TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089142
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2023204165
出願日
2023-12-01
発明の名称
摩耗情報算出システム
出願人
株式会社安川電機
代理人
弁理士法人はるか国際特許事務所
主分類
F16D
66/02 20060101AFI20250605BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】摩耗状態に関する情報を精度良く算出する。
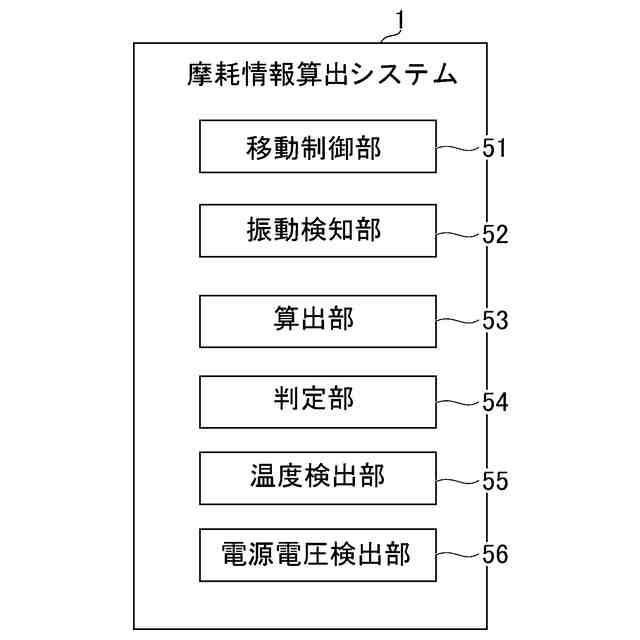
【解決手段】ブレーキ(B)が備える回転体及び非回転体の少なくともいずれか一方の摩耗状態に関する情報を算出する摩耗情報算出システム(1)であって、非回転体を、回転体に接して当該回転体の回転を停止させる位置であって摩耗状態に応じて変位する変位位置と、回転体から離間する所定の固定位置と、の間で移動させる移動制御部(51)と、非回転体が固定位置に到達した際に生じる振動を検知する振動検知部(52)と、非回転体を変位位置から固定位置へ移動させるための指令に基づく計測開始タイミングから振動検知部(52)が振動を検知するまでの計測時間に基づいて、摩耗状態に関する情報を算出する算出部(53)と、を有する。
【選択図】図3
特許請求の範囲
【請求項1】
ブレーキが備える回転体及び非回転体の少なくともいずれか一方の摩耗状態に関する情報を算出する摩耗情報算出システムであって、
前記非回転体を、前記回転体に接して当該回転体の回転を停止させる位置であって前記摩耗状態に応じて変位する変位位置と、前記回転体から離間する所定の固定位置と、の間で移動させる移動制御部と、
前記非回転体が前記固定位置に到達した際に生じる振動を検知する振動検知部と、
前記非回転体を前記変位位置から前記固定位置へ移動させるための指令に基づく計測開始タイミングから前記振動検知部が振動を検知するまでの計測時間に基づいて、前記摩耗状態に関する情報を算出する算出部と、
を有する摩耗情報算出システム。
続きを表示(約 1,300 文字)
【請求項2】
前記計測時間は、前記計測開始タイミングから前記振動検知部による検出値が所定の閾値以上となるまでの時間である、
請求項1に記載の摩耗情報算出システム。
【請求項3】
前記算出部は、
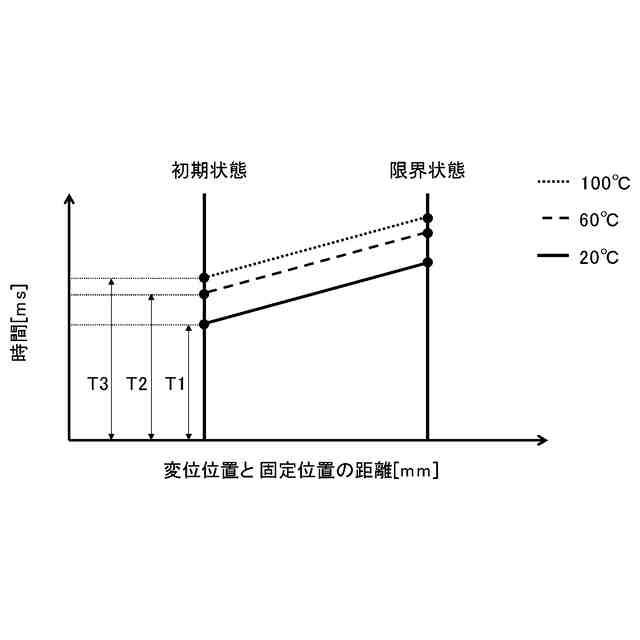
前記摩耗状態が第一の状態の場合における前記振動を検知するまでの時間である第一の時間と、前記摩耗状態が前記第一の状態よりも摩耗量が少ない第二の状態の場合における前記振動を検知するまでの時間である第二の時間と、の差分に対する、前記計測時間と前記第二の時間との差分の割合である摩耗率を、前記摩耗状態に関する情報として算出する、
請求項1に記載の摩耗情報算出システム。
【請求項4】
前記第一の時間は、前記摩耗状態が限界状態の場合における前記振動を検知するまでの時間であり、
前記第二の時間は、前記摩耗状態が初期状態の場合における前記振動を検知するまでの時間である、
請求項3に記載の摩耗情報算出システム。
【請求項5】
前記ブレーキはブレーキコイルを含み、
前記移動制御部は、前記ブレーキコイルの通電状態を制御することで、前記変位位置と前記固定位置との間で前記非回転体を移動させ、
前記算出部は、所定の前記第一の時間及び前記第二の時間に基づいて前記摩耗率を算出する、
請求項3又は4に記載の摩耗情報算出システム。
【請求項6】
少なくとも前記ブレーキコイルの周辺の温度を検出する温度検出部を有し、
前記算出部は、前記温度に応じて前記第一の時間及び前記第二の時間を取得し、取得した前記第一の時間及び前記第二の時間に基づいて前記摩耗率を算出する、
請求項5に記載の摩耗情報算出システム。
【請求項7】
前記算出部は、前記ブレーキの電源電圧に応じて前記第一の時間及び前記第二の時間を取得し、取得した前記第一の時間及び前記第二の時間に基づいて前記摩耗率を算出する、
請求項3又は4に記載の摩耗情報算出システム。
【請求項8】
前記摩耗状態に関する情報に基づいて、前記ブレーキが正常であるか否かを判定する判定部を有する、
請求項1に記載の摩耗情報算出システム。
【請求項9】
加速度センサを含み、
前記振動検知部は、少なくとも前記非回転体が移動する方向における前記加速度センサの検出値に基づいて前記振動を検知する、
請求項1に記載の摩耗情報算出システム。
【請求項10】
前記ブレーキは、共通の機構に設けられる第1のブレーキ及び第2のブレーキを含み、
前記算出部は、
前記第1のブレーキが備える前記非回転体が前記変位位置から前記固定位置への移動を開始するタイミングを、前記第2のブレーキが備える前記非回転体が前記変位位置から前記固定位置への移動を開始するタイミングと異なるタイミングとして、前記第1のブレーキ及び第2のブレーキの摩耗状態に関する情報をそれぞれ算出する、
請求項1に記載の摩耗情報算出システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、摩耗情報算出システム、摩耗情報算出方法、及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
下記特許文献1には、ブレーキ解除時間に基づいて電磁ブレーキが摩耗していることを検出する摩耗検出装置が開示されている。特許文献1においてブレーキ解除時間とは、モータの回転軸に取り付けられた部材の重量によりモータが回転角度を保持するように制御されている状態で、ブレーキ制御信号が検出されたタイミングから、モータの回転角度を検出する回転角度センサの回転角度検出値が変化するタイミングまでの時間である。
【先行技術文献】
【特許文献】
【0003】
特開2019-2471号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、特許文献1の摩耗検出装置においては、回転軸の向きによっては、回転軸に取り付けられた部材の重量によるモータの回転角度の変化量が小さくなり、摩耗検出を行うことが困難となる。また、ブレーキ解除における瞬間的な回転動作に基づいて摩耗検出を行っていることより、安定して精度の良い検出を行うのは困難である。
【0005】
本開示の目的の1つは、摩耗状態に関する情報を精度良く算出可能な摩耗情報算出システム、摩耗情報算出方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一側面に係る摩耗情報算出システムは、ブレーキが備える回転体及び非回転体の少なくともいずれか一方の摩耗状態に関する情報を算出する摩耗情報算出システムであって、前記非回転体を、前記回転体に接して当該回転体の回転を停止させる位置であって前記摩耗状態に応じて変位する変位位置と、前記回転体から離間する所定の固定位置と、の間で移動させる移動制御部と、前記非回転体が前記固定位置に到達した際に生じる振動を検知する振動検知部と、前記非回転体を前記変位位置から前記固定位置へ移動させるための指令に基づく計測開始タイミングから前記振動検知部が振動を検知するまでの計測時間に基づいて、前記摩耗状態に関する情報を算出する算出部と、を有する。
【発明の効果】
【0007】
本開示によれば、摩耗状態に関する情報を精度良く算出することができる。
【図面の簡単な説明】
【0008】
摩耗情報算出システムのハードウェア構成の一例を示す図である。
制動状態にあるモータ及びブレーキを模式的に示す断面図である。
解除状態にあるモータ及びブレーキを模式的に示す断面図である。
摩耗情報算出システムで実現される機能の一例を示す図である。
計測時間を説明するためのタイミングチャートである。
環境温度に応じて計測時間が変化することを説明するための図である。
摩耗情報算出システムで実行される処理を示すフローチャートである。
ロボットアームの一例を模式的に示す図である。
変形例における計測開始タイミングについて説明する図である。
【発明を実施するための形態】
【0009】
[摩耗情報算出システムの全体構成]
図1は、摩耗情報算出システムのハードウェア構成の一例を示す図である。摩耗情報算出システム1は、ブレーキBにおける摩耗状態に関する情報を算出するシステムである。摩耗情報算出システム1は、上位制御装置10、駆動制御装置20、モータM、ブレーキB、エンコーダE、及び加速度センサAを含む。なお、図1に示すハードウェア構成は一例であって、これに限られるものではなく、摩耗情報算出システム1は少なくとも1つのコンピュータを含んでいればよい。また、例えば、上位制御装置10や駆動制御装置20はそれぞれ複数のコンピュータで構成されていてもよい。また、図示は省略するが、摩耗情報算出システム1はユーザが操作する装置を含んでもよい。
【0010】
上位制御装置10は、モータMの動作を制御するモータ指令を生成し、駆動制御装置20に送信する。モータ指令は、モータMの回転位置を制御する位置指令、モータMの角速度を制御する速度指令、モータMのトルクを制御するトルク指令等であるとよい。また、上位制御装置10は、ブレーキBの動作を制御するブレーキ指令を生成し、駆動制御装置20に送信する。上位制御装置10は、例えば汎用のパーソナルコンピュータ、PLC(Programable Logic Controller)、モーションコントローラ等で構成されているとよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る








 特許ウォッチ
特許ウォッチ