TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086763
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023201032
出願日
2023-11-28
発明の名称
ロボットシステム、及びロボットシステムの製造方法
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250602BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットに対する動作教示の作業性向上に有効なシステムを提供する。
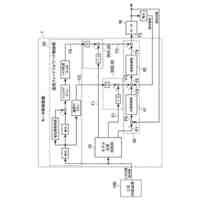
【解決手段】ロボットシステム1は、手先の位置を変更可能なアーム10を有するロボット2と、ロボット2を制御するロボット2コントローラと、を備え、ロボット2コントローラは、アーム10の構造に起因した動作の誤差要因を表す要因情報を記憶する要因記憶部112と、ロボット2の動作を表す教示位置と、要因情報とに基づいて、誤差要因に起因した動作誤差が低減するように、ロボット2を制御するロボット制御部113と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
手先の位置を変更可能なアームを有するロボットと、
前記ロボットを制御するロボットコントローラと、
を備え、
前記ロボットコントローラは、
前記アームの構造に起因した動作の誤差要因を表す要因情報を記憶する要因記憶部と、
前記ロボットの動作を表す教示位置と、前記要因情報とに基づいて、前記誤差要因に起因した動作誤差が低減するように、前記ロボットを制御するロボット制御部と、
を有する、
ロボットシステム。
続きを表示(約 2,200 文字)
【請求項2】
前記ロボット制御部は、
前記教示位置と、前記要因情報とに基づいて、前記教示位置までの前記ロボットの経由位置を表す位置指令を順次生成する指令生成部と、
順次生成された前記位置指令により前記ロボットを制御する動作制御部と、
を有する、
請求項1記載のロボットシステム。
【請求項3】
前記誤差要因は前記アームのコンプライアンスを含み、
前記指令生成部は、
前記教示位置に基づいて仮の位置指令を生成し、
前記仮の位置指令と前記コンプライアンスとに基づいて前記アームの撓みを算出し、
前記撓みと前記仮の位置指令とに基づいて前記位置指令を生成する、
請求項2記載のロボットシステム。
【請求項4】
前記誤差要因は前記アームの寸法誤差を更に含み、
前記指令生成部は、
前記仮の位置指令と前記コンプライアンスとに基づいて前記アームの前記撓みを算出し、
前記仮の位置指令と前記寸法誤差と前記撓みとに基づいて前記位置指令を生成する、
請求項3記載のロボットシステム。
【請求項5】
前記要因情報に基づいて、前記ロボットの動作履歴を、前記動作誤差が低減されなかった場合の前記動作履歴に変換する履歴変換部と、
前記誤差要因を含まない前記ロボットのモデルと、変換後の前記動作履歴とに基づいて、前記ロボットの動作を仮想空間で再現するシミュレータと、
を更に備える、
請求項2~4のいずれか一項記載のロボットシステム。
。
【請求項6】
前記要因情報を前記ロボットコントローラが有する前記要因記憶部から取得して、前記ロボットコントローラ外の第2要因記憶部に記憶させる要因複製部
を更に備え、
前記履歴変換部は、前記第2要因記憶部が記憶する前記要因情報に基づいて、前記動作履歴を、前記動作誤差が低減されなかった場合の前記動作履歴に変換する、
請求項5記載のロボットシステム。
【請求項7】
前記ロボットの動作履歴を、前記位置指令及び仮の位置指令の少なくともいずれかに対応付けて記憶する履歴記憶部と、
前記要因情報に基づいて、前記ロボットの動作履歴を、前記動作誤差が低減されなかった場合の前記動作履歴に変換する履歴変換部と、
前記誤差要因を含まない前記ロボットのモデルと、変換後の前記動作履歴とに基づいて、前記ロボットの動作を仮想空間で再現するシミュレータと、
を更に備える、
請求項3又は4記載のロボットシステム。
【請求項8】
ユーザによるマニュアル操作に基づいて前記教示位置を生成し、生成した前記教示位置と、前記要因情報とに基づいて、前記動作誤差が低減するように前記ロボットを制御するマニュアル制御部と、
前記ユーザによる登録要求に応じて、前記マニュアル操作に基づく前記教示位置を、教示位置記憶部に記憶させる教示位置登録部と、
を更に備え、
前記ロボット制御部は、前記教示位置記憶部に記憶された前記教示位置と、前記要因情報とに基づいて、前記動作誤差が低減するように、前記ロボットを制御する、
請求項1~4のいずれか一項記載のロボットシステム。
【請求項9】
前記マニュアル制御部による前記要因情報の反映の有無を切り替える切替部を更に備え、
前記マニュアル制御部は、
前記要因情報の反映有である場合に、前記マニュアル操作に基づく前記教示位置と、前記要因情報とに基づいて前記ロボットを制御し、
前記要因情報の反映無である場合に、前記要因情報に基づかずに、前記マニュアル操作に基づく前記教示位置に基づいて前記ロボットを制御し、
前記教示位置登録部は、前記マニュアル操作に基づく前記教示位置に対する前記要因情報の反映の有無を反映情報として、前記マニュアル操作に基づく前記教示位置に対応付けて前記教示位置記憶部に記憶させ、
前記ロボット制御部は、
前記教示位置に対応する前記反映情報が前記要因情報の反映有を表す場合、前記教示位置と、前記要因情報とに基づいて前記ロボットを制御し、
前記教示位置に対応する前記反映情報が前記要因情報の反映無を表す場合、前記要因情報に基づかずに、前記教示位置に基づいて前記ロボットを制御する、
請求項8記載のロボットシステム。
【請求項10】
前記教示位置を、前記ロボット制御部による前記要因情報の反映の有無を表す反映情報と対応付けて記憶する教示位置記憶部を更に備え、
前記ロボット制御部は、
前記教示位置に対応する前記反映情報が前記要因情報の反映有を表す場合、前記教示位置と、前記要因情報とに基づいて前記ロボットを制御し、
前記教示位置に対応する前記反映情報が前記要因情報の反映無を表す場合、前記要因情報に基づかずに、前記教示位置に基づいて前記ロボットを制御する、
請求項1~4のいずれか一項記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム、及びロボットシステムの製造方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、コントローラと、操作用デバイスとを備える制御システムが開示されている。操作用デバイスは、操作者による操作入力を取得し、操作入力に基づく指令を生成してコントローラに出力する。コントローラは、操作用デバイスからの指令に従ってロボットを制御する。
【先行技術文献】
【特許文献】
【0003】
特開2019-198925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、ロボットに対する動作教示の作業性向上に有効なシステムを提供する。
【課題を解決するための手段】
【0005】
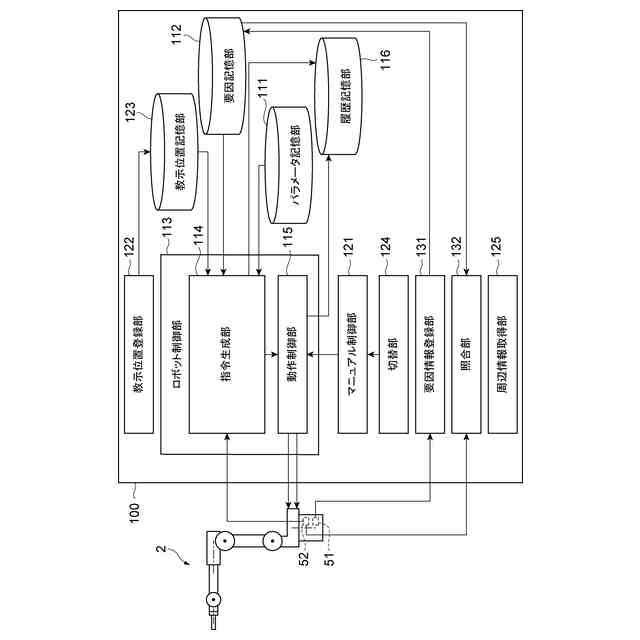
本開示の一側面に係るロボットシステムは、手先の位置を変更可能なアームを有するロボットと、ロボットを制御するロボットコントローラと、を備え、ロボットコントローラは、アームの構造に起因した動作の誤差要因を表す要因情報を記憶する要因記憶部と、ロボットの動作を表す教示位置と、要因情報とに基づいて、誤差要因に起因した動作誤差が低減するように、ロボットを制御するロボット制御部と、を有する。
【0006】
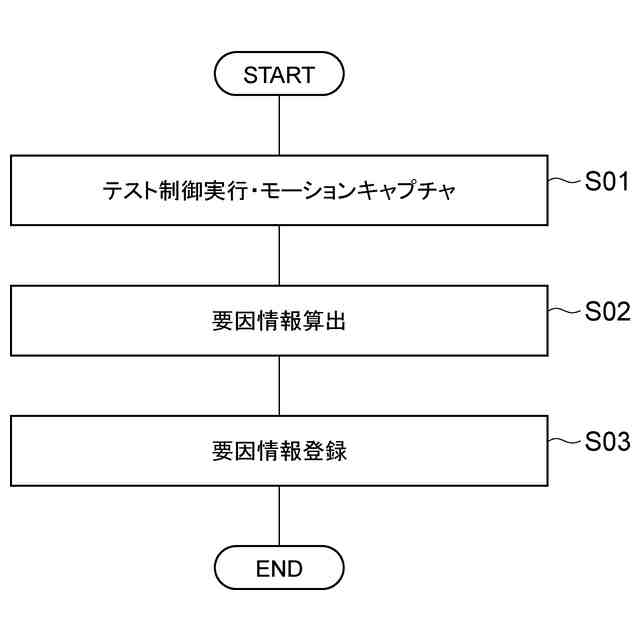
本開示の他の側面に係るロボットシステムの製造方法は、手先位置を変更可能なアームを有するロボットと、ロボットを制御するロボットコントローラとを備えるロボットシステムを製造する方法であって、ロボットコントローラにより、ロボットを予め定められた動作パターンで動作させることと、動作パターンと、ロボットの動作結果とに基づいて、アームの構造に起因した動作の誤差要因を表す要因情報を生成することと、ロボットシステムの記憶部に、要因情報を記憶させることと、を含む。
【発明の効果】
【0007】
本開示によれば、ロボットに対する動作教示の作業性向上に有効なシステムを提供することができる。
【図面の簡単な説明】
【0008】
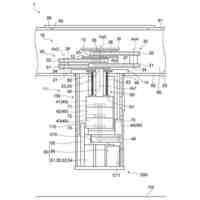
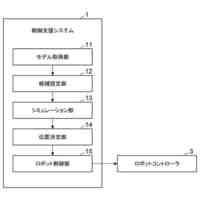
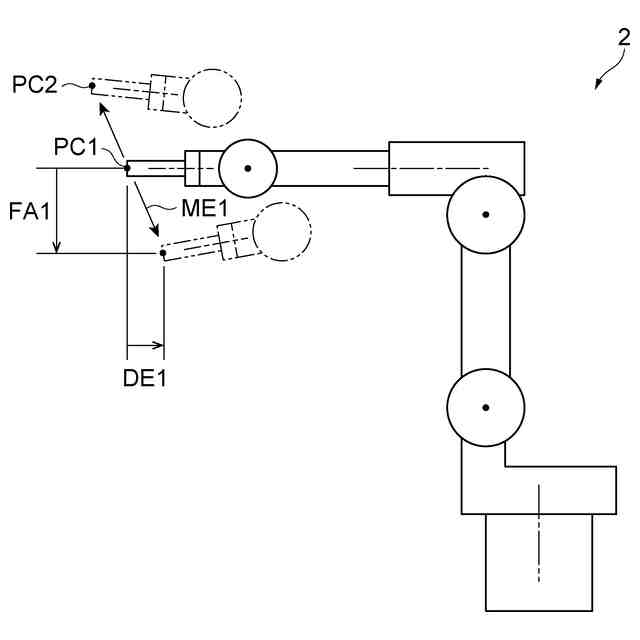
ロボットシステムの構成を例示する模式図である。
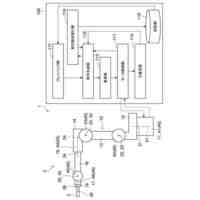
ロボットコントローラの機能的な構成を例示するブロック図である。
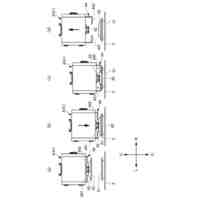
位置指令の補正を例示する模式図である。
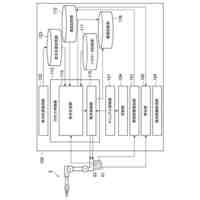
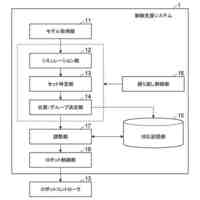
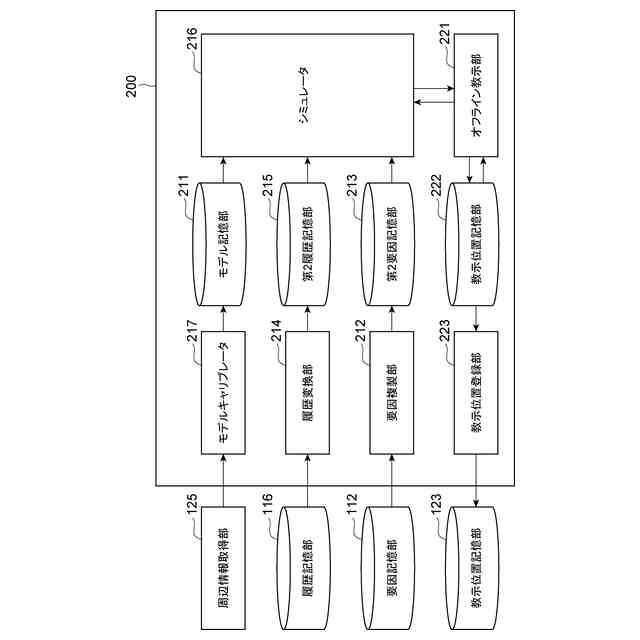
シミュレーション装置の機能的な構成を例示するブロック図である。
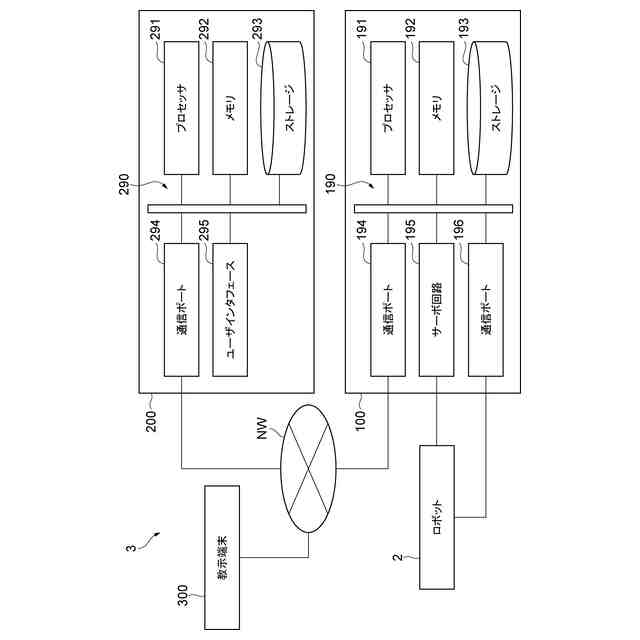
制御システムのハードウェア構成を例示するブロック図である。
ロボットシステムの製造手順を例示するフローチャートである。
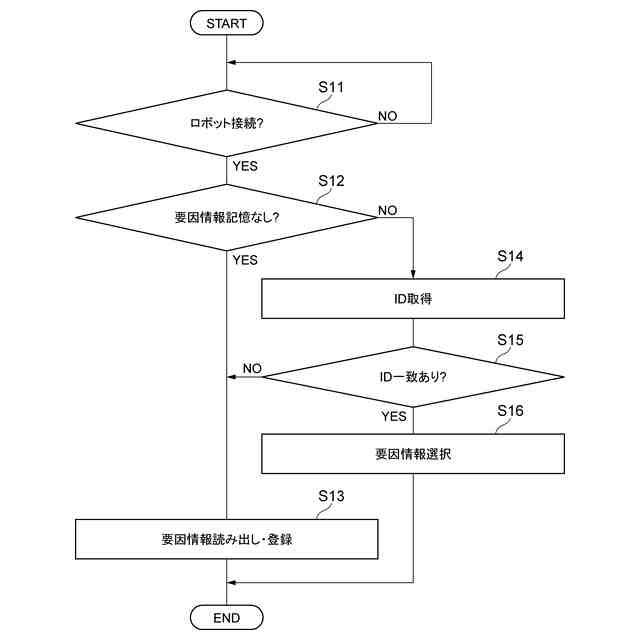
要因情報取得手順を例示するフローチャートである。
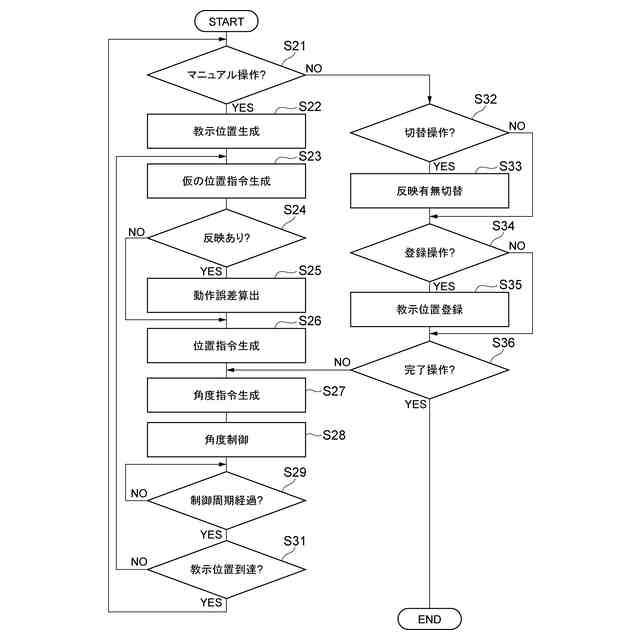
オンライン教示手順を例示するフローチャートである。
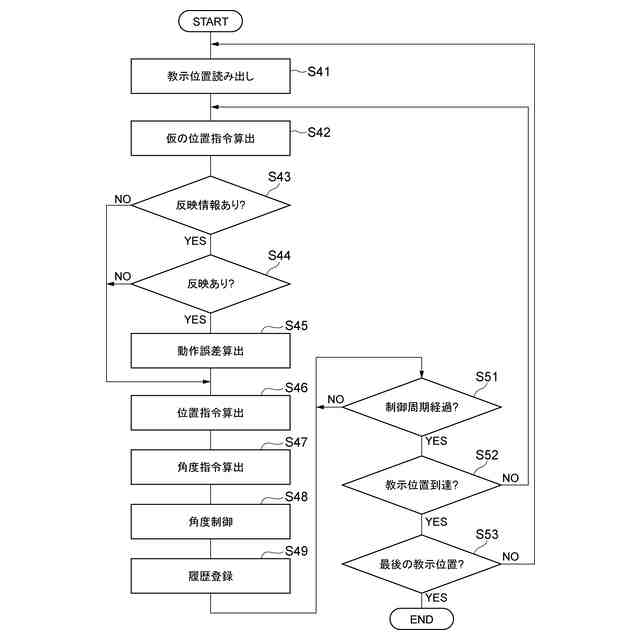
ロボット制御手順を例示するフローチャートである。
周辺情報取得手順を例示するフローチャートである。
動作再現手順を例示するフローチャートである。
オフライン教示手順を例示するフローチャートである。
【発明を実施するための形態】
【0009】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0010】
〔ロボットシステム〕
図1に示すロボットシステム1は、ロボット2に作業を実行させるシステムである。作業の例としては、ワークの搬送、ワークに対する加工、ワークの組付け等、ワークに対する作業が挙げられる。ワークに対する加工の例としては、ワークの研削、ワークの研磨等が挙げられる。ワークの組付けの例としては、ボルト締結等による複数の部品(ワークの部品)同士の締結、溶接による複数の部品同士の接合等が挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
摩耗情報算出システム
1か月前
株式会社安川電機
ロボットシステム及び制御方法
1か月前
株式会社安川電機
ロボット、ロボットの製造方法
2か月前
株式会社安川電機
ロボット、ロボットの製造方法
2か月前
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
23日前
キユーピー株式会社
蓋閉め装置および蓋閉め方法
1か月前
株式会社安川電機
ロボットシステム、及びロボットシステムの製造方法
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
26日前
株式会社ダイヘン
搬送装置
1か月前
住友重機械工業株式会社
教示装置
23日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
川崎重工業株式会社
ロボット
24日前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
ホシデン株式会社
分解用治具
1か月前
アピュアン株式会社
衝撃工具
1か月前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社マキタ
電気機器
24日前
株式会社不二越
協働ロボットシステム
1日前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ