TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025064303
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023173941
出願日
2023-10-05
発明の名称
ロボット
出願人
OMC株式会社
代理人
個人
主分類
B25J
19/00 20060101AFI20250410BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
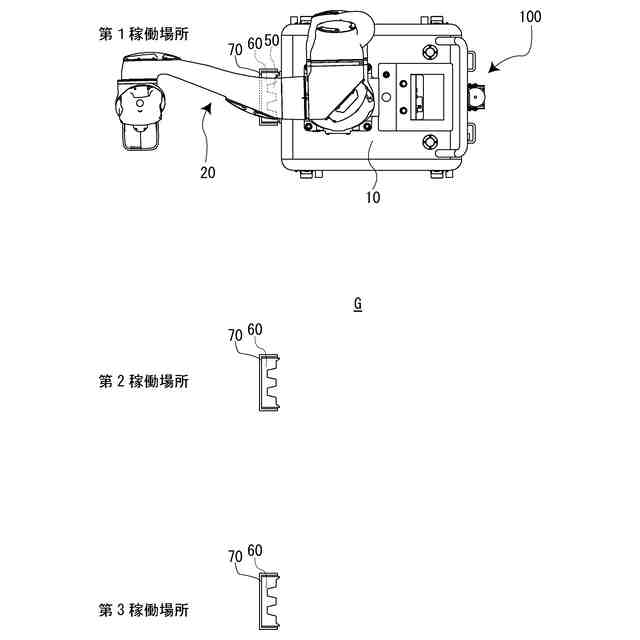
【課題】稼働場所への固定にかかる時間を短縮することができるロボットを提供することを目的とする。
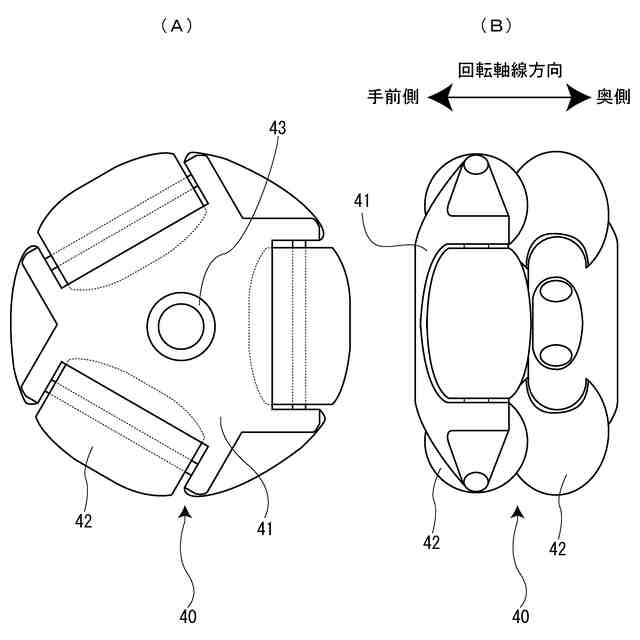
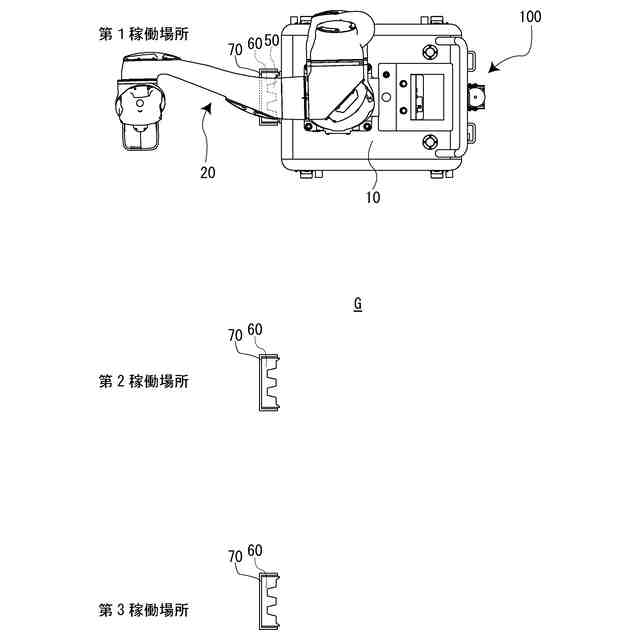
【解決手段】ロボット100は、本体部10と、本体部10に取り付けられた第1係合部材50と、第1係合部材50と係合し、複数の稼働場所に取り付けられた複数の第2係合部材60と、本体部10を移動させる移動機構40とを有し、第1係合部材50を、複数の第2係合部材60のうち1の第2係合部材60に係合させることにより、本体部10を複数の稼働場所のうち1の稼働場所に位置決めされるように構成されている。
【選択図】図5
特許請求の範囲
【請求項1】
本体部(10)と、
前記本体部に取り付けられた第1係合部材(50)と、
前記第1係合部材と係合し、複数の稼働場所に取り付けられた複数の第2係合部材(60)と、
前記本体部を移動させる移動機構(40)と、を有し、
前記第1係合部材を、複数の前記第2係合部材のうち1の前記第2係合部材に係合させることにより、前記本体部を複数の前記稼働場所のうち1の前記稼働場所に位置決めされるように構成されていることを特徴とするロボット。
続きを表示(約 950 文字)
【請求項2】
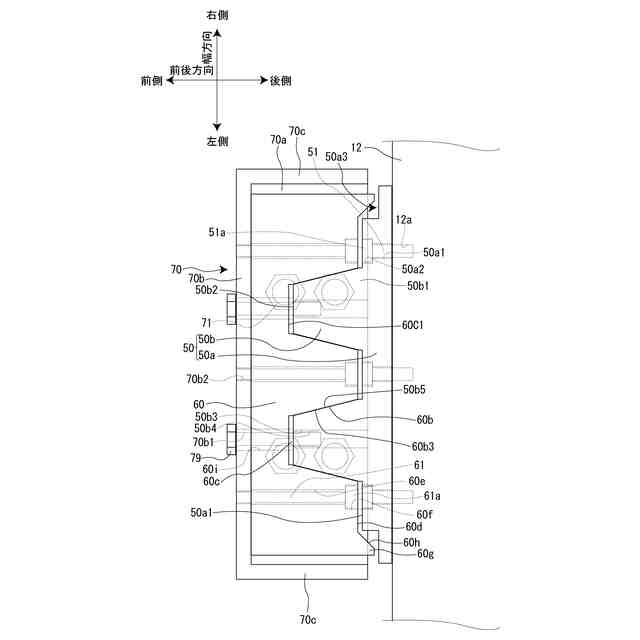
前記第1係合部材には、係合凸部(50b)が突出形成され、
前記第2係合部材には、前記係合凸部と対応した形状であり、前記係合凸部が侵入して係合する係合凹部(60b)が凹んで形成されていることを特徴とする請求項1に記載のロボット。
【請求項3】
前記係合凸部の断面形状は、基端部が先端部よりも幅広な台形状であり、
前記係合凹部の断面形状は、開口部が奥側よりも幅広な台形状であることを特徴とする請求項2に記載のロボット。
【請求項4】
前記係合凸部の基端部には、幅寸法が同一の第1同一幅部(50b1)が形成されていることを特徴とする請求項3に記載のロボット。
【請求項5】
前記係合凹部の奥部には、幅寸法が同一の第2同一幅部(60c)が形成されていることを特徴とする請求項3に記載のロボット。
【請求項6】
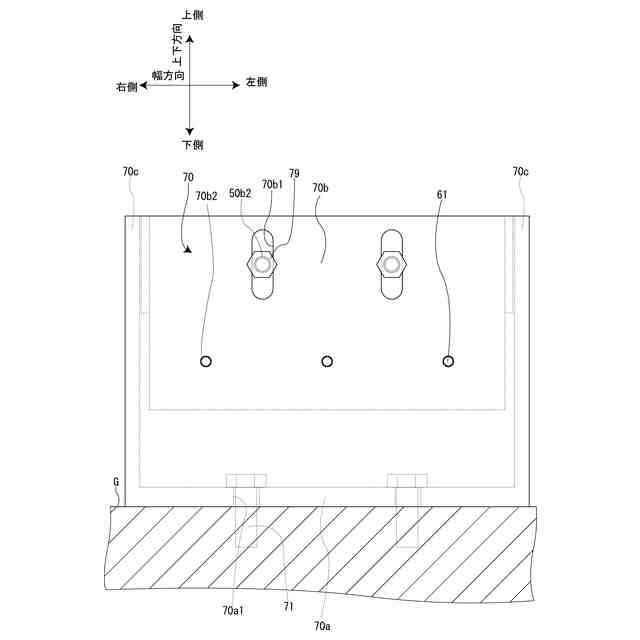
前記第2係合部材の前記第1係合部材と対向する面の両端部には、前記第1係合部材側に突出する案内突起(60g)が形成されていることを特徴とする請求項1に記載のロボット。
【請求項7】
前記案内突起の内側の側面には、前記案内突起の基端側に位置するに従って前記第2係合部材の幅方向の中央側に位置するように傾斜した案内面(60h)が形成されていることを特徴とする請求項6に記載のロボット。
【請求項8】
前記第1係合部材の幅方向の両端部には、逃げ凹部(50a3)が形成され、
前記第1係合部材と前記第2係合部材が係合した場合に、前記案内突起は前記逃げ凹部に侵入するが当接しないように構成されていることを特徴とする請求項6又は請求項7に記載のロボット。
【請求項9】
前記係合凸部は、前記第1係合部材に並んで複数形成され、
前記係合凹部は、前記係合凸部の数と同じ数だけ並んで前記第2係合部材に形成されていることを特徴とする請求項2に記載のロボット。
【請求項10】
前記第1係合部材及び前記第2係合部材は、自己潤滑性を有する樹脂で構成されていることを特徴とする請求項2に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来から、特許文献1に示されるように、複数の関節を有するロボットが有る。このようなロボットは高価であるため、1のロボットを複数の稼働場所に移動させて使用する場合が有る。このような使用方法のロボットには車輪が装着されており、ロボットを稼働場所に移動させたうえで、ロボットと稼働場所の床とをアンカーボルトにて固定していた。
【先行技術文献】
【特許文献】
【0003】
特許第7194363号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ロボットの稼働場所を変更する度に、アンカーボルトを着脱していたために、ロボットの稼働場所への固定に時間がかかるという問題が有った。
【0005】
本発明は、稼働場所への固定にかかる時間を短縮することができるロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するためになされた、請求項1に記載の発明であるロボットは、
本体部(10)と、
前記本体部に取り付けられた第1係合部材(50)と、
前記第1係合部材と係合し、複数の稼働場所に取り付けられた複数の第2係合部材(60)と、
前記本体部を移動させる移動機構(40)と、を有し、
前記第1係合部材を、複数の前記第2係合部材のうち1の前記第2係合部材に係合させることにより、前記本体部を複数の前記稼働場所のうち1の前記稼働場所に位置決めされるように構成されていることを特徴とする。
【0007】
これによれば、従来のように、ロボットの稼働場所を変更する度に、アンカーボルトを着脱する必要が無く、第1係合部材と所望の稼働場所に取り付けられた第2係合部材に係合させるだけで、ロボットが所望の稼働場所に位置決めされる。このため、稼働場所への固定にかかる時間を短縮することができるロボットを提供することができる。また、精度高く、本体部を稼働場所に位置決めすることができる。
【0008】
請求項2に記載の発明は、請求項1に記載の発明において、
前記第1係合部材には、係合凸部(50b)が突出形成され、
前記第2係合部材には、前記係合凸部と対応した形状であり、前記係合凸部が侵入して係合する係合凹部(60b)が凹んで形成されていることを特徴とする。
【0009】
これによれば、係合凸部が係合凹部に侵入して係合することにより、第1係合部材が第2係合部材に係合するので、より精度高く、第1係合部材が第2係合部材に位置決めされる。このため、より精度高く、本体部が稼働場所に位置決めされる。
【0010】
請求項3に記載の発明は、請求項2に記載の発明において、
前記係合凸部の断面形状は、基端部が先端部よりも幅広な台形状であり、
前記係合凹部の断面形状は、開口部が奥側よりも幅広な台形状であることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ