TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085521
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199451
出願日
2023-11-24
発明の名称
アキシャルギャップモータ、ロボット、ロボットシステム
出願人
株式会社安川電機
代理人
弁理士法人第一テクニカル国際特許事務所
主分類
H02K
3/04 20060101AFI20250529BHJP(電力の発電,変換,配電)
要約
【課題】アキシャルギャップモータの外径寸法を小型化する。
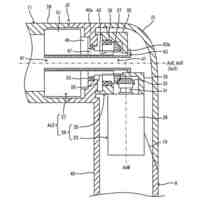
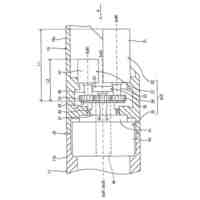
【解決手段】第1モータ101及び第2モータ201は、回転軸AX3を中心に回転するロータ120,220と、ロータ120,220と回転軸AX3の方向に対向するステータ110,210と、ステータ110,210に備えられたバックヨーク部403と、バックヨーク部403から回転軸AX3の方向における一方側に向けて突出した複数のティース407と、複数のティース407に装着された複数のコイル405と、バックヨーク部403に対して回転軸AX3の方向における他方側に配置され、複数のコイル405から引き出された複数の引き出し線411を接続する結線基板413と、を有する。
【選択図】図13
特許請求の範囲
【請求項1】
回転軸を中心に回転するロータと、
前記ロータと前記回転軸の方向に対向するステータと、
前記ロータ及び前記ステータのいずれか一方に備えられた第1バックヨークと、
前記第1バックヨークから前記回転軸の方向における一方側に向けて突出した複数のティースと、
前記複数のティースに装着された複数のコイルと、
前記第1バックヨークに対して前記回転軸の方向における他方側に配置され、前記複数のコイルから引き出された複数の引き出し線を接続する結線部と、
を有するアキシャルギャップモータ。
続きを表示(約 1,400 文字)
【請求項2】
前記第1バックヨークは、
前記回転軸の方向における前記他方側に凹部を備えており、
前記結線部は、
前記凹部に収容されている、
請求項1に記載のアキシャルギャップモータ。
【請求項3】
前記第1バックヨークは、
前記回転軸を中心とする径方向において前記ティースよりも内側に開口部を備えており、
前記複数の引き出し線は、
前記開口部を通って前記結線部に接続されている、
請求項1又は2に記載のアキシャルギャップモータ。
【請求項4】
前記引き出し線と前記開口部の内周面との間に配置され、絶縁材料で構成された絶縁部をさらに有する、
請求項3に記載のアキシャルギャップモータ。
【請求項5】
外周面に前記コイルが巻かれて前記ティースに装着される、前記絶縁材料で構成されたボビンをさらに有し、
前記絶縁部は、
前記ボビンから前記開口部の内側に向けて突出した突起部である、
請求項4に記載のアキシャルギャップモータ。
【請求項6】
前記引き出し線は、
前記コイルから前記突起部の突出方向に沿って引き出されている、
請求項5に記載のアキシャルギャップモータ。
【請求項7】
前記開口部の前記内周面には、
前記突起部が嵌合する溝部が形成されている、
請求項5に記載のアキシャルギャップモータ。
【請求項8】
前記結線部は、
前記複数の引き出し線を接続するための結線パターンが形成された結線基板であり、
前記突起部は、
前記回転軸の方向における前記他方側の先端に端面を有し、
前記結線基板は、
前記端面に接触又は前記端面と対向するように配置されている、
請求項5に記載のアキシャルギャップモータ。
【請求項9】
前記ロータ及び前記ステータのいずれか他方に備えられた第2バックヨークと、
前記第2バックヨークに前記回転軸周りの周方向に沿って配置された複数の磁石と、
をさらに有し、
前記複数の磁石は、
前記周方向に等角度間隔で配置された複数の第1磁石と、
前記複数の第1磁石の相互間に1つずつ配置され、前記周方向に隣接する2つの前記第1磁石の中心角度から所定の第1角度だけずれた位置に配置された複数の第2磁石と、を有する、
請求項1に記載のアキシャルギャップモータ。
【請求項10】
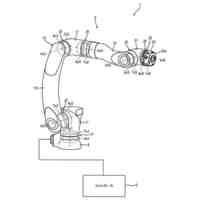
アキシャルギャップモータを関節部に配置したロボットであって、
前記アキシャルギャップモータは、
回転軸を中心に回転するロータと、
前記ロータと前記回転軸の方向に対向するステータと、
前記ロータ及び前記ステータのいずれか一方に備えられた第1バックヨークと、
前記第1バックヨークから前記回転軸の方向における一方側に向けて突出した複数のティースと、
前記複数のティースに装着された複数のコイルと、
前記第1バックヨークに対して前記回転軸の方向における他方側に配置され、前記複数のコイルから引き出された複数の引き出し線を接続する結線部と、を有する、
ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、アキシャルギャップモータ、ロボット、及びロボットシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、回転軸に固定されたロータと、ロータの軸方向両側にエアギャップを介して夫々対向する第1ステータおよび第2ステータとを備えたアキシャルギャップ型モータが記載されている。このアキシャルギャップ型モータでは、第1ステータおよび第2ステータは、バックヨークと、バックヨークのロータ側に軸方向に設けられたティースと、ティースに巻回されたコイルとを有しており、コイルの中性点側の結線と電源側の結線を行う結線板がティースに対して半径方向外側に配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-172859号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、結線板がティースの半径方向外側に配置されるため、モータの外径寸法が増大するという課題があった。
【0005】
本発明はこのような問題点に鑑みてなされたものであり、外径寸法を小型化することができるアキシャルギャップモータ、ロボット、及びロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一の観点によれば、回転軸を中心に回転するロータと、前記ロータと前記回転軸の方向に対向するステータと、前記ロータ及び前記ステータのいずれか一方に備えられた第1バックヨークと、前記第1バックヨークから前記回転軸の方向における一方側に向けて突出した複数のティースと、前記複数のティースに装着された複数のコイルと、前記第1バックヨークに対して前記回転軸の方向における他方側に配置され、前記複数のコイルから引き出された複数の引き出し線を接続する結線部と、を有するアキシャルギャップモータが適用される。
【0007】
また、本発明の別の観点によれば、アキシャルギャップモータを関節部に配置したロボットであって、前記アキシャルギャップモータは、回転軸を中心に回転するロータと、前記ロータと前記回転軸の方向に対向するステータと、前記ロータ及び前記ステータのいずれか一方に備えられた第1バックヨークと、前記第1バックヨークから前記回転軸の方向における一方側に向けて突出した複数のティースと、前記複数のティースに装着された複数のコイルと、前記第1バックヨークに対して前記回転軸の方向における他方側に配置され、前記複数のコイルから引き出された複数の引き出し線を接続する結線部と、を有するロボットが適用される。
【0008】
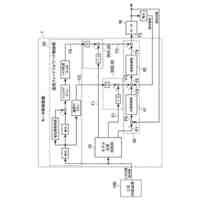
また、本発明の別の観点によれば、上記ロボットと、前記ロボットの動作を制御する制御装置と、を有する、ロボットシステムが適用される。
【発明の効果】
【0009】
本発明のアキシャルギャップモータ等によれば、外径寸法を小型化することができる。
【図面の簡単な説明】
【0010】
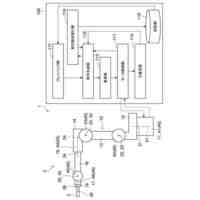
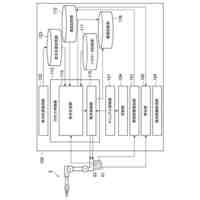
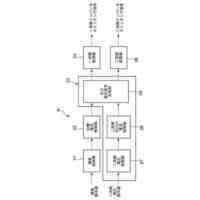
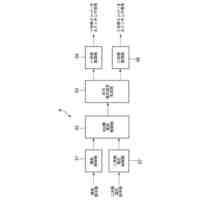
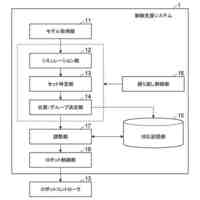
実施形態に係るロボットシステムの全体構成の一例を表す図である。
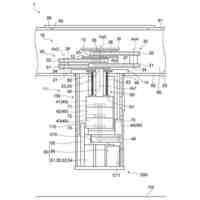
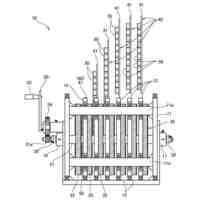
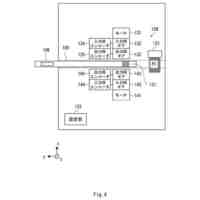
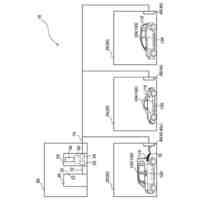
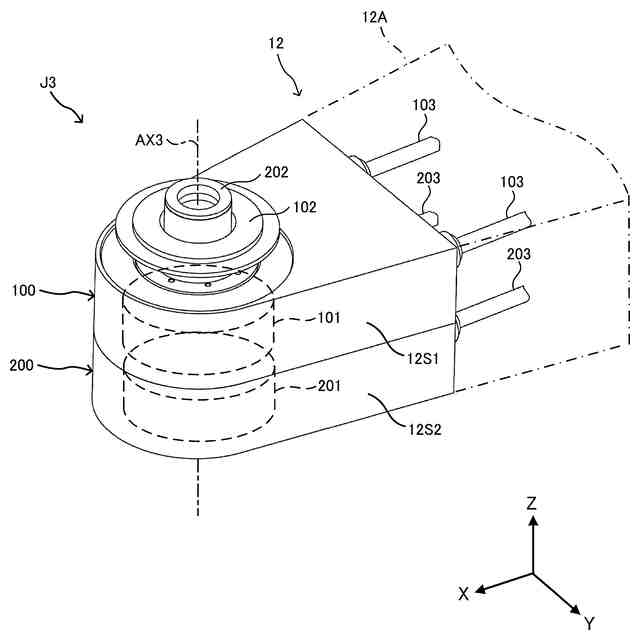
第2アームの先端部分に備えられた第1モータユニット及び第2モータユニットの外観構成の一例を表す斜視図である。
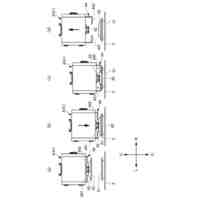
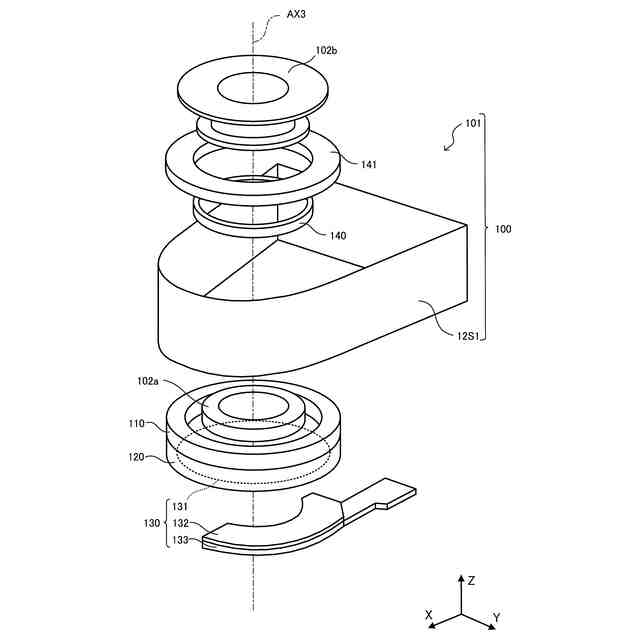
第1モータユニットの内部構成の一例を表す分解斜視図である。
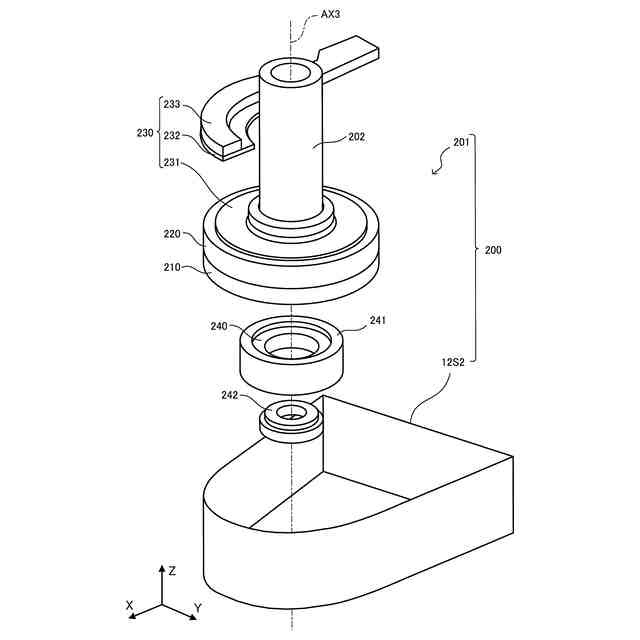
第2モータユニットの内部構成の一例を表す分解斜視図である。
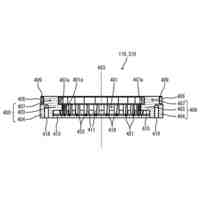
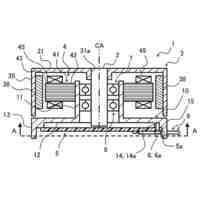
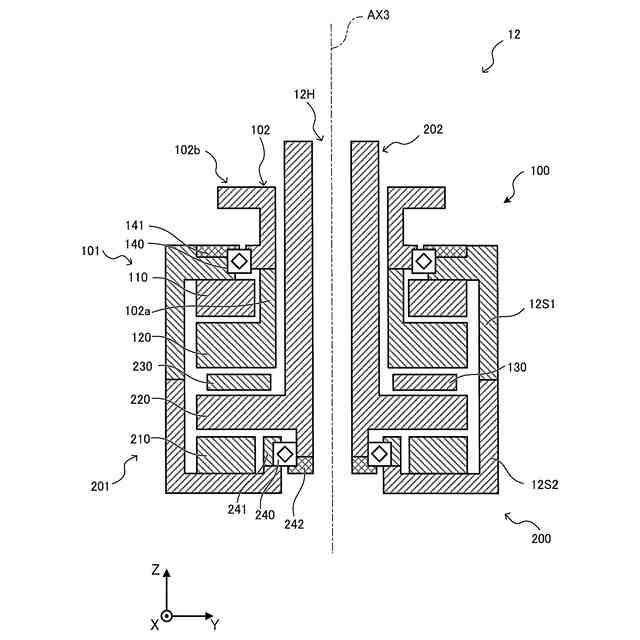
第1モータユニット及び第2モータユニットの内部構成の一例を模式的に表す断面図である。
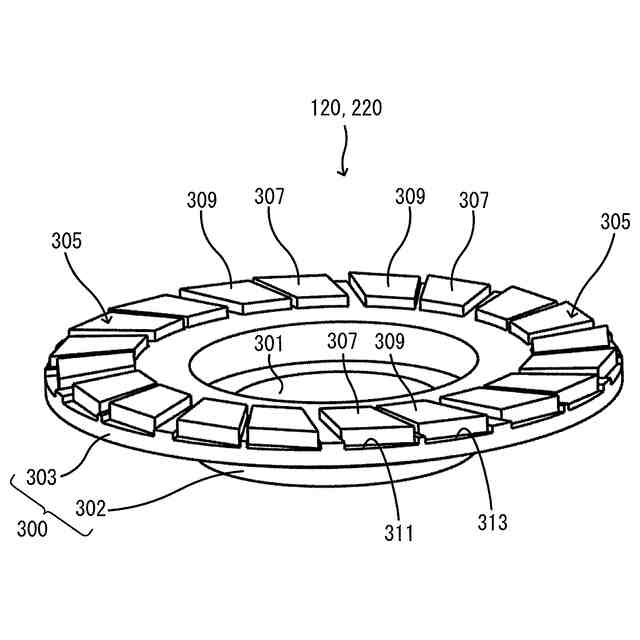
ロータの全体構成の一例を表す斜視図である
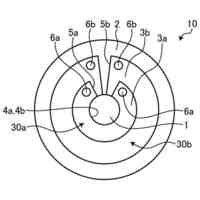
ロータの全体構成の一例を表す、軸方向におけるステータ側から見た平面図である。
ロータが備える磁石の形状の一例を表す平面図である。
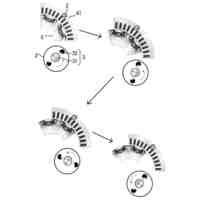
ロータが備える複数の磁石を磁石シートから切り出す態様の一例を表す平面図である。
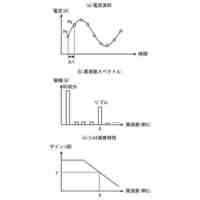
コギングトルクと磁石のシフト角の係数との関係の一例を表すグラフである。
ステータの全体構成の一例を表す、コイル側から見た斜視図である。
ステータの全体構成の一例を表す、結線基板側から見た斜視図である。
ステータの全体構成の一例を表す断面図である。
ステータが備えるボビンの構成の一例を表す斜視図である。
実施形態に係るロータの磁石の配置の一例を表す平面図である。
磁石をスキュー形状としない変形例に係るロータの磁石の配置の一例を表す平面図である。
磁石の径方向外側及び内側の辺を円弧状とした変形例に係るロータの磁石の配置の一例を表す平面図である。
磁石の径方向外側及び内側の辺を円弧状とし、且つ、磁石をスキュー形状としない変形例に係るロータの磁石の配置の一例を表す平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
摩耗情報算出システム
1か月前
株式会社安川電機
ロボットシステム及び制御方法
1か月前
株式会社安川電機
ロボット、ロボットの製造方法
2か月前
株式会社安川電機
ロボット、ロボットの製造方法
2か月前
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
24日前
キユーピー株式会社
蓋閉め装置および蓋閉め方法
1か月前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
2か月前
株式会社安川電機
ロボットシステム、及びロボットシステムの製造方法
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
ニデック株式会社
モータ
10日前
個人
発電装置
4日前
個人
電流制御形AC-DC電源
3日前
個人
ステッピングモータ実習装置
17日前
キヤノン株式会社
電源装置
4日前
キヤノン株式会社
電源装置
1か月前
株式会社竹中工務店
避雷設備
1か月前
サンデン株式会社
電力変換装置
11日前
トヨタ自動車株式会社
充電方法
24日前
トヨタ自動車株式会社
駆動装置
6日前
サンデン株式会社
電力変換装置
11日前
個人
回転力発生装置
2日前
AGC株式会社
太陽電池モジュール
1か月前
ミツミ電機株式会社
電源回路
5日前
日産自動車株式会社
回転電機
6日前
株式会社エスイー
上載物の支持装置
1か月前
新電元工業株式会社
充電装置
24日前
トヨタ自動車株式会社
電池システム
9日前
ダイハツ工業株式会社
充電システム
5日前
三菱電機株式会社
回転子および電動機
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ