TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078323
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2023190797
出願日
2023-11-08
発明の名称
ロボットシステム、ロボット、ロボットの制御方法
出願人
株式会社安川電機
代理人
弁理士法人第一テクニカル国際特許事務所
主分類
B25J
13/02 20060101AFI20250513BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの操作性を向上することができるロボットシステム、ロボット、及びロボットの制御方法を提供する。
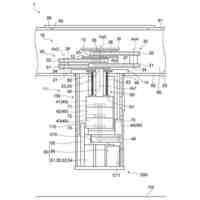
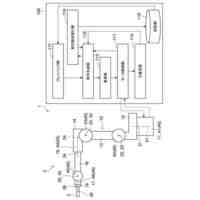
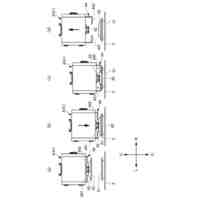
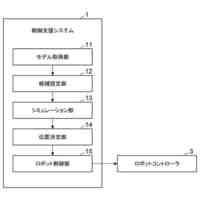
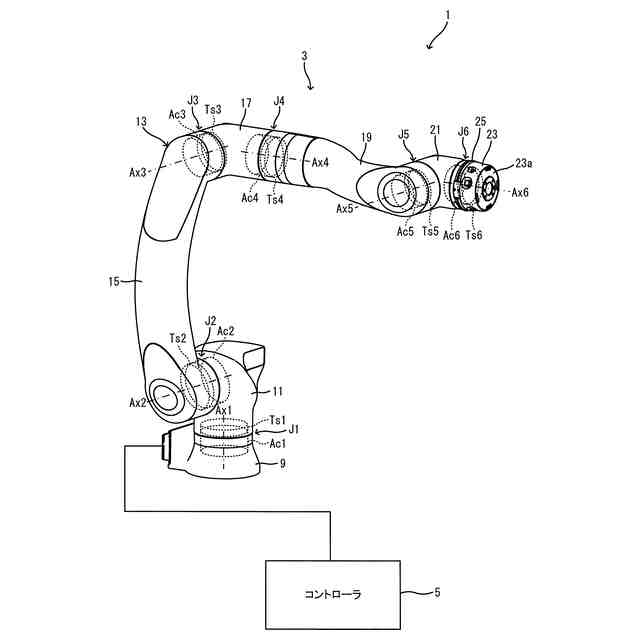
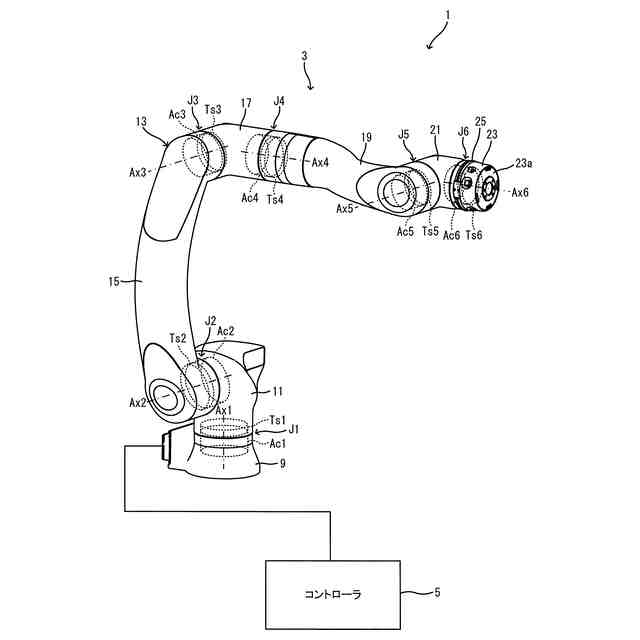
【解決手段】ロボットシステム1は、ロボット3と、ロボット3を制御するコントローラ5と、を備え、ロボット3は、アーム13と、アーム13の外周を周回する方向において複数箇所での操作が可能であり、作業者が当該操作を行った場合に当該操作に基づいてコントローラ5がロボット3を動作可能な状態にする帯状スイッチ25と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットと、
前記ロボットを制御するコントローラと、を備え、
前記ロボットは、
アームと、
前記アームの外周を周回する方向において複数箇所での操作が可能であり、作業者が当該操作を行った場合に当該操作に基づいて前記コントローラが前記ロボットを移動可能な状態にする第1操作部と、
を有する、ロボットシステム。
続きを表示(約 1,200 文字)
【請求項2】
前記第1操作部は、
前記複数箇所での操作によって前記コントローラに互いに同一の機能を実現させる、
請求項1に記載のロボットシステム。
【請求項3】
前記第1操作部は、
前記アームの外周を周回する方向に帯状に設けられた操作部である、
請求項2に記載のロボットシステム。
【請求項4】
前記ロボットは、
センサを備え、
前記コントローラは、
前記センサによって検出された物理量に基づいて、前記ロボットに加えられた外力の有無を判定する第1制御部と、
前記第1操作部が操作された後に、前記第1制御部によって前記外力があると判定された場合、当該外力に基づいて前記ロボットを移動させる第2制御部と、
を有する、請求項1に記載のロボットシステム。
【請求項5】
前記アームは、
複数のリンクと、
隣接する前記リンクを回転可能に連結する少なくとも1つの関節部と、を有し、
前記第1操作部は、
前記複数のリンクのうち、前記関節部により前記リンクの長手方向に沿った回転軸周りに回転する前記リンクの外周に設けられている、
請求項1に記載のロボットシステム。
【請求項6】
前記第1操作部は、
前記リンクの外周において前記周回する方向に半周以上に亘って設けられている、
請求項5に記載のロボットシステム。
【請求項7】
前記ロボットは、
前記リンクの外周に前記第1操作部を収容する溝部を有する、
請求項5又は6に記載のロボットシステム。
【請求項8】
前記アームは、
複数のリンクと、
隣接する前記リンクを回転可能に連結する少なくとも1つの関節部と、を有し、
前記ロボットは、
前記第1操作部が設けられた前記リンクと同一又は隣接する前記リンクに設けられた少なくとも1つの第2操作部を有し、
前記コントローラは、
前記少なくとも1つの第2操作部に、作業者が指定した機能を割り付ける第3制御部を有する、
請求項1に記載のロボットシステム。
【請求項9】
前記ロボットは、
前記アームの先端部にエンドエフェクタを有し、
前記第3制御部は、
前記少なくとも1つの第2操作部に、前記エンドエフェクタを操作する機能を割り付ける、
請求項8に記載のロボットシステム。
【請求項10】
前記第3制御部は、
前記少なくとも1つの第2操作部に、前記ロボットの動作を記憶させる教示作業の実行時に前記第2操作部が操作された際の前記アームの先端部の位置を教示点として登録する機能を割り付ける、
請求項8又は9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、ロボットシステム、ロボット、及びロボットの制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、作業者と協働作業を行う6軸の垂直多関節ロボットが記載されている。このロボットは、ロボットと協働作業を行う作業者がロボットに対して各種信号を入力するための入力スイッチを先端部に有している。
【先行技術文献】
【特許文献】
【0003】
特開2019-177432号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術のロボットは、作業者が操作する入力スイッチを備えており、操作性の更なる向上の余地があった。
【0005】
本発明はこのような問題点に鑑みてなされたものであり、ロボットの操作性を向上することができるロボットシステム、ロボット、及びロボットの制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一の観点によれば、ロボットと、前記ロボットを制御するコントローラと、を備え、前記ロボットは、アームと、前記アームの外周を周回する方向において複数箇所での操作が可能であり、作業者が当該操作を行った場合に当該操作に基づいて前記コントローラが前記ロボットを移動可能な状態にする第1操作部と、を有する、ロボットシステムが適用される。
【0007】
また、本発明の別の観点によれば、コントローラにより制御されるロボットであって、アームと、前記アームの外周を周回する方向において複数箇所での操作が可能であり、作業者が当該操作を行った場合に当該操作に基づいて前記コントローラが前記ロボットを移動可能な状態にする第1操作部と、を有する、ロボットが適用される。
【0008】
また、本発明の別の観点によれば、ロボットの制御方法であって、前記ロボットが備えるアームの外周を周回する方向において複数箇所での操作が可能な第1操作部に対して作業者が操作を行った場合に、当該操作に基づいて前記ロボットを移動可能な状態にすること、を有する、ロボットの制御方法が適用される。
【発明の効果】
【0009】
本発明のロボットシステム等によれば、ロボットの操作性を向上することができる。
【図面の簡単な説明】
【0010】
実施形態に係るロボットシステム及びロボットの構成の一例を表す図である。
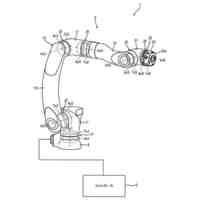
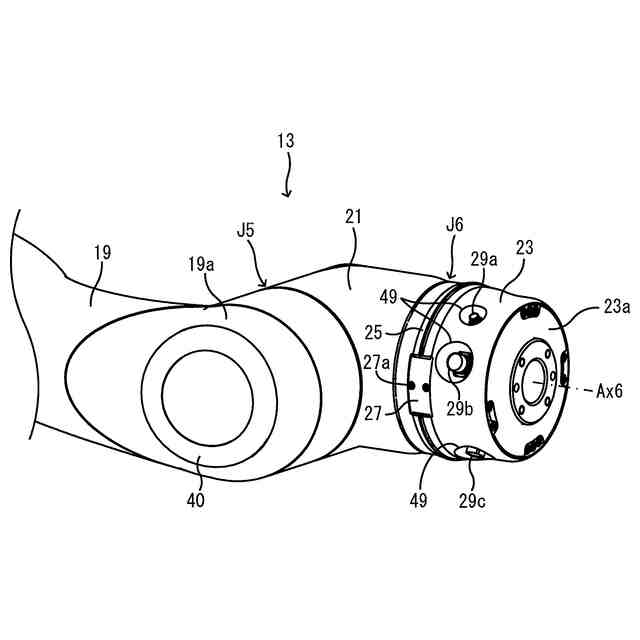
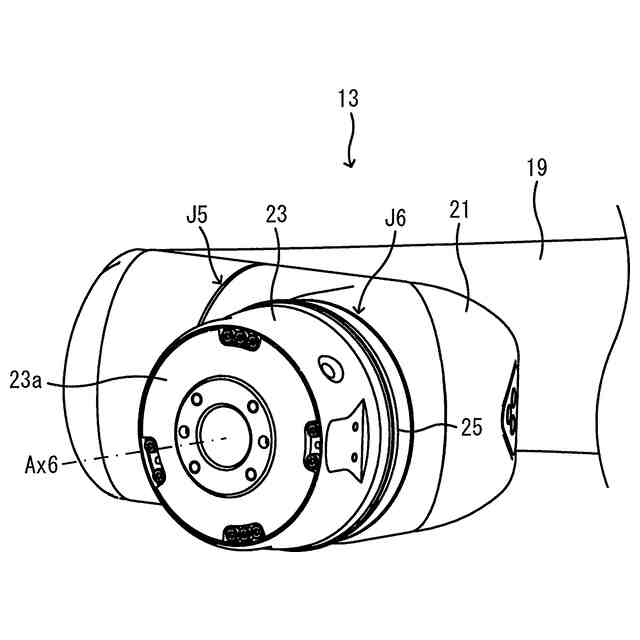
帯状スイッチの構成の一例を表す、アームの先端部近傍を拡大して示す斜視図である。
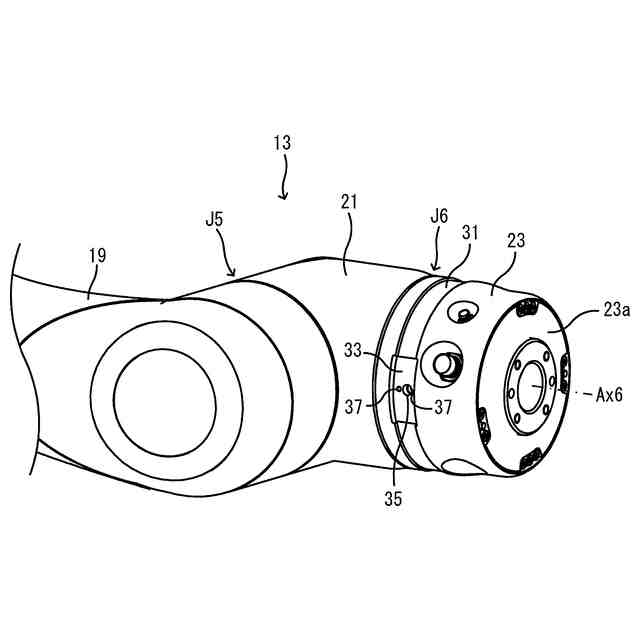
帯状スイッチの構成の一例を表す、アームの先端部近傍を他の角度から拡大して示す斜視図である。
帯状スイッチを外した状態の一例を表す、アームの先端部近傍を拡大して示す斜視図である。
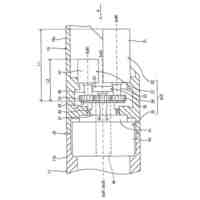
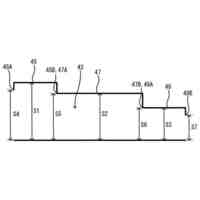
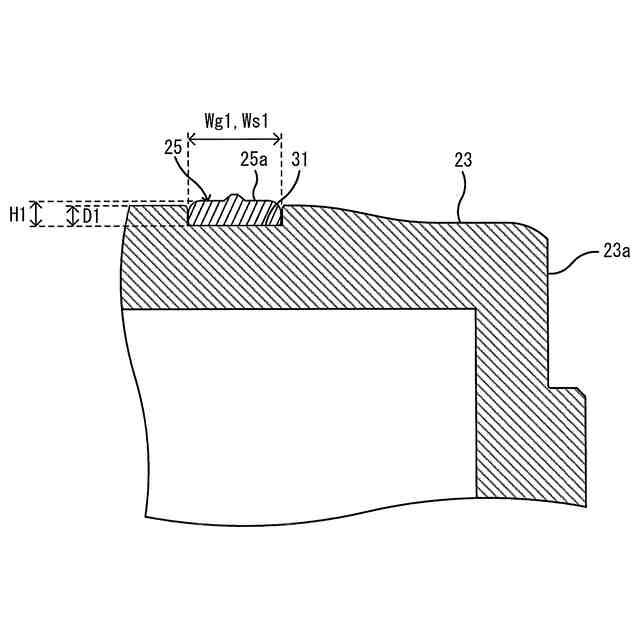
帯状スイッチを収容する溝部の断面構造の一例を表す断面図である。
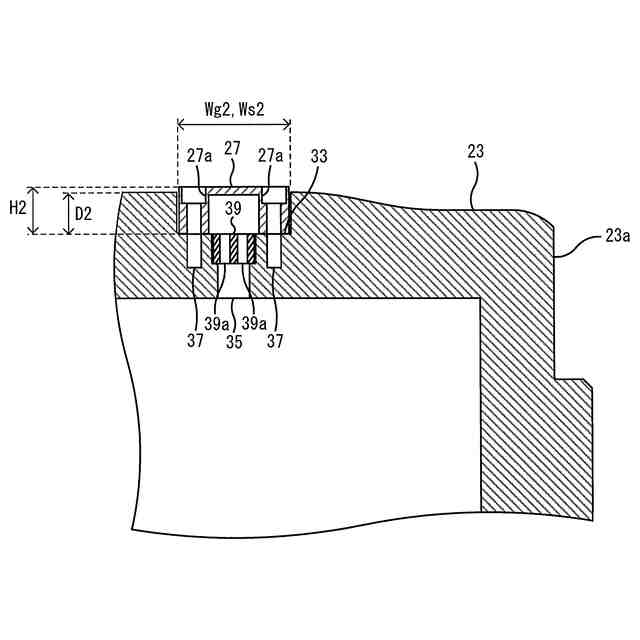
帯状スイッチの固定具を収容する凹部の断面構造の一例を表す断面図である。
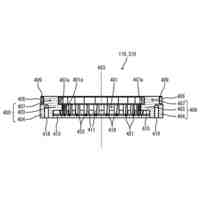
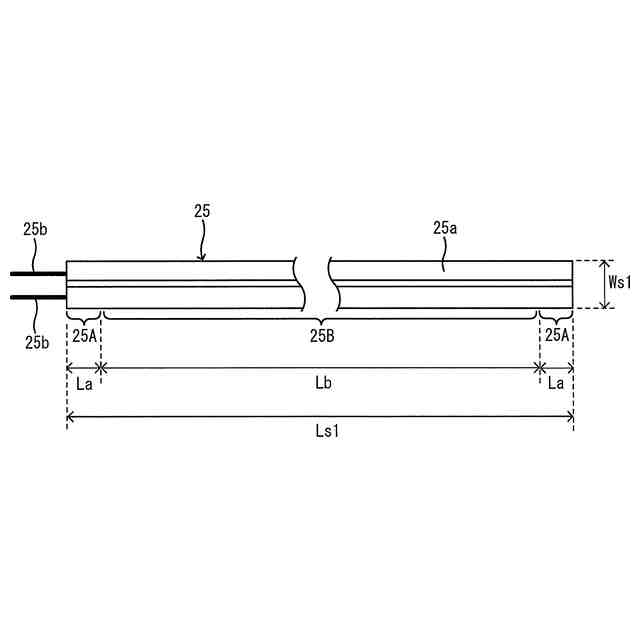
帯状スイッチの全体構成の一例を表す平面図である。
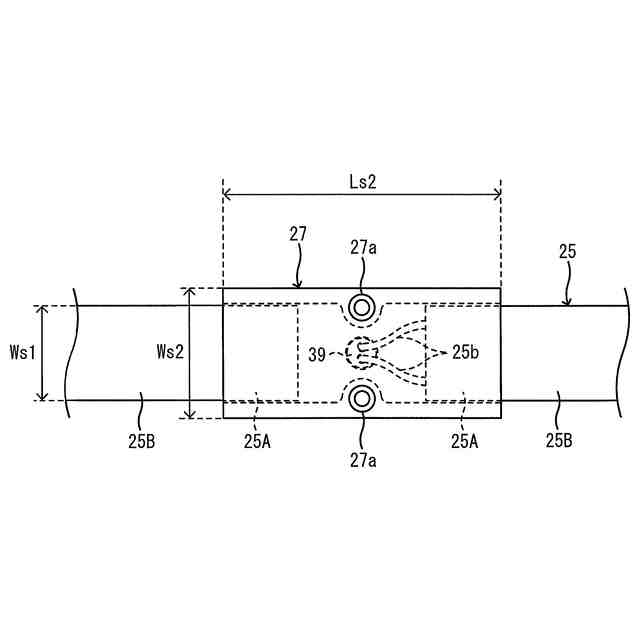
帯状スイッチの固定具の構成の一例を表す平面図である。
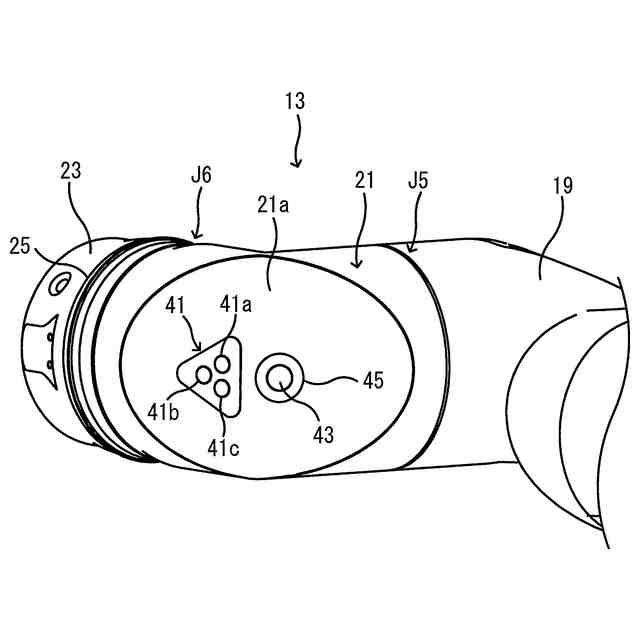
機能ボタンの構成の一例を表す、アームの先端部近傍を拡大して示す斜視図である。
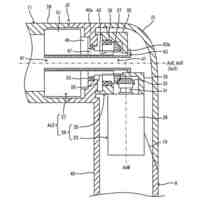
アームに設けられたコネクタとエンドエフェクタに接続されるケーブルの一例を表す、アームの先端部近傍を拡大して示す斜視図である。
アームの先端部近傍に設けられた取付部にカメラが取り付けられる場合の一例を表す説明図である。
アームの先端部をフランジ部の回転軸方向から見た構成の一例を表す図である。
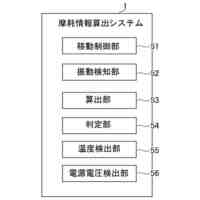
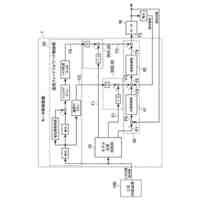
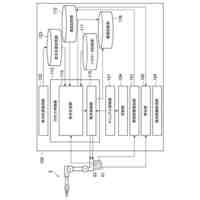
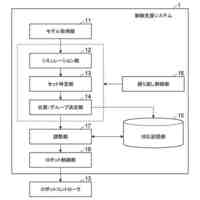
コントローラの機能構成の一例を表すブロック図である。
コントローラのハードウェア構成の一例を表すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
摩耗情報算出システム
1か月前
株式会社安川電機
ロボット、ロボットの製造方法
1か月前
株式会社安川電機
ロボット、ロボットの製造方法
1か月前
株式会社安川電機
ロボットシステム及び制御方法
25日前
株式会社安川電機
制御装置及び制御装置の冷却方法
2か月前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
2か月前
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
18日前
キユーピー株式会社
蓋閉め装置および蓋閉め方法
1か月前
株式会社安川電機
ロボットシステム、及びロボットシステムの製造方法
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
25日前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
25日前
株式会社ザイテック
吸着装置
1か月前
OMC株式会社
ロボット
3か月前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
21日前
株式会社クレスコ
補助吸着具
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社不二越
ロボット
2か月前
トヨタ自動車株式会社
関節機構
2か月前
株式会社エビス
腰ベルト用連結具
3か月前
個人
ペグハンマおよびペグハンマ用部品
25日前
住友重機械工業株式会社
教示装置
18日前
株式会社ダイヘン
搬送装置
25日前
東京都公立大学法人
対象物把持装置
2か月前
川崎重工業株式会社
ロボット
19日前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ