姿勢情報に基づいて制御パラメータを調整できる。その結果、動作対象に振動を生じさせることなく制御パラメータの自動調整を行うことができる。
【0008】
この開示の第2の局面によるロボットシステムは、モータと、互いに接続された複数のリンク部を有し、モータの駆動により動作するロボットアーム部と、モータの駆動状態を示すフィードバック値を用いたフィードバック制御によりロボットアーム部を動作させるとともに、フィードバック値とは別個に取得されたロボットアーム部の姿勢を示す姿勢情報に基づいて、フィードバック制御における制御パラメータを設定するデータ駆動型制御によって、制御パラメータを調整する調整動作を行う制御部と、を備える。
【0009】
この開示の第2の局面によるロボットシステムは、上記のように、モータの駆動状態を示すフィードバック値を用いたフィードバック制御によりロボットアーム部を動作させるとともに、フィードバック値とは別個に取得されたロボットアーム部の姿勢を示す姿勢情報に基づいて、フィードバック制御における制御パラメータを設定するデータ駆動型制御によって、制御パラメータを調整する調整動作を行う制御部を備えている。これにより、動作対象に振動を生じさせることなく、データ駆動型制御によって姿勢情報に基づいて制御パラメータを調整できる。その結果、動作対象に振動を生じさせることなく制御パラメータの自動調整を行うことが可能なロボットシステムを提供できる。
【0010】
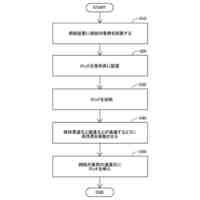
この開示の第3の局面によるモータ制御方法は、モータの駆動により動作する動作対象を、モータの駆動状態を示すフィードバック値を用いたフィードバック制御により動作させることによって、フィードバック値とは別個に動作対象の姿勢を示す姿勢情報を取得することと、フィードバック値とは別個に取得された姿勢情報に基づいて、フィードバック制御における制御パラメータを設定するデータ駆動型制御によって、制御パラメータを調整することと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1か月前
川崎重工業株式会社
断熱配管
1か月前
川崎重工業株式会社
ダクト継手
1か月前
川崎重工業株式会社
水中構造体
28日前
川崎重工業株式会社
監視システム
1か月前
川崎重工業株式会社
塗装システム
1か月前
川崎重工業株式会社
配管の支持構造
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
遠心式ターボ機械
27日前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
多段遠心ターボ機械
1か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
川崎重工業株式会社
ダイクッション装置
27日前
川崎重工業株式会社
バーナおよび燃焼器
28日前
川崎重工業株式会社
極低温流体用配管設備
1か月前
川崎重工業株式会社
多段ラジアルタービン
19日前
川崎重工業株式会社
ガスタービンエンジン
29日前
川崎重工業株式会社
締結方法及び締結装置
1か月前
川崎重工業株式会社
ロボットの診断システム
1か月前
川崎重工業株式会社
航空機の電気機械システム
29日前
株式会社キッツ
逆流防止弁
1か月前
川崎重工業株式会社
支援システムおよび支援方法
1か月前
川崎重工業株式会社
経路作成方法及び経路作成装置
1か月前
川崎重工業株式会社
付加製造方法及び付加製造装置
27日前
川崎重工業株式会社
付加製造方法及び付加製造装置
27日前
川崎重工業株式会社
クローズドインペラの製造方法
1か月前
川崎重工業株式会社
情報処理装置および情報提供方法
今日
川崎重工業株式会社
ガス燃料供給システムおよび船舶
1か月前
川崎重工業株式会社
アンモニア回収システム及び方法
1か月前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
27日前
川崎重工業株式会社
配管の接続構造および配管システム
1か月前
横浜ゴム株式会社
多層空洞音響材
19日前
川崎重工業株式会社
ロボットシステム及びその動作方法
1か月前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
27日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ